1.本发明涉及机器人控制技术领域,具体而言,涉及一种机器人的校准控制方法及系统、存储介质和机器人组件。
背景技术:
2.在相关技术中,机器人在工业生产过程中,需要对机器人进行校准,以保证加工精度。目前通过人工对机器人进行校准,消耗时间长,而机器人的自动校准装置无法适配多台机器人,校准效率低。
技术实现要素:
3.本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
4.为此,本发明的第一方面提出一种机器人的校准控制方法。
5.本发明的第二方面提出一种机器人的校准控制系统。
6.本发明的第三方面提出一种可读存储介质。
7.本发明的第四方面提出一种机器人组件。
8.有鉴于此,本发明的第一方面提供了一种机器人的校准控制方法,校准装置包括光电传感器和信号管理装置,信号管理装置与n个机器人相连接,n为正整数,方法包括:响应于第一机器人的第一校准请求,获取光电传感器的工作状态,其中,n个机器人包括第一机器人;根据工作状态生成对应的信号,将信号发送至对应的机器人,以使机器人根据信号进行校准。
9.在该技术方案中,机器人的校准装置设置有光电传感器,以及信号管理装置,其中,信号管理装置用于连接光电传感器,并连接n个机器人,从而与n个机器人之间进行数据指令交互。
10.当信号管理装置接收到来自第一机器人发送的第一校准请求时,根据第一校准请求,信号管理装置向光电传感器发出查询指令,从而确定光电传感器当前的工作状态。
11.其中,光电传感器包括两种工作状态,其中一种是光电传感器被其他机器人占用中,无法处理第一机器人的校准请求,即处于忙碌状态,另一种是光电传感器没有被其他机器人占用,能够处理第一机器人的校准请求,即处于空闲状态。
12.信号管理装置根据获取到的工作状态,判断当前第一机器人发送的第一校准请求能否被光电传感器处理,如果光电传感器当前的工作状态显示第一请求能够被处理,则生成对应的允许信号,并将允许信号发送至第一机器人,第一机器人在接收到允许信号后,能够与光电传感器建立连接,并通过调用光电传感器,对自身的工具坐标值、基坐标系、工具坐标系等进行校准。
13.如果光电传感器当前的工作状态显示第一校准请求无法被处理,则生成对应的拒绝信号,并将拒绝信号发送至第一机器人,第一机器人在收到拒绝信号后,将推迟校准请求,并在光电传感器能够处理第一校准请求时,再次向信号管理装置发起请求。
14.本技术通过设置信号管理装置,通过信号管理装置,基于光电传感器当前的工作状态,处理多个机器人对光电传感器的使用请求,从而使得一个光电传感器能够服务于多台机器人,使得多台机器人能够复用一套光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准,提高了校准效率。
15.另外,本发明提供的上述技术方案中的校准控制方法还可以具有如下附加技术特征:
16.在上述技术方案中,根据工作状态生成对应的信号,将信号发送至对应的机器人,包括:当工作状态为空闲状态时,生成第一信号,其中,第一信号用于指示工作状态切换为忙碌状态;将第一信号发送至第二机器人,其中,第二机器人为n个机器人中除第一机器人之外的其他机器人。
17.在该技术方案中,光电传感器的工作状态,具体包括忙碌状态和空闲状态。其中,忙碌状态代表光电传感器被其他机器人占用中,无法处理第一机器人的校准请求,而空闲状态代表光电传感器没有被其他机器人占用,能够处理第一机器人的校准请求。
18.如果信号管理装置获取到光电传感器当前的工作状态是空闲状态,则生成与空闲状态对应的第一信号,具体地,信号管理装置将第一信号发送至与信号管理装置相连接的n个机器人中,除了第一校准请求对应的第一机器人之外的,n-1个第二机器人,从而向n-1个第二机器人告知,光电传感器即将被第一机器人占用,光电传感器的实时工作状态即将切换至忙忙碌状态,从而告知n-1个第二机器人不要再发送占用请求了,从而节约处理性能。
19.能够理解的是,在一些实施方式中,第二机器人在接收到上述第一信号之后,在一段时间内,将停止发送校准请求。在另一些实施方式中,在第二机器人在接收到上述第一信号之后,如果需要进行校准,则可以发送排队请求,即请求在第一机器人结束对光电传感器的占用后,“排队”使用光电传感器进行校准,从而提高系统响应效率。
20.在上述任一技术方案中,校准控制方法还包括:当接收到第一信号对应的回应信号时,生成第二信号,将第二信号发送至第一机器人,其中,第二信号为允许第一机器人占用光电传感器的信号。
21.在该技术方案中,当信号管理装置将第一信号发送至n-1个第二机器人之后,信号管理装置持续接收来自这n-1个第二机器人针对第一信号返回的回应信号。
22.如果在预设时间段内,信号管理装置接收到了对应的n-1个回应信号,则说明与信号管理装置相连接的n-1个第二机器人均在线,且工作正常,此时,信号管理装置向第一机器人发送第二信号,第在接收到第二信号后,第一机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,此时,第一机器人可以通过信号管理装置与光电传感器之间建立数据指令交互连接,从而实现获取光电传感器的检测信号。
23.能够理解的是,第一机器人还可以直接与光电传感器建立数据指令交互连接,从而节约信号管理装置的性能资源。
24.在上述任一技术方案中,校准控制方法还包括:在预设时长内,未接收到第一信号对应的回应信号,则生成第三信号,将第三信号发送至第一机器人,其中,第三信号为拒绝第一机器人占用光电传感器的信号。
25.在该技术方案中,当信号管理装置将第一信号发送至n-1个第二机器人之后,信号管理装置持续接收来自这n-1个第二机器人针对第一信号返回的回应信号。
