用于控制机动车辆的线控转向系统的转向锁定的方法
1.本发明涉及一种根据权利要求1的前序部分的用于控制机动车辆的线控转向系统的转向锁定的方法。
2.在线控转向系统中,车辆的方向盘与转向机构脱离。转向运动通过具有电动机的转向致动器实现。转向致动器响应于诸如方向盘角度和车辆速度等各种转向参数的检测值而进行操作。检测值从传感器以电子方式传送到转向致动器,从而使电动机驱动齿条并将可转向的轮定向在期望的方向上。
3.尽管已经除去了方向盘和车轮之间的机械连接,但是线控转向系统仍被期望产生与传统机械连接转向系统相同的功能和转向感。在移动车轮时产生的力必须被反馈到方向盘,以向驾驶员提供用于车辆的方向控制的信息。该反馈也有助于产生一种被称为转向感的转向感觉。在线控转向系统中,该反馈和转向感分别由连接到方向盘的反馈致动器产生。
4.转向柱包括锁定装置,即所谓的转向锁,其用于固定停放的车辆以防止未授权使用,并用于锁定方向盘,方向盘通常用作手柄以便于进出车辆。
5.专利申请de 10 2017 104 510 a1公开了一种具有电驱动转向锁的线控转向系统的转向柱。在转向轴的外部上布置有闭锁星形件,通过套筒组件与底盘连接的闭锁螺栓可以以已知的方式接合在闭锁星形件中,以便阻止转向轴,并且从而禁止转向过程,以便防止机动车辆的未授权的使用。然而,在闭锁螺栓的咬合位置之间,方向盘自由移动,如果驾驶员使用方向盘作为进入或离开汽车的手柄,这对于驾驶员来说是非常不舒服的。
6.本发明的目的是提供一种用于控制机动车辆的线控转向系统的转向锁定的方法,其产生更好的转向锁定。
7.该目的通过具有权利要求1的特征的用于控制机动车辆的线控转向系统的转向锁定的方法来实现。
8.因此,提供了一种用于控制机动车辆的线控转向系统的转向锁定的方法,所述线控转向系统包括反馈致动器,以模拟转向装置的转向感,其中,所述反馈致动器具有电动机和转向锁定单元,所述电动机具有连接至转向轴的电动机轴,以能够传递扭矩,所述转向锁定单元具有闭锁元件和锁定元件,所述闭锁元件以抗扭方式连接至所述转向轴,所述锁定元件被配置为在不连续的锁定位置处与所述闭锁元件接合,以阻止所述转向轴的旋转,其中,所述方法包括以下步骤:
9.·
在点火装置被切断并且检测到转向装置的运动时,确定转向轴的位置以及在转向装置的运动方向上锁定元件到下一个锁定位置的距离;
10.·
在所述距离大于预定值时,通过所述反馈致动器以与所述转向装置的运动相反的方向将反扭矩传递到所述转向轴,直到所述锁定位置到达所述锁定元件并且所述锁定元件能够与所述闭锁元件接合。
11.这样,在切断电源并且驾驶员使用转向装置作为手柄之后,其中,转向装置特别是方向盘,致动器产生使得转向困难的扭矩,直到转向轴的旋转被锁定。这模拟了与驾驶员在机电转向系统中所体验的相同的感觉。对于具有一个锁定位置的系统,锁定位置之间的角距离优选地在210度和360度之间。对于具有两个锁定位置的系统,锁定位置之间的角距离
优选地在150度和210度之间。对于具有多于两个锁定位置的系统,锁定位置之间的角距离优选地在20度和40度之间,更优选地在30度和40度之间。
12.优选地,位置传感器用于确定转向锁定单元的闭锁元件和锁定元件之间的相对位置。只要驾驶员仍在车辆中,反馈致动器就可以保持激活,或者当检测到驾驶员解锁车辆时,反馈致动器可以被置于激活状态。即使点火装置关闭,反馈致动器也连接到电源。
13.优选地,由反馈致动器施加到转向轴的反扭矩取决于在转向装置的运动方向上锁定元件到下一个锁定位置的确定距离。
