1.本公开内容的多个实施方式涉及用于运输载体、特别是在处理大面积基板期间使用的载体的设备和方法。具体地,本公开内容的多个实施方式涉及用于非接触运输载体的设备和方法,处理系统中可采用该设备和方法来进行竖直基板处理(例如,在大面积基板上沉积材料以用于显示器生产)。更具体地,本公开内容的多个实施方式涉及路径切换组件,该路径切换组件例如布置在处理系统的腔室中,被构造为横向于运输路径的运输方向移动载体,该运输路径由一个或多个用于载体运输的运输系统提供。
背景技术:
2.用于在基板上进行层沉积的技术包括例如溅射沉积、物理气相沉积(pvd)、化学气相沉积(cvd)和热蒸发。经涂覆基板可用于若干应用和若干技术领域中。例如,经涂覆基板可用于显示装置的领域中。显示装置可用于制造电视机屏幕、计算机显示器、移动电话、其他手持装置和类似装置来显示信息。典型地,通过用不同材料的层的堆叠物涂覆基板来生产显示器。
3.为了沉积层堆叠物,可使用处理模块的直列布置。直列处理系统包括多个后续处理模块(诸如沉积模块)以及可选地另外的处理模块(诸如清洁模块和/或蚀刻模块),其中处理方面随后在处理模块中进行,使得多个基板可在直列处理系统中连续地或准连续地被处理。
4.在处理期间,可由载体、即用于载送基板的载送装置载送基板。典型地使用一个或多个运输系统运输载体通过真空腔室。运输系统可被构造为用于沿一个或多个运输路径运送载体。至少两个运输路径可彼此靠近地设置在真空系统中,例如用于在向前方向上运输载体的第一运输路径和用于在与向前方向相反的返回方向上运输载体的第二运输路径。
5.常规的运输系统具有被构造为支承载体并沿运输路径运送载体和/或将载体从一个运输路径运送到另一个运输路径(也被称为“路径切换”或“轨道切换”)的辊或其他支承件。在移动载体期间在载体与载体支承件之间的摩擦可能会产生颗粒,这些颗粒可能污染沉积在基板上的层。一种在载体运输期间减少或最小化颗粒产生的方法是采用非接触运输系统。然而,在为非接触运输系统提供路径切换系统方面存在一些挑战。特别是,需要提供更短的节拍时间(tact time)、更低的成本和更简单的实现方式的路径切换系统。
技术实现要素:
6.鉴于以上情况,提供了一种根据独立权利要求的路径切换组件、切换载体的运输路径的方法和处理基板的方法。另外地,提供了一种包括根据本公开内容的多个实施方式的路径切换组件的腔室以及一种包括这种腔室的基板处理系统。另外的方面、优点和特征结构从从属权利要求、说明书和附图中显而易见。
7.根据本公开内容的一个方面,提供了一种路径切换组件。所述路径切换组件包括
一个或多个可枢转载体传送元件,所述一个或多个可枢转载体传送元件用于在路径切换方向上将载体从第一运输路径移动到侧向地偏移的第二运输路径。
8.根据本公开内容的另一个方面,提供了一种切换载体的运输路径的方法。所述方法包括将载体从第一运输系统移交到一个或多个可枢转载体传送元件,特别是根据本文描述的多个实施方式的路径切换组件的一个或多个可枢转载体传送元件。另外地,所述方法包括将所述一个或多个可枢转载体传送元件从所述第一运输系统枢转到第二运输系统。另外,所述方法包括将所述载体从所述一个或多个可枢转载体传送元件移交到所述第二运输系统。
9.根据本公开内容的另一个方面,提供一种处理基板的方法。所述方法包括将载送所述基板的载体从第一运输系统移交到一个或多个可枢转载体传送元件,特别是根据本文描述的任何实施方式的路径切换组件的一个或多个可枢转载体传送元件。另外地,所述方法包括将所述一个或多个可枢转载体传送元件从所述第一运输系统枢转到处理位置。另外,所述方法包括通过使用处理装置来处理所述基板。
10.根据本公开内容的另一个方面,提供了一种包括根据本文描述的任何实施方式的路径切换组件的腔室。所述腔室包括第一运输系统,所述第一运输系统沿第一运输路径设置以用于运输载体。另外地,所述腔室包括第二运输系统,所述第二运输系统沿从所述第一运输路径水平地偏移的第二运输路径设置。另外,所述腔室包括所述路径切换组件,其中所述一个或多个可枢转载体传送元件枢轴安装在设置在上腔室壁和底腔室壁中的至少一者中的轴承中。