26.如果在预设时间段内,信号管理装置没有接收到对应的n-1个回应信号,则说明与信号管理装置相连接的n-1个第二机器人中,存在至少一台第二机器人离线,或存在至少一台第二机器人系统异常,此时,信号管理装置判断系统出现问题,此时,信号管理装置向第一机器人发送第三信号,通过第三信号拒绝第一机器人的校准请求,以防止系统故障扩大,保证机器人加工系统的运行稳定。
27.能够理解的是,在第一机器人接收到第三信号时,第一机器人得知当前系统存在故障,且第一机器人未经校准,此时第一机器人可以暂停当前的加工工作,进入待机状态,从而保证加工安全。
28.在上述任一技术方案中,在生成第三信号之后,校准控制方法还包括:生成对应的报警信息。
29.在该技术方案中,在上述预设时间段内,信号管理装置没有接收到对应的n-1个回应信号的情况下,信号管理装置判断当前连接的n个应当在线的机器人中,存在至少一个机器人离线,或存在至少一个机器人系统异常,无法响应信号管理装置的第一信号,此时,机器人组件(或机器人加工系统)存在异常,信号管理装置向管理员终端,或直接通过自身设置的扬声器、显示屏等输出设备,输出报警信息,提示机器人组件的管理员或调试员,当前机器人组件存在异常,需要清除故障。
30.在调试人员解决故障后,可通过复位机器人系统的方式,重启信号管理设备、光电传感器和相连接的n个机器人,从而防止故障扩大,保证生产安全。
31.在上述任一技术方案中,在将第二信号发送至第一机器人之后,方法还包括:根据接收到的m个第二校准请求的时间顺序,生成请求队列,m为正整数;当工作状态由忙碌状态切换为空闲状态时,确定请求队列中位于首位的目标请求对应的第三机器人;向第三机器人发送第二信号。
32.在该技术方案中,在光电传感器当前的工作状态为空闲状态,且信号管理装置接收到了n-1个第二机器人针对第一信号的返回信号后,信号管理装置发送第二信号给第一机器人,第一机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
33.此时,光电传感器的当前工作状态被切换为忙碌状态,且n-1个第二机器人均被告知光电传感器为忙碌状态。此时,如果信号管理装置再次接收到第二校准请求,则根据接收到的m个第二校准请求的先后顺序,也即每个第二校准请求的时间顺序,生成对应的请求队列,其中,请求队列中对m个第二校准请求进行了排序。
34.能够理解的是,在一些实施方式中,信号管理装置可以根据接收到的第二校准请求的时间信息,确定m个第二校准请求的先后顺序。在另一些实施方式中,信号管理装置可以根据接收到的第二校准请求的时间戳,对m个第二校准请求进行排序。
35.当第一机器人校准完毕,不再占用光电传感器时,光电传感器的当前工作状态会由忙碌状态切换回空闲状态,此时,信号管理装置在确认到光电传感器回到空闲状态后,根据请求队列中,m个第二校准请求的先后顺序,向队列中位于首位的目标请求对应的机器人,也即在第一校准请求后,最先发出第二校准请求的第三机器人,发送第二信号,告知第三机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
36.能够理解的是,在将第二信号发送到第三机器人后,光电传感器再次进入忙碌状态,并当第三机器人完成校准,光电传感器重新进入空闲状态后,信号管理装置继续向请求队列中剩下的m-1个第二校准请求对应的机器人,顺次发送第二信号,直至请求队列中的全部机器人均完成校准。
37.本发明实施例通过在光电传感器处于忙碌状态时,根据后续接收到的若干个校准请求,对发送这些校准请求的机器人进行排序,并按照队列顺序,逐个响应这些机器人的校准请求,从而实现了校准装置的高效管理,提高了校准效率。
38.在上述任一技术方案中,在向第三机器人发送第二信号之后,方法还包括:在请求队列中移除目标请求。
39.在该技术方案中,在第一机器人校准完毕,不再占用光电传感器,光电传感器的当前工作状态由忙碌状态切换回空闲状态之后,信号管理装置向当前的请求队列中,位于首位的目标请求对应的机器人,发送第二信号,发送了目标请求的机器人在接收到第二信号后,被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
40.此时,由于发送了目标请求的机器人的校准请求已被响应,该机器人即将完成校准,因此,将该机器人发送的目标请求从目标队列中移除,在将目标请求移除后,请求队列中余下m-1个第二校准请求,信号管理装置继续向请求队列中剩下的m-1个第二校准请求对应的机器人,顺次发送第二信号,直至请求队列中的全部机器人均完成校准。
41.本发明实施例通过请求队列逐个响应多个机器人的校准请求,实现了校准装置的高效管理。
42.在上述任一技术方案中,根据工作状态生成对应的信号,将信号发送至对应的机器人,还包括:基于工作状态为忙碌状态,向第一机器人发送第三信号;以及根据第一校准请求更新请求队列。
43.在该技术方案中,当信号管理装置接收到来自第一机器人发送的第一校准请求时,根据第一校准请求,信号管理装置向光电传感器发出查询指令,从而确定光电传感器当前的工作状态。
44.如果信号管理装置获取到光电传感器当前的工作状态是忙碌状态,也即当前存在其他机器人已经占用了光电传感器,光电传感器无法响应第一机器人发送的第一校准请求,则信号管理装置向第一机器人发送第三信号,通过第三信号拒绝第一机器人的校准请求,告知第一机器人,当前光电传感器处于忙碌状态。
45.同时,信号管理装置判断当前是否存在请求队列。如果当前不存在请求队列,也即没有等待进行校准的其他机器人,则根据第一校准请求生成一个新的请求队列,在新的请求队列中,第一校准请求和第一机器人位于队列的首位,当光电传感器由忙碌状态回到空闲状态后,信号管理装置会立刻向第一机器人发送第二信号,从而允许第一机器人占用光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准。
