1.本实用新型涉及定位设备技术领域,尤其是指一种巡边定位装置。
背景技术:
2.在线路板生产工艺中,每一步工艺有着不一样生产配置,随着自动化设备投入产线中,线路板往往需要高精度定位后进入下一步工序生产。目前,线路板自动定位取料存在精度及品质的缺陷,并且板件会出现倾斜不水平的问题,同时需要花费大量人力及时间来对产品定位校正,影响后工序的作业生产,导致产线效率偏低,满足不了产能需求,加上板件大部分为接触式定位,不利于板件品质要求,后期板件修复成本过高,对工厂经济效益大打折扣。因此,缺陷十分明显,亟需提供一种解决方案。
技术实现要素:
3.为了解决上述技术问题,本实用新型的目的在于提供一种巡边定位装置。
4.为了实现上述目的,本实用新型采用如下技术方案:
5.一种巡边定位装置,其包括基座、装设于基座的x轴驱动模组、与x轴驱动模组的输出端连接的x轴座、装设于x轴座的x轴减速感应器、装设于x轴座的x轴位移传感器、装设于基座并架设于x轴驱动模组的机架、装设于机架的y轴驱动模组、与y轴驱动模组的输出端连接的y轴座及依次装设于y轴座的y轴到位停止感应器、y轴减速感应器和y轴位移传感器,所述x轴位移传感器位于x轴减速感应器远离机架的一侧,所述y轴到位停止感应器和y轴减速感应器均与y轴驱动模组电连接,所述x轴减速感应器与x轴驱动模组电连接。
6.进一步地,所述x轴减速感应器的数量和x轴位移传感器的数量均为两个,两个x轴减速感应器间距设置,两个x轴减速感应器分别与两个x轴位移传感器对应设置。
7.进一步地,所述y轴到位停止感应器、y轴减速感应器和y轴位移传感器呈直线排列设置于y轴座。
8.进一步地,所述x轴位移传感器和y轴位移传感器均为激光位移传感器。
9.进一步地,所述y轴减速感应器的数量和y轴位移传感器的数量均为两个,两个y轴减速感应器间距设置,两个y轴减速感应器分别与两个y轴位移传感器一一对应设置。
10.本实用新型的有益效果:本实用新型的结构简单,采用非接触的方式实现了对产品的精准定位,减小了接触摩擦产品的风险,保证了产品的品质,自动化感应检测产品,缩短了定位的时间,取代了现有技术中的机械拍板定位。
附图说明
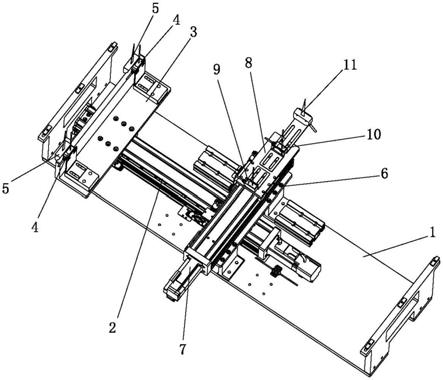
11.图1为本实用新型具有送板机构的立体结构示意图。
12.图2为本实用新型的实施例一的立体结构示意图。
13.图3为本实用新型的实施例二的立体结构示意图。
14.附图标记说明:
15.1、基座;2、x轴驱动模组;3、x轴座;4、x轴减速感应器;5、x轴位移传感器;6、机架;7、y轴驱动模组;8、y轴座;9、y轴到位停止感应器;10、y轴减速感应器;11、y轴位移传感器;12、送板机构。
具体实施方式
16.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
17.实施例一。
18.如图1和图2所示,本实用新型提供的一种巡边定位装置,其包括基座1、装设于基座1的x轴驱动模组2、与x轴驱动模组2的输出端连接的x轴座3、装设于x轴座3的x轴减速感应器4、装设于x轴座3的x轴位移传感器5、装设于基座1并架设于x轴驱动模组2的机架6、装设于机架6的y轴驱动模组7、与y轴驱动模组7的输出端连接的y轴座8及依次装设于y轴座8的y轴到位停止感应器9、y轴减速感应器10和y轴位移传感器11,所述x轴位移传感器5位于x轴减速感应器4远离机架6的一侧,所述y轴到位停止感应器9和y轴减速感应器10均与y轴驱动模组7电连接,所述x轴减速感应器4与x轴驱动模组2电连接。具体地,所述巡边定位装置还包括送板机构12,所述基座1装设于送板机构12的输送面下方,所述y轴到位停止感应器9与送板机构12电连接。优选地,所述送板机构12为辊轮输送机构,辊轮输送机构上的相邻辊轮之间具有间隙,所述间隙用于供上述的感应器或传感器提供感应或/和传感的空间。