11.根据本公开内容的另一个方面,提供了一种用于竖直地处理基板的处理系统。所述处理系统包括至少一个根据本文描述的任何实施方式的腔室。
12.根据本公开内容的又一个方面,提供了一种制造装置的方法。所述方法包括使用根据本公开内容的任何实施方式的路径切换组件、根据本公开内容的任何实施方式的腔室、根据本公开内容的任何实施方式的处理系统和根据本公开内容的任何实施方式的处理基板的方法。
13.多个实施方式还涉及用于进行所公开的方法的设备并且包括用于执行每个描述的方法方面的设备部分。这些方法方面可以硬件部件、由适当软件编程的计算机、这两者的任何组合或以任何其他方式执行。另外,根据本公开内容的多个实施方式还涉及用于操作所描述的设备的方法。用于操作所描述的设备的方法包括用于进行该设备的每个功能的方法方面。
附图说明
14.为了可详细地理解本公开内容的上述特征的方式,可参考多个实施方式来得到以上简要地概述的本公开内容的更特别的说明。附图涉及本公开内容的多个实施方式并且描述如下:
15.图1a示出了根据本文描述的多个实施方式的路径切换组件的示意性侧视图;
16.图1b示出了根据本文描述的多个实施方式的路径切换组件的示意性顶视图;
17.图2a和图2b示出了根据本文描述的另外的多个实施方式的路径切换组件的示意性侧视图和示意性顶视图;
18.图3a和图3b示出了路径切换组件的示意性侧视图和示意性顶视图,例示了根据本文描述的多个实施方式的路径切换组件的另外的方面;
19.图4a示出了包括根据本文描述的多个实施方式的路径切换组件的腔室的示意性侧视图;
20.图4b示出了包括根据本文描述的多个实施方式的路径切换组件的腔室的示意性顶视图;
21.图5示出了根据本文描述的多个实施方式的处理系统的示意图;
22.图6a示出了根据本文描述的多个实施方式的用于例示切换载体的运输路径的方法的流程图;
23.图6b示出了根据本文描述的多个实施方式的用于描述切换载体的运输路径的方法的示意性例示图;
24.图7a示出了用于根据本文描述的多个实施方式的例示处理基板的方法的流程图;
25.图7b示出了根据本文描述的多个实施方式的用于描述处理基板的方法的示意性例示图;并且
26.图8示出了根据本文描述的多个实施方式的用于例示制造装置的方法的流程图。
具体实施方式
27.现将详细地参考本公开内容的各种实施方式,这些实施方式的一个或多个示例例示于各图中。在以下对附图的描述内,相同的附图标记是指相同的部件。仅描述了相对于单独实施方式的差异。每个示例以解释本公开内容的方式提供,并且不意在作为本公开内容的限制。另外,被例示或描述为一个实施方式的部分的特征结构可在其他多个实施方式上使用或结合其他多个实施方式使用,以产生又一个实施方式。说明书旨在包括此类修改和变化。
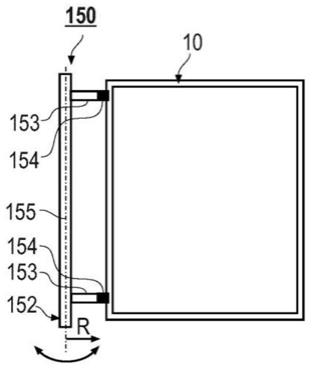
28.示例性参考图1a和图1b,描述了根据本公开内容的路径切换组件150。图1a示出了路径切换组件的侧视图,而图1b示出了路径切换组件的顶视图。根据可与本文描述的任何其他多个实施方式组合的多个实施方式,路径切换组件150包括一个或多个可枢转载体传送元件152,该一个或多个可枢转载体传送元件用于将载体10在路径切换方向s上从第一运输路径t1移动到侧向地偏移的第二运输路径t2。典型地,第一运输路径t1和第二运输路径t2实质上彼此平行。如图1a中的双向箭头示例性地指示的,一个或多个可枢转载体传送元件152可围绕旋转轴线155枢转。典型地,旋转轴线155是竖直的,即,旋转轴线155在竖直方向上延伸。
29.在本公开内容中,“竖直方向”被认为是实质上平行于重力延伸所沿的方向的方向。竖直方向可偏离精确竖直度(后者是由重力限定)达(例如)至多15度的角度。“侧向方向”应理解为区分于竖直方向。侧向方向可垂直于或实质上垂直于由重力限定的精确竖直方向。
30.因此,从图1a和图1b,应当理解,术语“侧向地偏移”可被理解为“水平地偏移”或“垂直于运输方向t偏移”。