46.如果当前已经存在请求队列,也即除了第一机器人之外,还有一个或多个其他机器人处于等待校准,此时,根据第一机器人发送的第一校准请求,更新请求队列,距离来说,如果当前请求队列中有x个机器人在排队等待校准,则将第一机器人置于请求队列的队尾,形成为更新后的请求队列,更新后的请求队列中有x 1个机器人在排队等待校准,这x 1个
机器人中,包括上述第一机器人。
47.本技术通过设置信号管理装置,通过信号管理装置,基于光电传感器当前的工作状态,处理多个机器人对光电传感器的使用请求,从而使得一个光电传感器能够服务于多台机器人,使得多台机器人能够复用一套光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准,提高了校准效率。
48.本发明第二方面提供了一种机器人校准控制系统,控制系统包含校准装置、获取模块、发送模块以及控制模块;校准装置,包含:光电传感器,用于校准机器人的工具坐标;信号管理装置,与光电传感器和处理器相连接,用于连接n个机器人,以接收机器人发送的校准请求,n为正整数;获取模块,用于响应于第一机器人的第一校准请求,获取光电传感器的工作状态,其中,n个机器人包括第一机器人;发送模块,用于根据工作状态生成对应的信号,将信号发送至对应的机器人,以使机器人根据信号进行校准;控制模块包含存储器和处理器,其中存储器,用于存储程序或指令;处理器,用于执行程序或指令时实现如上述任一技术方案中提供的控制方法的步骤。
49.在该技术方案中,机器人的校准装置设置有光电传感器,以及信号管理装置,其中,信号管理装置用于连接光电传感器,并连接n个机器人,从而与n个机器人之间进行数据指令交互。
50.当信号管理装置接收到来自第一机器人发送的第一校准请求时,根据第一校准请求,信号管理装置向光电传感器发出查询指令,从而确定光电传感器当前的工作状态。
51.其中,光电传感器包括两种工作状态,其中一种是光电传感器被其他机器人占用中,无法处理第一机器人的校准请求,即处于忙碌状态,另一种是光电传感器没有被其他机器人占用,能够处理第一机器人的校准请求,即处于空闲状态。
52.信号管理装置根据获取到的工作状态,判断当前第一机器人发送的第一校准请求能否被光电传感器处理,如果光电传感器当前的工作状态显示第一请求能够被处理,则生成对应的允许信号,并将允许信号发送至第一机器人,第一机器人在接收到允许信号后,能够与光电传感器建立连接,并通过调用光电传感器,对自身的工具坐标值、基坐标系、工具坐标系等进行校准。
53.如果光电传感器当前的工作状态显示第一校准请求无法被处理,则生成对应的拒绝信号,并将拒绝信号发送至第一机器人,第一机器人在收到拒绝信号后,将推迟校准请求,并在光电传感器能够处理第一校准请求时,再次向信号管理装置发起请求。
54.本技术通过设置信号管理装置,通过信号管理装置,基于光电传感器当前的工作状态,处理多个机器人对光电传感器的使用请求,从而使得一个光电传感器能够服务于多台机器人,使得多台机器人能够复用一套光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准,提高了校准效率。
55.本发明第三方面提供了一种可读存储介质,其上存储有程序或指令,程序或指令被处理器执行时实现如上述任一技术方案中提供的校准控制方法的步骤,因此,该可读存储介质同时包括如上述任一技术方案中提供的校准控制方法的全部有益效果,为避免重复,在此不再赘述。
56.本发明第四方面提供了一种机器人组件,包括:如上述任一技术方案中提供的机器人的校准控制系统;和/或如上述任一技术方案中提供的可读存储介质,因此,该机器人
组件至少包括如上述任一技术方案中提供的机器人的校准控制系统;和/或如上述任一技术方案中提供的可读存储介质的全部有益效果,为避免重复,在此不再赘述。
57.在上述技术方案中,机器人组件还包括n个机器人本体,机器人本体与校准装置相连接,n为正整数。
58.在该技术方案中,机器人本体带动工具运动,从而对工具进行加工,光电传感器用于对机器人的工具坐标值进行校准。机器人的坐标系一般包括工具坐标系(tool)和基坐标系(base),其中,在机器人开始工作前,需要对机器人的基坐标系进行校准,从而提高机器人的加工精度。
附图说明
59.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
60.图1示出了根据本发明实施例的机器人的校准控制方法的流程图之一;
61.图2示出了根据本发明实施例的机器人组件的结构示意图;
62.图3示出了根据本发明实施例的校准装置的结构示意图;
63.图4示出了根据本发明实施例的不同信号的波形图;
64.图5示出了根据本发明实施例的机器人的校准控制方法的流程图之二;
65.图6示出了根据本发明实施例的机器人的校准控制系统的结构框图。
66.附图标记:
67.200机器人组件,202机器人本体,204工具,206工件,300校准装置,302信号管理装置,304光电传感器,306机器人控制柜。
具体实施方式
68.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
69.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
70.下面参照图1至图6描述根据本发明一些实施例所述机器人的校准控制方法及系统、存储介质和机器人组件。
71.实施例一
72.在本发明的一些实施例中,提供了一种机器人的校准控制方法,校准装置包括光电传感器和信号管理装置,信号管理装置与n个机器人相连接,n为正整数,图1示出了根据本发明实施例的机器人的校准控制方法的流程图之一,如图1所示,方法包括:
73.步骤102,响应于第一机器人的第一校准请求,获取光电传感器的工作状态;
