1.本实用新型涉及感应灯机器人测试技术领域,具体为一种高效型感应灯轨道机器人测试控制装置。
背景技术:
2.感应灯是一种通过感应模块自动控制光源点亮的一种新型智能照明产品,感应灯是采用进口技术mcu电路设计而成,主动式红外线工作方式,具有稳定好,抗干扰强等特点,带有红外解码方式,广泛应用在要求较高的商业和工业等场合。是新一代的绿色节能照明灯具,为解决生产过程中感应产品测试效率特开发一种自动测试轨道机器人系统提高测试效率。
3.现有办法是采用人工来回走动方式测试感应距离判定被测设备是否能正常工作,易收到外界情况影响,导致测试效果不准确的情况发生。
技术实现要素:
4.本实用新型的目的在于提供一种高效型感应灯轨道机器人测试控制装置,以解决上述背景技术中提出的采用人工来回走动方式测试感应距离判定被测设备是否能正常工作,易收到外界情况影响,导致测试效果不准确的情况发生等问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种高效型感应灯轨道机器人测试控制装置,包括主测试架、第一y轴导轨、x轴导轨和恒温黑体,所述主测试架外部的一侧固定安装有紧急停止按钮,所述主测试架的一侧连接设置有第一y轴导轨,所述主测试架与第一y轴导轨属于活动连接,所述第一y轴导轨一侧的底端固定安装有第一电机。
6.优选的,所述主测试架的顶端连接设置有第一架板,所述主测试架与第一架板属于焊接。
7.优选的,所述主测试架的中间位置连接设置有第二架板,所述主测试架与第二架板属于焊接。
8.优选的,所述主测试架的底端连接设置有第三架板,所述主测试架与第三架板属于焊接。
9.优选的,所述主测试架的一侧连接设置有第二y轴导轨,所述第二y轴导轨一侧的底端固定安装有第二电机。
10.优选的,所述第二y轴导轨的内部连接设置有第一驱动装置,所述第二y轴导轨与第一驱动装置属于滑动连接,所述第一驱动装置的顶端固定连接有x轴导轨。
11.优选的,所述x轴导轨底端的一侧活动连接有第一y轴导轨,所述x轴导轨一侧的顶端固定安装有第三电机。
12.优选的,所述x轴导轨顶端的一侧连接设置有第二驱动装置,所述x轴导轨与第二驱动装置属于滑动连接。
13.优选的,所述第二驱动装置的顶端连接设置有恒温黑体,所述第二驱动装置与恒
温黑体属于固定连接。
14.与现有技术相比,本实用新型的有益效果是:
15.1.该种高效型感应灯轨道机器人测试控制装置,通过在第一y轴导轨、第二y轴导轨、x轴导轨、恒温黑体等配件,通过恒温黑体可以在x轴导轨上自由移动,同时x轴导轨在第一y轴导轨与第二y轴导轨上可以自由移动,则可以通过恒温黑体模拟人员走动,提高生产效率以及外界因素造成的判断不准现象;
16.2.该种高效型感应灯轨道机器人测试控制装置,通过电脑程序控制第一电机、第二电机、第三电机沿第一y轴导轨、第二y轴导轨、x轴导轨同步运行,带动架设x轴导轨的恒温黑体,实现s型运行模式,通过程序设定运行速度、发热体温度,y轴运行到固定距离例如18米位置,然后启动x轴运行实现一次距离测试。y轴再次运行到17米位置x轴进行反向运动回到x轴原点,提高了测试的效率;
17.3.该种高效型感应灯轨道机器人测试控制装置,通过电脑程序控制第一电机、第二电机、第三电机沿第一y轴导轨、第二y轴导轨、x轴导轨同步运行,带动架设x轴导轨的恒温黑体,实现e型运行模式,通过程序设定(运行速度、发热体温度),y轴运行到固定距离例如18米位置,然后启动x轴运行实现一次距离测试,x轴进行反向运动回到x轴原点,实现一个完整的感应距离测试。y轴电机再次运行到设定位置,x轴伺服电机实现一次往复运动,完成测试。