14.如果反扭矩随着在转向装置的运动方向上锁定元件到下一锁定位置的角距离的减小而增加,则是有利的。优选地,通过指数函数描述该增加。
15.如果在锁定元件在方向盘运动方向上的下一个锁定位置处接合到闭锁元件期间达到由反馈致动器产生的最大反扭矩,则驾驶员的感觉被进一步改善。优选地,跟随于转向轴的角位置,由反馈致动器产生的反扭矩和由转向锁定单元的机械阻挡产生的扭矩的过渡是连续的,并且可以被不断地求导。
16.该方法还可以包括以下步骤:
17.·
在点火装置被切断并且在预定的时间间隔内没有检测到转向装置的运动时,通过反馈致动器主动地使转向轴旋转,直到最接近的锁定位置与旋转方向无关地到达锁定元件并且锁定元件能够与闭锁元件接合。
18.这样,例如如果驾驶员解锁汽车并进入时,可以确保转向锁定单元锁定转向装置的旋转,因为锁定已经在驾驶员锁定汽车之前发生。
19.在一种实施方式中,锁定元件通过弹簧相对于转向轴的旋转轴线在径向方向上向内预紧。
20.所述闭锁件可以是具有离散数量(discrete number)的相同的凹槽和相同的凸起的闭锁星形件,所述凹槽和凸起在周向方向上彼此相邻地并且等间隔地布置在外表面上,并且所述锁定元件可以是闭锁螺栓,其中所述凹槽的位置限定所述闭锁螺栓的锁定位置或卡入位置。
21.优选地,转向轴具有可围绕旋转轴线旋转的内轴和外轴,并且所述内轴和所述外轴具有适配的外轮廓和内轮廓,使得两个转向轴部件可以彼此接合并且形成抗扭但可伸缩的布置。在此优选的是,闭锁星形件周向地环绕外轴并且以抗扭地方式固定在外轴上。反馈致动器优选地作用在外轴上。此外,可以使用公差环,其同轴地布置在外轴与闭锁星形件之间。
22.下面借助于附图描述本发明的一个示例性实施例。在所有附图中,相同的附图标记表示相同的部件或功能上类似的部件。
23.图1以示意图的方式示出了线控转向系统,
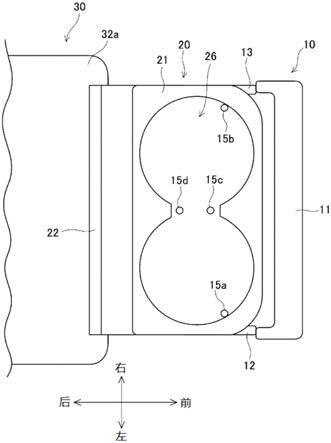
24.图2示出了转向锁定单元处于锁定位置的转向轴的横截面,
25.图3示出了转向锁定单元处于解锁位置的转向轴的横截面,
26.图4示出了转向轴的横截面,其中转向锁定单元处于另一解锁位置,以及
27.图5示出了反馈致动器施加到转向轴的扭矩与方向盘角位置的关系图。
28.图1是线控转向系统1的示意图,线控转向系统1包括用于致动车轮3的致动控制系统2和用于模拟传统机械连接的转向系统的转向感的反馈致动器4。转向装置5与转向轴6相
连,转向装置5在该例子中是方向盘,位置传感器(未示出)和扭矩传感器可操作地与转向轴6相连,位置传感器电子检测转向轴6的角位置,而扭矩传感器电子检测和评估作用在转向轴6上的扭转力。方向盘5的角位移被检测,传输到致动控制系统2,在致动控制系统2中处理,并施加到伺服电动机7上,以通过齿条81和小齿轮82系统8移动可转向的车轮3。
29.反馈致动器4包括电动机9,该电动机9具有由电动机9旋转驱动并且连接到转向轴6的电动机轴(未示出)。由于在致动控制系统和可转向的轮之间没有直接的机械连接,所以驾驶员不会通过转向机构从路面接收到任何反馈。因此,反馈致动器4基于多个转向参数,例如车辆速度、转向装置角度、转向装置角速度、转向装置转动加速度、车辆的横摆率、路面状况以及车辆的其它驾驶参数,对方向盘5产生反作用扭矩。
30.图2示出了具有闭锁星形件11和闭锁螺栓12的转向锁定单元10,图中示出了处于接合位置的闭锁星形件11。转向轴6具有可围绕旋转轴线100旋转的内轴61和外轴62。内轴61包括非圆形的、特别是近似苜蓿叶形的外轮廓。外轴62包括相应适配的内轮廓,使得两个转向轴部件可以彼此接合并且形成抗扭但可伸缩的(telescopic)布置。连接到转向轴的方向盘5示意性地示出在横截面图附近。