74.在步骤102中,n个机器人包括第一机器人;
75.步骤104,根据工作状态生成对应的信号,将信号发送至对应的机器人,以使机器人根据信号进行校准。
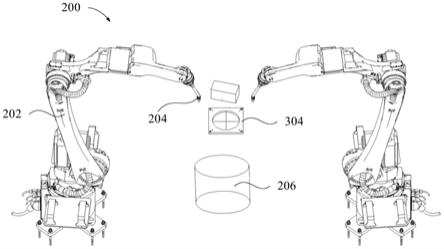
76.在本发明实施例中,图2示出了根据本发明实施例的机器人组件的结构示意图,如图2所示,机器人组件200包括:机器人本体202,工具204,工件206。其中,机器人本体202带动工具204运动,从而对工件206进行加工。
77.图3示出了根据本发明实施例的校准装置的结构示意图,如图3所示,校准装置300包括信号管理装置302,光电传感器304用于对机器人的工具坐标值进行校准。信号管理装置302与机器人控制柜306相连接,机器人控制柜306用于控制机器人本体工作。
78.具体地,当信号管理装置接收到来自第一机器人发送的第一校准请求时,根据第一校准请求,信号管理装置向光电传感器发出查询指令,从而确定光电传感器当前的工作状态。
79.其中,光电传感器包括两种工作状态,其中一种是光电传感器被其他机器人占用中,无法处理第一机器人的校准请求,即处于忙碌状态,另一种是光电传感器没有被其他机器人占用,能够处理第一机器人的校准请求,即处于空闲状态。
80.信号管理装置根据获取到的工作状态,判断当前第一机器人发送的第一校准请求能否被光电传感器处理,如果光电传感器当前的工作状态显示第一请求能够被处理,则生成对应的允许信号,并将允许信号发送至第一机器人,第一机器人在接收到允许信号后,能够与光电传感器建立连接,并通过调用光电传感器,对自身的工具坐标值、基坐标系、工具坐标系等进行校准。
81.如果光电传感器当前的工作状态显示第一校准请求无法被处理,则生成对应的拒绝信号,并将拒绝信号发送至第一机器人,第一机器人在收到拒绝信号后,将推迟校准请求,并在光电传感器能够处理第一校准请求时,再次向信号管理装置发起请求。
82.本技术通过设置信号管理装置,通过信号管理装置,基于光电传感器当前的工作状态,处理多个机器人对光电传感器的使用请求,从而使得一个光电传感器能够服务于多台机器人,使得多台机器人能够复用一套光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准,提高了校准效率。
83.在本技术的一些实施例中,根据工作状态生成对应的信号,将信号发送至对应的机器人,包括:基于工作状态为空闲状态,生成第一信号,其中,第一信号用于指示工作状态切换为忙碌状态;将第一信号发送至第二机器人,其中,第二机器人为n个机器人中除第一机器人之外的其他机器人。
84.在本发明实施例中,光电传感器的工作状态,具体包括忙碌状态和空闲状态。其中,忙碌状态代表光电传感器被其他机器人占用中,无法处理第一机器人的校准请求,而空闲状态代表光电传感器没有被其他机器人占用,能够处理第一机器人的校准请求。
85.如果信号管理装置获取到光电传感器当前的工作状态是空闲状态,则生成与空闲状态对应的第一信号,具体地,信号管理装置将第一信号发送至与信号管理装置相连接的n个机器人中,除了第一校准请求对应的第一机器人之外的,n-1个第二机器人,从而向n-1个第二机器人告知,光电传感器即将被第一机器人占用,光电传感器的实时工作状态即将切换至忙忙碌状态,从而告知n-1个第二机器人不要再发送占用请求了,从而节约处理性能。
86.能够理解的是,在一些实施方式中,第二机器人在接收到上述第一信号之后,在一段时间内,将停止发送校准请求。在另一些实施方式中,在第二机器人在接收到上述第一信号之后,如果需要进行校准,则可以发送排队请求,即请求在第一机器人结束对光电传感器
的占用后,“排队”使用光电传感器进行校准,从而提高系统响应效率。
87.在本技术的一些实施例中,控制方法还包括:当接收到第一信号对应的回应信号时,生成第二信号,将第二信号发送至第一机器人,其中,第二信号为允许第一机器人占用光电传感器的信号。
88.在本发明实施例中,当信号管理装置将第一信号发送至n-1个第二机器人之后,信号管理装置持续接收来自这n-1个第二机器人针对第一信号返回的回应信号。
89.如果在预设时间段内,信号管理装置接收到了对应的n-1个回应信号,则说明与信号管理装置相连接的n-1个第二机器人均在线,且工作正常,此时,信号管理装置向第一机器人发送第二信号,第在接收到第二信号后,第一机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,此时,第一机器人可以通过信号管理装置与光电传感器之间建立数据指令交互连接,从而实现获取光电传感器的检测信号。
90.能够理解的是,第一机器人还可以直接与光电传感器建立数据指令交互连接,从而节约信号管理装置的性能资源。
91.在本技术的一些实施例中,校准控制方法还包括:在预设时长内,未接收到第一信号对应的回应信号,则生成第三信号,将第三信号发送至第一机器人,其中,第三信号为拒绝第一机器人占用光电传感器的信号。
92.在本发明实施例中,当信号管理装置将第一信号发送至n-1个第二机器人之后,信号管理装置持续接收来自这n-1个第二机器人针对第一信号返回的回应信号。
93.如果在预设时间段内,信号管理装置没有接收到对应的n-1个回应信号,则说明与信号管理装置相连接的n-1个第二机器人中,存在至少一台第二机器人离线,或存在至少一台第二机器人系统异常,此时,信号管理装置判断系统出现问题,此时,信号管理装置向第一机器人发送第三信号,通过第三信号拒绝第一机器人的校准请求,以防止系统故障扩大,保证机器人加工系统的运行稳定。
94.能够理解的是,在第一机器人接收到第三信号时,第一机器人得知当前系统存在故障,且第一机器人未经校准,此时第一机器人可以暂停当前的加工工作,进入待机状态,从而保证加工安全。
95.在本技术的一些实施例中,在生成第三信号之后,控制方法还包括:生成对应的报警信息。
