1.本实用新型涉及一种码垛机,具体是全自动物料码垛机。
背景技术:
2.由于人们的生活水平提升,用工成本也在大幅上升,物料搬运等各种劳动量过大的工种均出现了用工短缺的问题。
技术实现要素:
3.针对上述现有技术存在的问题,本实用新型提供全自动物料码垛机,可以通过机械化物料搬运代替人工物料搬运。
4.为了实现上述目的,本实用新型通过以下技术方案实现:全自动物料码垛机,包括物料夹具升降机构、物料夹具、卡板分离机构、链条输送机构、物料夹具龙门架,所述的物料夹具龙门架上部通过由伺服电机驱动的丝杠安装物料夹具升降机构,物料夹具升降机构机械垂臂下端安装物料夹具,物料夹具升降机构正下方设有链条输送机构,链条输送机构一端连接卡板分离机构,通过卡板分离机构将卡板输送至物料夹具升降机构下放的链条输送机构上,由物料夹具升降机构带动物料夹具进行位移,物料夹具将物料夹起后码放至卡板上,最后由链条输送机构将堆满物料的卡板向下一环节输送;所述的物料夹具升降机构包括伺服电机、梅花联轴器、轴承传动机构、齿轮传动机构、滚珠丝杠和连接螺母,伺服电机通过梅花联轴器和轴承传动机构连接齿轮传动机构,齿轮传动机构啮合通过连接螺母安装在机械垂臂内的滚珠丝杠,通过伺服电机带动梅花联轴器、轴承传动机构和齿轮传动机构,齿轮传动机构驱动滚珠丝杠做上下移动从而带动物料夹具进行升降,物料夹具龙门架配备的纵横交错布置的由伺服电机驱动的丝杠用于带动物料夹具升降机构进行前后左右移动;所述的物料夹具包括连接法兰、夹紧气缸和抓紧夹具,连接法兰通过支架和薄钢板连接抓紧夹具,薄钢板上部安装夹紧气缸,夹紧气缸通过传动机构连接抓紧夹具,夹紧气缸伸出带动抓紧夹具张开,夹紧气缸缩回带动抓紧夹具夹紧;所述的卡板分离机构包括卡板待用槽升降气缸、托板气缸和输送滚筒线,输送滚筒线上部通过支架安装卡板待用槽升降气缸和托板气缸;所述的链条输送机构包括滚筒电机、可升降输送滚筒、升降气缸、升降气缸连接轴、链条驱动电机和链条,可升降输送滚筒和链条安装在链条输送机构框架上,滚筒电机通过传动器连接输送滚筒,升降气缸通过升降气缸连接轴连接可升降输送滚筒,链条驱动电机连接链条,当卡板进入链条输送机构时,滚筒电机开始工作,带动可升降输送滚筒转动,同时升降气缸伸出,通过升降气缸连接轴将滚筒升降至合适位置,卡板上码好物料后,链条驱动电机开始工作,带动链条转动,同时升降气缸收缩,通过升降气缸连接轴将滚筒升降至合适位置,然后由链条将码好物料的卡板输送到下一个工位。
5.所述的物料夹具龙门架配备的丝杠驱动电机为伺服电机,提升控制精确性。
6.所述的物料夹具配备一个以上的夹紧气缸和抓紧夹具,可以根据需要一起夹起一个或者多个物料。
7.所述的抓紧夹具内侧设有防滑垫,防止物料脱落。
8.所述的可升降输送滚筒和链条交错布置。
9.所述的链条之间通过传动轴连接。
10.借由上述方案,本实用新型至少具有以下优点:与常规人工码垛相比,通过多个监控装置以及控制机的协调,可以快速进行货物码垛,实现了无人作业,有效降低了企业的人工成本提升了工作效率。
附图说明
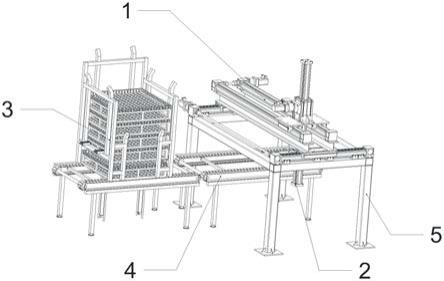
11.图1是全自动物料码垛机的立体图;
12.图2是全自动物料码垛机的物料夹具升降机构立体图;
13.图3是全自动物料码垛机的物料夹具立体图;
14.图4是全自动物料码垛机的卡板分离机构立体图;
15.图5是全自动物料码垛机的链条输送机构立体图;