31.如图1b示例性地所示,第一运输路径t1和第二运输路径t2典型地在运输方向t上延伸。另外,在图1b中,指示路径切换方向s。因此,应当理解,运输方向t和路径切换方向s典
型地限定水平平面。
32.在本公开内容中,“路径切换组件”可被理解为被构造为使载体在彼此侧向地偏移的不同位置之间移动的组件,例如不同运输路径之间移动的组件。特别地,典型地,路径切换组件被构造为用于使载体在路径切换方向s上侧向地移动。示例性地参考图1b,应当理解,术语“路径切换方向”可被理解为水平方向,特别是垂直于运输方向t。从图1a和图1b可理解,典型地,运输方向t也是实质上水平的方向。因此,运输方向t和路径切换方向s典型地跨越(span)水平平面。
33.因此,与常规的路径切换系统相比,本公开内容的路径切换组件的多个实施方式得到改善。特别地,如本文所描述的路径切换组件的多个实施方式提供了更短的节拍时间、更低的成本和更简单的实现方式。
34.在本公开内容中,“载体”可被理解为被构造为用于保持基板的载体,也被称为基板载体。例如,载体可以是用于载送大面积基板的基板载体。应当理解,路径切换组件的多个实施方式也可用于其他载体类型,例如掩模载体。因此,附加地或另选地,载体可以是被构造为用于载送掩模的载体。
35.在本公开内容中,术语“基板”可特别地涵盖实质上非柔性基板,例如晶片、透明晶体(诸如蓝宝石或类似晶体)的切片,或者玻璃板。然而,本公开内容不限于此,并且术语“基板”还可涵盖柔性基板,诸如卷材或箔。术语“实质上非柔性”应当理解为区分于“柔性”。特别地,实质上非柔性的基板可具有一定程度的柔性,例如具有0.5mm或更低的厚度的玻璃板,其中与柔性基板相比,实质上非柔性的基板的柔性小。根据本文描述的多个实施方式,基板可由适于材料沉积的任何材料制成。例如,基板可由选自由以下项组成的组中的材料制成:玻璃(例如,钙钠玻璃、硼硅玻璃等)、金属、聚合物、陶瓷、化合物材料、碳纤维材料或可通过沉积工艺涂覆的任何其他材料或材料组合。
36.在本公开内容中,术语“大面积基板”指代具有面积为0.5m2或更大、特别是1m2或更大的主表面的基板。在一些实施方式中,大面积基板可以是第4.5代(对应于约0.67m2基板(0.73m
×
0.92m))、第5代(对应于约1.4m2基板(1.1m
×
1.3m))、第7.5代(对应于约4.29m2基板(1.95m
×
2.2m))、第8.5代(对应于约5.7m2基板(2.2m
×
2.5m))或甚至第10代(对应于约8.7m2基板(2.85m
×
3.05m))。可类似地实现甚至更高的代(诸如第11代和第12代)和对应的基板面积。另外,基板厚度可以是从0.1mm至1.8mm,特别是约0.9mm或更低,诸如0.7mm或0.5mm。
37.示例性地参考图1b,根据可与本文描述的其他多个实施方式组合的多个实施方式,一个或多个可枢转载体传送元件152具有从第一运输路径t1侧向地偏移第一距离d1的旋转轴线155。另外,一个或多个可枢转载体传送元件152的旋转轴线155可从第二运输路径t2侧向地偏移第二距离d2。典型地,第二距离d2小于第一距离d1(即,d2<d1)。
38.如图1a和图1b中示例性地指示的,根据可与本文描述的其他多个实施方式组合的多个实施方式,一个或多个可枢转载体传送元件152包括从旋转轴线径向地延伸的载体保持元件153。径向方向r在图1a和图1b中示例性地指示。典型地,一个或多个可枢转载体传送元件152包括用于保持载体10的载体保持接口154,特别是载体保持元件153包括用于保持载体10的载体保持接口154。因此,应当理解,载体保持元件153适于耦接到设置在载体10处的相应耦接元件,特别是载体保持接口154适于耦接到设置在载体10处的相应耦接元件。例
如,载体保持接口154可包括允许围绕竖直轴线的旋转移动的耦接件。因此,当载体10耦接到一个或多个可枢转载体传送元件152时,在一个或多个可枢转载体传送元件的枢转期间,可维持载体的取向。特别地,在枢转期间,载体可保持实质上平行于第一运输路径t1和/或第二运输路径t2。