96.在本发明实施例中,在上述预设时间段内,信号管理装置没有接收到对应的n-1个回应信号的情况下,信号管理装置判断当前连接的n个应当在线的机器人中,存在至少一个机器人离线,或存在至少一个机器人系统异常,无法响应信号管理装置的第一信号,此时,机器人组件(或机器人加工系统)存在异常,信号管理装置向管理员终端,或直接通过自身设置的扬声器、显示屏等输出设备,输出报警信息,提示机器人组件的管理员或调试员,当前机器人组件存在异常,需要清除故障。
97.在调试人员解决故障后,可通过复位机器人系统的方式,重启信号管理设备、光电传感器和相连接的n个机器人,从而防止故障扩大,保证生产安全。
98.在本技术的一些实施例中,在将第二信号发送至第一机器人之后,方法还包括:根据接收到的m个第二校准请求的时间顺序,生成请求队列,m为正整数;当工作状态由忙碌状态切换为空闲状态时,确定请求队列中位于首位的目标请求对应的第三机器人;向第三机
器人发送第二信号。
99.在本发明实施例中,在光电传感器当前的工作状态为空闲状态,且信号管理装置接收到了n-1个第二机器人针对第一信号的返回信号后,信号管理装置发送第二信号给第一机器人,第一机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
100.此时,光电传感器的当前工作状态被切换为忙碌状态,且n-1个第二机器人均被告知光电传感器为忙碌状态。此时,如果信号管理装置再次接收到第二校准请求,则根据接收到的m个第二校准请求的先后顺序,也即每个第二校准请求的时间顺序,生成对应的请求队列,其中,请求队列中对m个第二校准请求进行了排序。
101.能够理解的是,在一些实施方式中,信号管理装置可以根据接收到的第二校准请求的时间信息,确定m个第二校准请求的先后顺序。在另一些实施方式中,信号管理装置可以根据接收到的第二校准请求的时间戳,对m个第二校准请求进行排序。
102.当第一机器人校准完毕,不再占用光电传感器时,光电传感器的当前工作状态会由忙碌状态切换回空闲状态,此时,信号管理装置在确认到光电传感器回到空闲状态后,根据请求队列中,m个第二校准请求的先后顺序,向队列中位于首位的目标请求对应的机器人,也即在第一校准请求后,最先发出第二校准请求的第三机器人,发送第二信号,告知第三机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
103.能够理解的是,在将第二信号发送到第三机器人后,光电传感器再次进入忙碌状态,并当第三机器人完成校准,光电传感器重新进入空闲状态后,信号管理装置继续向请求队列中剩下的m-1个第二校准请求对应的机器人,顺次发送第二信号,直至请求队列中的全部机器人均完成校准。
104.本发明实施例通过在光电传感器处于忙碌状态时,根据后续接收到的若干个校准请求,对发送这些校准请求的机器人进行排序,并按照队列顺序,逐个响应这些机器人的校准请求,从而实现了校准装置的高效管理,提高了校准效率。
105.在本技术的一些实施例中,在向第三机器人发送第二信号之后,方法还包括:在请求队列中移除目标请求。
106.在本发明实施例中,在第一机器人校准完毕,不再占用光电传感器,光电传感器的当前工作状态由忙碌状态切换回空闲状态之后,信号管理装置向当前的请求队列中,位于首位的目标请求对应的机器人,发送第二信号,发送了目标请求的机器人在接收到第二信号后,被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
107.此时,由于发送了目标请求的机器人的校准请求已被响应,该机器人即将完成校准,因此,将该机器人发送的目标请求从目标队列中移除,在将目标请求移除后,请求队列中余下m-1个第二校准请求,信号管理装置继续向请求队列中剩下的m-1个第二校准请求对应的机器人,顺次发送第二信号,直至请求队列中的全部机器人均完成校准。
108.本发明实施例通过请求队列逐个响应多个机器人的校准请求,实现了校准装置的高效管理。
109.在本技术的一些实施例中,根据工作状态生成对应的信号,将信号发送至对应的
机器人,还包括:当工作状态为忙碌状态时,向第一机器人发送第三信号;以及根据第一校准请求更新请求队列。
110.在本发明实施例中,当信号管理装置接收到来自第一机器人发送的第一校准请求时,根据第一校准请求,信号管理装置向光电传感器发出查询指令,从而确定光电传感器当前的工作状态。
111.如果信号管理装置获取到光电传感器当前的工作状态是忙碌状态,也即当前存在其他机器人已经占用了光电传感器,光电传感器无法响应第一机器人发送的第一校准请求,则信号管理装置向第一机器人发送第三信号,通过第三信号拒绝第一机器人的校准请求,告知第一机器人,当前光电传感器处于忙碌状态。
112.同时,信号管理装置判断当前是否存在请求队列。如果当前不存在请求队列,也即没有等待进行校准的其他机器人,则根据第一校准请求生成一个新的请求队列,在新的请求队列中,第一校准请求和第一机器人位于队列的首位,当光电传感器由忙碌状态回到空闲状态后,信号管理装置会立刻向第一机器人发送第二信号,从而允许第一机器人占用光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准。
113.如果当前已经存在请求队列,也即除了第一机器人之外,还有一个或多个其他机器人处于等待校准,此时,根据第一机器人发送的第一校准请求,更新请求队列,距离来说,如果当前请求队列中有x个机器人在排队等待校准,则将第一机器人置于请求队列的队尾,形成为更新后的请求队列,更新后的请求队列中有x 1个机器人在排队等待校准,这x 1个机器人中,包括上述第一机器人。