16.图中:1、物料夹具升降机构,1-1、伺服电机,1-2、梅花联轴器,1-3、轴承传动机构,1-4、齿轮传动机构,1-5、滚珠丝杠,1-6、连接螺母,2、物料夹具,2-1、连接法兰,2-2、夹紧气缸,2-3、抓紧夹具,3、卡板分离机构,3-1、卡板待用槽升降气缸,3-2、托板气缸,3-3、输送滚筒线,4、链条输送机构,4-1、滚筒电机,4-2、可升降输送滚筒,4-3、升降气缸,4-4、升降气缸连接轴,4-5、链条驱动电机,4-6、链条,5、物料夹具龙门架。
具体实施方式
17.下面结合附图对本实用新型作进一步说明。
18.如图1至图5所示,本全自动物料码垛机,包括物料夹具升降机构1、物料夹具2、卡板分离机构3、链条输送机构4、物料夹具龙门架5,所述的物料夹具龙门架5上部通过由伺服电机驱动的丝杠安装物料夹具升降机构1,物料夹具升降机构1机械垂臂下端安装物料夹具2,物料夹具升降机构1正下方设有链条输送机构4,链条输送机构4一端连接卡板分离机构3,通过卡板分离机构3将卡板输送至物料夹具升降机构1下放的链条输送机构4上,由物料夹具升降机构1带动物料夹具2进行位移,物料夹具2将物料夹起后码放至卡板上,最后由链条输送机构4将堆满物料的卡板向下一环节输送;所述的物料夹具升降机构1包括伺服电机1-1、梅花联轴器1-2、轴承传动机构1-3、齿轮传动机构1-4、滚珠丝杠1-5和连接螺母1-6,伺服电机1-1通过梅花联轴器1-2和轴承传动机构1-3连接齿轮传动机构1-4,齿轮传动机构1-4啮合通过连接螺母1-6安装在机械垂臂内的滚珠丝杠1-5,通过伺服电机1-1带动梅花联轴器1-2、轴承传动机构1-3和齿轮传动机构1-4,齿轮传动机构1-4驱动滚珠丝杠1-5做上下移动从而带动物料夹具2进行升降,物料夹具龙门架5配备的纵横交错布置的由伺服电机驱动的丝杠用于带动物料夹具升降机构1进行前后左右移动;所述的物料夹具2包括连接法兰2-1、夹紧气缸2-2和抓紧夹具2-3,连接法兰2-1通过支架和薄钢板连接抓紧夹具2-3,薄钢板上部安装夹紧气缸2-2,夹紧气缸2-2通过传动机构连接抓紧夹具2-3,夹紧气缸2-2伸出带动抓紧夹具2-3张开,夹紧气缸2-2缩回带动抓紧夹具2-3夹紧;所述的卡板分离机构3包括卡板待用槽升降气缸3-1、托板气缸3-2和输送滚筒线3-3,输送滚筒线3-3上部通过支架安装卡板待用槽升降气缸3-1和托板气缸3-2;所述的链条输送机构4包括滚筒电机4-1、可升
降输送滚筒4-2、升降气缸4-3、升降气缸连接轴4-4、链条驱动电机4-5和链条4-6,可升降输送滚筒4-2和链条4-6安装在链条输送机构4框架上,滚筒电机4-1通过传动器连接输送滚筒4-2,升降气缸4-3通过升降气缸连接轴4-4连接可升降输送滚筒4-2,链条驱动电机4-5连接链条4-6,当卡板进入链条输送机构时,滚筒电机4-1开始工作,带动可升降输送滚筒4-2转动,同时升降气缸4-3伸出,通过升降气缸连接轴4-4将滚筒升降至合适位置,卡板上码好物料后,链条驱动电机4-5开始工作,带动链条4-6转动,同时升降气缸4-3收缩,通过升降气缸连接轴4-4将滚筒升降至合适位置,然后由链条4-6将码好物料的卡板输送到下一个工位。
19.所述的物料夹具龙门架5配备的丝杠驱动电机为伺服电机,提升控制精确性。
20.所述的物料夹具2配备一个以上的夹紧气缸2-2和抓紧夹具2-3,可以根据需要一起夹起一个或者多个物料。
21.所述的抓紧夹具2-3内侧设有防滑垫,防止物料脱落。
22.所述的可升降输送滚筒4-2和链条4-6交错布置。
23.所述的链条4-6之间通过传动轴连接。
24.使用时将全自动物料码垛机安装,并连接相应的监控和控制机设备即可开始运行。
25.有益效果:通过多个监控装置以及控制机的协调,可以快速进行货物码垛,实现了无人作业,有效降低了企业的人工成本提升了工作效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。