附图说明
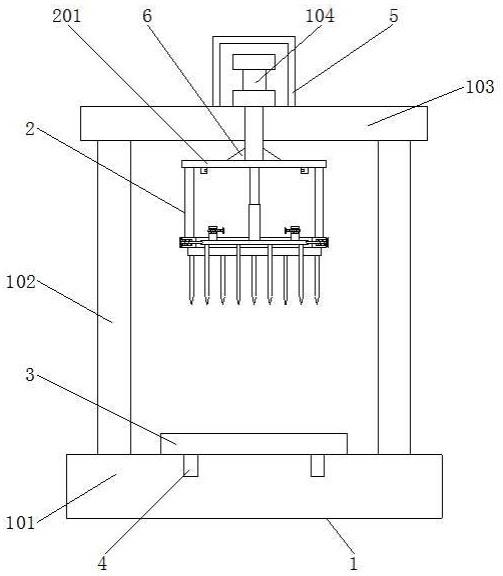
18.图1为本实用新型的正视结构示意图;
19.图2为本实用新型的s型运行结构示意图;
20.图3为本实用新型的e型运行结构示意图;
21.图4为本实用新型的x轴导轨的俯视结构示意图;
22.图5为本实用新型第二y轴导轨与x轴导轨的连接结构示意图
23.图6为本实用新型主测试架的正视结构示意图。
24.图中:1、主测试架;101、第一架板;102、第二架板;103、第三架板;104、紧急停止按钮;2、第一y轴导轨;201、第一电机;3、第二y轴导轨;301、第二电机;302、第一驱动装置;4、x轴导轨;401、第三电机;402、第二驱动装置;5、恒温黑体。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1-6,本实用新型提供的一种实施例:一种高效型感应灯轨道机器人测试控制装置,包括主测试架1、第一y轴导轨2、x轴导轨4和恒温黑体5,主测试架1的顶端连接设置有第一架板101,主测试架1与第一架板101属于焊接,主测试架1的中间位置连接设置有第二架板102,主测试架1与第二架板102属于焊接,主测试架1的底端连接设置有第三架板103,主测试架1与第三架板103属于焊接,通过第一架板101、第二架板102、第三架板103,可以完成不同高度的调节;
27.主测试架1外部的一侧固定安装有紧急停止按钮104,通过紧急停止按钮104可以控制系统进行紧急停止作业;
28.主测试架1的一侧连接设置有第一y轴导轨2,主测试架1与第一y轴导轨2属于活动连接,第一y轴导轨2一侧的底端固定安装有第一电机201,通过第一电机201启动可以带动第一y轴导轨2上的x轴导轨4进行y轴位置移动;
29.主测试架1的一侧连接设置有第二y轴导轨3,第二y轴导轨3一侧的底端固定安装有第二电机301,第二y轴导轨3的内部连接设置有第一驱动装置302,第二y轴导轨3与第一驱动装置302属于滑动连接,第一驱动装置302的顶端固定连接有x轴导轨4,通过第二电机301启动可以带动第一驱动装置302上的x轴导轨4进行y轴位置移动;
30.x轴导轨4一侧的顶端固定安装有第三电机401,x轴导轨4顶端的一侧连接设置有第二驱动装置402,x轴导轨4与第二驱动装置402属于滑动连接,第二驱动装置402的顶端连接设置有恒温黑体5,第二驱动装置402与恒温黑体5属于固定连接,通过第三电机401启动可以带动恒温黑体5进行x轴位置移动。
31.本技术实施例在使用时:通过在第一y轴导轨2、第二y轴导轨3、x轴导轨4、恒温黑体5等配件,通过恒温黑体5可以在x轴导轨4上自由移动,同时x轴导轨4在第一y轴导轨2与第二y轴导轨3上可以自由移动,则可以通过恒温黑体5模拟人员走动,提高生产效率以及外界因素造成的判断不准现象,通过程序设定运行速度、发热体温度,y轴运行到固定距离例如18米位置,然后启动x轴运行实现一次距离测试。y轴再次运行到17米位置x轴进行反向运动回到x轴原点,实现s型运行模式,同时通过程序设定运行速度、发热体温度),y轴运行到固定距离例如18米位置,然后启动x轴运行实现一次距离测试,x轴进行反向运动回到x轴原点,实现一个完整的感应距离测试。y轴电机再次运行到设定位置,x轴伺服电机实现一次往复运动,实现e型运行模式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。