114.本技术通过设置信号管理装置,通过信号管理装置,基于光电传感器当前的工作状态,处理多个机器人对光电传感器的使用请求,从而使得一个光电传感器能够服务于多台机器人,使得多台机器人能够复用一套光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准,提高了校准效率。
115.实施例二
116.在本发明的一些实施例中,机器人组件的工作场景如图2所示,多台机器人共用一套光电传感器和信号管理装置。所有线路连接好后,调试员可以通过拨码开关标记连入了哪几号机器人。
117.当信号管理装置处于空闲状态,如1号机器人请求使用光电传感器时,信号管理装置会接收到1号机器人发出的占用光电传感器的高电平信号,此时信号管理装置会通知其他机器人处于忙碌状态。
118.当信号管理装置处于忙碌状态,若收到其他机器人发起请求,会将其标记并安排到任务队列中。
119.当信号管理装置完成一个任务时,会检测是否有队列任务,若无则通知所有机器人,处于空闲状态;若有队列,则每次取一次队首机器人号,并安排其进行工作,直到所有队列任务完成。
120.信号管理装置由单片机或plc(programmable logic controller,可编程逻辑控制器)作为主控,由继电器、多路输入输出、信号灯等实现功能。
121.图4示出了根据本发明实施例的不同信号的波形图。
122.信号管理装置的主控状态灯绿色表示空闲,黄色表示忙碌,红色闪烁表示报警。某
一路机器人信号灯黄色表示工作中,不亮表示空闲,绿色表示排在队列中进行等待。
123.信号管理装置可以通过继电器负责光电传感器的供电、接地、两个激光传感器信号输入的线路转移,接线如图3所示。
124.图5示出了根据本发明实施例的机器人的校准控制方法的流程图之二,如图5所示,方法包括:
125.步骤502,设置连接信号管理装置的机器人数量;
126.步骤504,接收机器人的请求信号;
127.步骤506,判断光电传感器是否空闲;是则进入步骤512,否则进入步骤508;
128.步骤508,向机器人发出拒绝信号,并更新排队序列;
129.步骤510,机器人根据拒接信号将请求信号设置为低电平;
130.在步骤510中,请求信号设置为低电平,能够指示该机器人处于排队序列内。
131.步骤512,信号管理装置发出忙碌信号给其他机器人;
132.步骤514,判断是否接收到其他机器人的回复信号;是则进入步骤518,否则进入步骤516;
133.步骤516,发送拒绝信号给请求机器人,并生成报警信息;
134.步骤518,发送允许信号给请求机器人;
135.步骤520,接收请求机器人的释放信号;
136.步骤522,判断排序序列是否为空;是则进入步骤524,否则进入步骤526;
137.步骤524,发送空闲信号给全部机器人;
138.步骤526,根据排队序列,向序列中的下一个机器人发送允许信号,直至序列为空。
139.实施例三
140.在本发明的一些实施例中,提供了一种机器人的校准控制系统,图6示出了根据本发明实施例的校准控制系统的结构框图,如图6所示,校准控制系统600包含:校准装置602、获取模块604、发送模块606以及控制模块608;
141.校准装置,包含:光电传感器,用于校准机器人的工具坐标;信号管理装置,与光电传感器和处理器相连接,用于连接n个机器人,以接收机器人发送的校准请求,n为正整数;获取模块,用于响应于第一机器人的第一校准请求,获取光电传感器的工作状态,其中,n个机器人包括第一机器人;发送模块,用于根据工作状态生成对应的信号,将信号发送至对应的机器人,以使机器人根据信号进行校准;控制模块包含存储器和处理器,其中存储器,用于存储程序或指令;处理器,用于执行程序或指令时实现如上述任一技术方案中提供的控制方法的步骤。
142.在本发明实施例中,机器人的校准装置设置有光电传感器,以及信号管理装置,其中,信号管理装置用于连接光电传感器,并连接n个机器人,从而与n个机器人之间进行数据指令交互。
143.其中,光电传感器包括质量两个激光探头,这两个激光探头分别射出激光光线,具体为第一光线,和第二光线。其中,第一光线和第二光线处于相同的水平面上,且第一光线和第二光线相互垂直并相交,从而在一个水平面上形成“十字”型的光线分布。
144.信号管理装置用于连接光电传感器,并连接n个机器人,从而与n个机器人之间进行数据指令交互。
145.当信号管理装置接收到来自第一机器人发送的第一校准请求时,根据第一校准请求,信号管理装置向光电传感器发出查询指令,从而确定光电传感器当前的工作状态。
146.其中,光电传感器包括两种工作状态,其中一种是光电传感器被其他机器人占用中,无法处理第一机器人的校准请求,即处于忙碌状态,另一种是光电传感器没有被其他机器人占用,能够处理第一机器人的校准请求,即处于空闲状态。
147.信号管理装置根据获取到的工作状态,判断当前第一机器人发送的第一校准请求能否被光电传感器处理,如果光电传感器当前的工作状态显示第一请求能够被处理,则生成对应的允许信号,并将允许信号发送至第一机器人,第一机器人在接收到允许信号后,能够与光电传感器建立连接,并通过调用光电传感器,对自身的工具坐标值、基坐标系、工具坐标系等进行校准。
148.如果光电传感器当前的工作状态显示第一校准请求无法被处理,则生成对应的拒绝信号,并将拒绝信号发送至第一机器人,第一机器人在收到拒绝信号后,将推迟校准请求,并在光电传感器能够处理第一校准请求时,再次向信号管理装置发起请求。
149.本技术通过设置信号管理装置,通过信号管理装置,基于光电传感器当前的工作状态,处理多个机器人对光电传感器的使用请求,从而使得一个光电传感器能够服务于多台机器人,使得多台机器人能够复用一套光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准,提高了校准效率。