31.闭锁星形件11周向地围绕外轴62并且以抗扭转方式紧固到外轴62。
32.公差环13同轴地设置在外轴62和闭锁星形件11之间。其中公差环13可以在超过预定的扭矩时使得闭锁星形件11相对于外轴62运动,从而避免不必要的损坏,公差环13的作用就像过载离合器那样。
33.在闭锁星形件11的外表面上,在圆周方向上彼此相邻地且均匀地间隔地设置有离散数量的相同的凹槽14和相同的凸起15。凹槽14的位置限定了闭锁螺栓12的锁定位置或卡入位置。在锁定位置之间的角距离,可以例如在30度和40度之间,锁定位置限定为凹槽14在圆周方向上的中间位置。闭锁螺栓12可以移动到闭锁星形件11的凹槽14中,使得转向轴6在其旋转运动中被有间隙地阻挡,如图2所示。机械阻挡的间隙由凹槽14的宽度相对于闭锁螺栓12在接合区域中的宽度来限定。
34.为了释放转向轴6,闭锁螺栓12相对于转向轴的旋转轴线100沿径向方向向外移动,并且从闭锁星形件的凹槽14中移出。
35.图3和图4示出转向锁定单元10的解锁位置。
36.很可能在点火装置被切断并且驾驶员想将方向盘用作手柄以进入车辆或离开车辆的情况下,转向轴6处于转向锁定单元10不能锁定转向轴6的旋转的角位置,因为闭锁螺栓12不能与闭锁星形件11的凹槽14接合。在这种情况下,方向盘5将自由移动,这对于驾驶员来说是非常不舒适的。为了克服方向盘的自由运动,反馈致动器(未示出)用于引入反扭矩t
fba
,该反扭矩t
fba
具有与驾驶员所暗示的方向盘运动相反的方向,直到到达锁定位置。即使点火装置被切断,反馈致动器也具有动力来这样做。
37.优选地,反扭矩t
fba
取决于在方向盘运动方向上转向轴6的实际角位置到下一个锁定位置的角距离,如图5所示。该反扭矩t
fba
使得方向盘的角运动变得困难。
38.图5示出了由反馈致动器施加到转向轴的取决于方向盘角位置的反扭矩t
fba
。阻碍方向盘运动的扭矩t
sw
相对于方向盘角度α绘制。x轴上的三个杠线表示三个连续锁定位置l1、l2、l3。
39.点火装置关闭时的方向盘角位置限定了起始点sp。起始点sp位于两个锁定点之
间。由驾驶员引入的在方向盘的运动方向上的下一个锁定位置是锁定位置l2。优选地,反扭矩t
fba
随着实际的方向盘位置到下一个锁定位置的角距离的减小而增加。这种行为从机电转向系统中是已知的,机电转向系统通过方向盘的旋转抵抗车轮摩擦。该增加可以由指数函数描述。在沿方向盘运动方向的下一锁定位置处,在闭锁螺栓接合到闭锁星形件时,将达到由反馈致动器产生的最大扭矩t
fba,max
,其中,沿方向盘运动方向的下一个锁定位置对应于所示示例中的l2。在转向轴的整个角位置α上,反馈致动器产生的反扭矩t
fba
与转向锁定单元的机械阻挡产生的扭矩t
slu
的过渡优选是连续的,并且可以不断地进行求导,以防止出现奇点。
40.另外,反馈致动器可以主动地将方向盘移动到最接近的锁定位置,而与旋转方向无关,以主动地锁定方向盘。
41.优选地,反馈致动器作用在外轴上。
42.在优选实施例中,电动机将闭锁螺栓移入和移出闭锁星形件,以便锁定和解锁。
43.还可以使用闭锁螺栓借助于弹簧相对于转向轴的旋转轴线沿径向方向向内预紧。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。