19.本实施例以对线路板进行定位为例进行说明。在实际应用中,送板机构12对线路板进行输送,当送板机构12将线路板输送至y轴到位停止感应器9处时,y轴到位停止感应器9感应到线路板,y轴到位停止感应器9分别向送板机构12和y轴驱动模组7反馈信号,使得送板机构12停止对线路板进行输送,y轴驱动模组7驱动y轴座8连带y轴到位停止感应器9、y轴减速感应器10和y轴位移传感器11移动,以开始对线路板进行y轴方向的巡边定位工作,当线路板触发到y轴减速感应器10时,y轴减速感应器10向y轴驱动模组7反馈信号,使得y轴驱动模组7停止驱动y轴座8移动,也许y轴座8会在惯性的作用下继续移动一段距离,直至y轴座8完全停止后,y轴位移传感器11与线路板相对停止,y轴位移传感器11检测到与线路板的板边之间的y轴距离,以实现对线路板的y轴位置进行定位,完成y轴方向的巡边定位,然后x轴驱动模组2开始工作,x轴驱动模组2驱动x轴座3连带x轴减速感应器4和x轴位移传感器5移动,以开始对线路板进行x轴方向的巡边定位工作,当线路板触发到x轴减速感应器4后,x轴减速感应器4向x轴驱动模组2反馈信号,使得x轴驱动模组2停止驱动x轴座3移动,也许x轴座3会在惯性的作用下继续移动一段距离,直至x轴座3完全停止后,x轴位移传感器5与线路板相对停止,x轴位移传感器5检测到与线路板的板边之间的x轴距离,以实现对线路板的x轴位置进行定位,完成x轴方向的巡边定位,从而完成了对线路板的准确定位,保证了线路板在送板机构12上的位置精度和稳定性,可编程逻辑控制器处理巡边定位完成的距离,从而建立坐标系,逻辑运算,得出取放板机械手的移动坐标值,以便于取放板机械手精准地拾取送板机构12上的线路板。本实用新型的结构简单,采用非接触的方式实现了对产品(线路板)的精准定位,减小了接触摩擦产品的风险,保证了产品的品质,自动化感应检测产品,缩短了定位的时间,取代了现有技术中的机械拍板定位。
20.本实施例中,所述x轴减速感应器4的数量和x轴位移传感器5的数量均为两个,两
个x轴减速感应器4间距设置,两个x轴减速感应器4分别与两个x轴位移传感器5对应设置。该结构设计,在对线路板进行x轴巡边定位时,两个x轴减速感应器4分别对线路板进行感应,两个x轴位移传感器5分别对线路板的板边进行检测,实现了三点巡边定位,进一步提高了对线路板定位的精度和准确性。
21.本实施例中,所述y轴到位停止感应器9、y轴减速感应器10和y轴位移传感器11呈直线排列设置于y轴座8。
22.本实施例中,所述x轴位移传感器5和y轴位移传感器11均为激光位移传感器。
23.实施例二。
24.如图3所示,本实施例与实施例一的不同点在于:本实施例中,所述y轴减速感应器10的数量和y轴位移传感器11的数量均为两个,两个y轴减速感应器10间距设置,两个y轴减速感应器10分别与两个y轴位移传感器11一一对应设置。该结构设计,在对线路板进行y轴巡边定位时,两个y轴减速感应器10分别对线路板进行感应,两个y轴位移传感器11分别对线路板的板边进行检测,实现了四点巡边定位,进一步提高了对线路板定位的精度和准确性。
25.本实施例的其余结构与实施例一的其余结构相同,相同结构采用实施例一的解析,在此不再赘述。
26.本实施例中的所有技术特征均可根据实际需要而进行自由组合。
27.上述实施例为本实用新型较佳的实现方案,除此之外,本实用新型还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。