150.在本技术的一些实施例中,控制系统还包括:生成模块,用于基于工作状态为空闲状态,生成第一信号,其中,第一信号用于指示工作状态切换为忙碌状态;发送模块还用于将第一信号发送至第二机器人,其中,第二机器人为n个机器人中除第一机器人之外的其他机器人。
151.在本发明实施例中,光电传感器的工作状态,具体包括忙碌状态和空闲状态。其中,忙碌状态代表光电传感器被其他机器人占用中,无法处理第一机器人的校准请求,而空闲状态代表光电传感器没有被其他机器人占用,能够处理第一机器人的校准请求。
152.如果信号管理装置获取到光电传感器当前的工作状态是空闲状态,则生成与空闲状态对应的第一信号,具体地,信号管理装置将第一信号发送至与信号管理装置相连接的n个机器人中,除了第一校准请求对应的第一机器人之外的,n-1个第二机器人,从而向n-1个第二机器人告知,光电传感器即将被第一机器人占用,光电传感器的实时工作状态即将切换至忙忙碌状态,从而告知n-1个第二机器人不要再发送占用请求了,从而节约处理性能。
153.能够理解的是,在一些实施方式中,第二机器人在接收到上述第一信号之后,在一段时间内,将停止发送校准请求。在另一些实施方式中,在第二机器人在接收到上述第一信号之后,如果需要进行校准,则可以发送排队请求,即请求在第一机器人结束对光电传感器的占用后,“排队”使用光电传感器进行校准,从而提高系统响应效率。
154.在本技术的一些实施例中,生成模块还用于基于接收到第一信号对应的回应信号,生成第二信号;发送模块还用于将第二信号发送至第一机器人,其中,第二信号为允许第一机器人占用光电传感器的信号。
155.在本发明实施例中,当信号管理装置将第一信号发送至n-1个第二机器人之后,信号管理装置持续接收来自这n-1个第二机器人针对第一信号返回的回应信号。
156.如果在预设时间段内,信号管理装置接收到了对应的n-1个回应信号,则说明与信
号管理装置相连接的n-1个第二机器人均在线,且工作正常,此时,信号管理装置向第一机器人发送第二信号,第在接收到第二信号后,第一机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,此时,第一机器人可以通过信号管理装置与光电传感器之间建立数据指令交互连接,从而实现获取光电传感器的检测信号。
157.能够理解的是,第一机器人还可以直接与光电传感器建立数据指令交互连接,从而节约信号管理装置的性能资源。
158.在本技术的一些实施例中,生成模块还用于基于在预设时长内,未接收到第一信号对应的回应信号,生成第三信号;发送模块还用于将第三信号发送至第一机器人,其中,第三信号为拒绝第一机器人占用光电传感器的信号。
159.在本发明实施例中,当信号管理装置将第一信号发送至n-1个第二机器人之后,信号管理装置持续接收来自这n-1个第二机器人针对第一信号返回的回应信号。
160.如果在预设时间段内,信号管理装置没有接收到对应的n-1个回应信号,则说明与信号管理装置相连接的n-1个第二机器人中,存在至少一台第二机器人离线,或存在至少一台第二机器人系统异常,此时,信号管理装置判断系统出现问题,此时,信号管理装置向第一机器人发送第三信号,通过第三信号拒绝第一机器人的校准请求,以防止系统故障扩大,保证机器人加工系统的运行稳定。
161.能够理解的是,在第一机器人接收到第三信号时,第一机器人得知当前系统存在故障,且第一机器人未经校准,此时第一机器人可以暂停当前的加工工作,进入待机状态,从而保证加工安全。
162.在本技术的一些实施例中,生成模块还用于生成对应的报警信息。
163.在本发明实施例中,在上述预设时间段内,信号管理装置没有接收到对应的n-1个回应信号的情况下,信号管理装置判断当前连接的n个应当在线的机器人中,存在至少一个机器人离线,或存在至少一个机器人系统异常,无法响应信号管理装置的第一信号,此时,机器人组件(或机器人加工系统)存在异常,信号管理装置向管理员终端,或直接通过自身设置的扬声器、显示屏等输出设备,输出报警信息,提示机器人组件的管理员或调试员,当前机器人组件存在异常,需要清除故障。
164.在调试人员解决故障后,可通过复位机器人系统的方式,重启信号管理设备、光电传感器和相连接的n个机器人,从而防止故障扩大,保证生产安全。
165.在本技术的一些实施例中,生成模块还用于根据接收到的m个第二校准请求的时间顺序,生成请求队列,m为正整数;控制系统还包括:确定模块,用于基于工作状态由忙碌状态切换为空闲状态,确定请求队列中位于首位的目标请求对应的第三机器人;发送模块还用于向第三机器人发送第二信号。
166.在本发明实施例中,在光电传感器当前的工作状态为空闲状态,且信号管理装置接收到了n-1个第二机器人针对第一信号的返回信号后,信号管理装置发送第二信号给第一机器人,第一机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
167.此时,光电传感器的当前工作状态被切换为忙碌状态,且n-1个第二机器人均被告知光电传感器为忙碌状态。此时,如果信号管理装置再次接收到第二校准请求,则根据接收到的m个第二校准请求的先后顺序,也即每个第二校准请求的时间顺序,生成对应的请求队
列,其中,请求队列中对m个第二校准请求进行了排序。
168.能够理解的是,在一些实施方式中,信号管理装置可以根据接收到的第二校准请求的时间信息,确定m个第二校准请求的先后顺序。在另一些实施方式中,信号管理装置可以根据接收到的第二校准请求的时间戳,对m个第二校准请求进行排序。
169.当第一机器人校准完毕,不再占用光电传感器时,光电传感器的当前工作状态会由忙碌状态切换回空闲状态,此时,信号管理装置在确认到光电传感器回到空闲状态后,根据请求队列中,m个第二校准请求的先后顺序,向队列中位于首位的目标请求对应的机器人,也即在第一校准请求后,最先发出第二校准请求的第三机器人,发送第二信号,告知第三机器人被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
170.能够理解的是,在将第二信号发送到第三机器人后,光电传感器再次进入忙碌状态,并当第三机器人完成校准,光电传感器重新进入空闲状态后,信号管理装置继续向请求队列中剩下的m-1个第二校准请求对应的机器人,顺次发送第二信号,直至请求队列中的全部机器人均完成校准。
171.本发明实施例通过在光电传感器处于忙碌状态时,根据后续接收到的若干个校准请求,对发送这些校准请求的机器人进行排序,并按照队列顺序,逐个响应这些机器人的校准请求,从而实现了校准装置的高效管理,提高了校准效率。
172.在本技术的一些实施例中,控制系统还包括:移除模块,用于在请求队列中移除目标请求。
173.在本发明实施例中,在第一机器人校准完毕,不再占用光电传感器,光电传感器的当前工作状态由忙碌状态切换回空闲状态之后,信号管理装置向当前的请求队列中,位于首位的目标请求对应的机器人,发送第二信号,发送了目标请求的机器人在接收到第二信号后,被允许占用光电传感器进行自身的工具坐标值、基坐标系、工具坐标系等的校准,并建立与光电传感器之间的信号指令交互连接。
174.此时,由于发送了目标请求的机器人的校准请求已被响应,该机器人即将完成校准,因此,将该机器人发送的目标请求从目标队列中移除,在将目标请求移除后,请求队列中余下m-1个第二校准请求,信号管理装置继续向请求队列中剩下的m-1个第二校准请求对应的机器人,顺次发送第二信号,直至请求队列中的全部机器人均完成校准。
175.本发明实施例通过请求队列逐个响应多个机器人的校准请求,实现了校准装置的高效管理。
176.在本技术的一些实施例中,发送模块还用于基于工作状态为忙碌状态,向第一机器人发送第三信号;控制系统还包括:更新模块,用于根据第一校准请求更新请求队列。
177.在本发明实施例中,当信号管理装置接收到来自第一机器人发送的第一校准请求时,根据第一校准请求,信号管理装置向光电传感器发出查询指令,从而确定光电传感器当前的工作状态。
178.如果信号管理装置获取到光电传感器当前的工作状态是忙碌状态,也即当前存在其他机器人已经占用了光电传感器,光电传感器无法响应第一机器人发送的第一校准请求,则信号管理装置向第一机器人发送第三信号,通过第三信号拒绝第一机器人的校准请求,告知第一机器人,当前光电传感器处于忙碌状态。
179.同时,信号管理装置判断当前是否存在请求队列。如果当前不存在请求队列,也即没有等待进行校准的其他机器人,则根据第一校准请求生成一个新的请求队列,在新的请求队列中,第一校准请求和第一机器人位于队列的首位,当光电传感器由忙碌状态回到空闲状态后,信号管理装置会立刻向第一机器人发送第二信号,从而允许第一机器人占用光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准。
180.如果当前已经存在请求队列,也即除了第一机器人之外,还有一个或多个其他机器人处于等待校准,此时,根据第一机器人发送的第一校准请求,更新请求队列,距离来说,如果当前请求队列中有x个机器人在排队等待校准,则将第一机器人置于请求队列的队尾,形成为更新后的请求队列,更新后的请求队列中有x 1个机器人在排队等待校准,这x 1个机器人中,包括上述第一机器人。
181.本技术通过设置信号管理装置,通过信号管理装置,基于光电传感器当前的工作状态,处理多个机器人对光电传感器的使用请求,从而使得一个光电传感器能够服务于多台机器人,使得多台机器人能够复用一套光电传感器对自身的工具坐标值、基坐标系、工具坐标系等进行校准,提高了校准效率。
182.本发明实施例通过光电传感器,对机器人的工具坐标系进行自动校准,因此能够实现高精度且高效率的自动校准,现有的人工校准往往需要10分钟以上的校准时间,而本发明提供的自动校准仅需要15秒到60秒的时间,即可完成校准,提高了校准效率。
183.实施例四
184.在本发明的一些实施例中,提供了一种可读存储介质,其上存储有程序或指令,程序或指令被处理器执行时实现如上述任一实施例中提供的校准控制方法的步骤,因此,该可读存储介质同时包括如上述任一实施例中提供的校准控制方法的全部有益效果,为避免重复,在此不再赘述。
185.实施例五
186.在本发明的一些实施例中,提供了一种机器人组件,包括:如上述任一实施例中提供的机器人的校准控制系统;和/或如上述任一实施例中提供的可读存储介质,因此,该机器人组件至少包括如上述任一实施例中提供的机器人的校准控制系统;和/或如上述任一实施例中提供的可读存储介质的全部有益效果,为避免重复,在此不再赘述。。
187.在本发明的一些实施例中,机器人组件还包括n个机器人本体,机器人本体与校准装置相连接,n为正整数。
188.在本发明实施例中,机器人本体带动工具运动,从而对工具进行加工,光电传感器用于对机器人的工具坐标值进行校准。机器人的坐标系一般包括工具坐标系(tool)和基坐标系(base),其中,在机器人开始工作前,需要对机器人的基坐标系进行校准,从而提高机器人的加工精度。
189.本发明的描述中,术语“多个”则指两个或两个以上,除非另有明确的限定,术语“上”、“下”等指示的方位或位置关系为基于附图所述的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情
况理解上述术语在本发明中的具体含义。
190.在本发明的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本发明中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
191.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。