39.示例性地参考图2a和2b,根据可与本文描述的其他多个实施方式组合的多个实施方式,一个或多个可枢转载体传送元件152包括具有第一旋转轴线155a的第一可枢转载体传送元件152a和具有第二旋转轴线155b的第二可枢转载体传送元件152b。第二旋转轴线155b平行于第一旋转轴线155a。特别地,如图2a示例性地指示的,第一旋转轴线155a和第二旋转轴线155b间隔开距离d,该距离实质上对应于载体10的长度l。
40.根据可与本文描述的其他多个实施方式组合的多个实施方式,如图2a示例性地指示的,第一可枢转载体传送元件152a和第二可枢转载体传送元件152b可具有不同结构。特别地,第一可枢转载体传送元件152a可包括竖直地取向的轴159,该竖直地取向的轴具有至少载体10的高度h的竖直延度(extension)。另外,如图2a示例性指示的,第一可枢转载体传送元件152a的载体保持元件153可布置成分别耦接到载体的上部分和下部分。第二可枢转载体传送元件152b可包括从第二旋转轴线155b径向地延伸的臂157。另外,如图2a示例性地所示,臂可包括钩状结构。因此,第二可枢转载体传送元件152b可具有钩状结构,其中钩的一端包括第二旋转轴线155b,而钩的另一端包括用于将载体耦接到第二可枢转载体传送元件152b的载体保持接口154。
41.如图2a示例性地所示,可提供上第二可枢转载体传送元件152bu和下第二可枢转载体传送元件152bl。例如,上第二可枢转载体传送元件152bu和下第二可枢转载体传送元件152bl可安装成彼此镜像对称,特别是相对于水平对称平面彼此镜像对称。
42.示例性地参考图3a,根据可与本文描述的其他多个实施方式组合的多个实施方式,一个或多个可枢转载体传送元件152枢轴安装在轴承156中。特别地,如参考图4a示例性地描述的,轴承156可以是馈通轴承(feedthrough bearing),例如设置在上腔室壁和底腔室壁中。
43.根据可与本文描述的其他多个实施方式组合的多个实施方式,如图3a示例性地示出的,一个或多个可枢转载体传送元件152中的至少一者连接到用于使一个或多个可枢转载体传送元件152围绕旋转轴线155枢转的驱动器158。根据一个示例,第一可枢转载体传送元件连接到驱动器158并且第二可枢转载体传送元件152b可连接到驱动器158。例如,上第二可枢转载体传送元件152bu和/或下第二可枢转载体传送元件152bl可连接到驱动器。
44.尽管图中未明确地示出,但是应当理解,根据可与本文描述的其他多个实施方式组合的多个实施方式,可提供同步机构以用于使第一可枢转载体传送元件152a的运动与第二可枢转载体传送元件152b的运动同步。因此,可提供另外的同步机构以使上第二可枢转载体传送元件152bu的运动与下第二可枢转载体传送元件152bl的运动同步。
45.示例性地参考图3b,应当理解,如本文所描述的路径切换组件150被构造为将载体侧向地移动到载体保持元件153的径向延度的范围内的任何位置。例如,如图3b示例性地指示的,载体可移动到从第二运输路径t2侧向地偏移的处理位置pr。
46.示例性地参考图4a和图4b,描述了包括根据本公开内容的路径切换组件150的腔室210。例如,腔室210可以是用于如本文所描述那样竖直地处理基板的基板处理系统200的
真空腔室。因此,腔室210可以是真空腔室。
47.术语“真空”可被理解为具有小于例如10毫巴的真空压强的技术真空。典型地,如本文所描述的真空腔室中的压强可在10-5
毫巴与约10-8
毫巴之间,更典型地在10-5
毫巴与10-7
毫巴之间,并且甚至更典型地在约10-6
毫巴与约10-7
毫巴之间。根据一些实施方式,真空腔室中的压强可认为是真空腔室内的蒸发材料的分压强或总压强(当仅存在蒸发材料作为要被沉积在真空腔室中的组分时,两者可近似相同)。在一些实施方式中,真空腔室中的总压强可在约10-4
毫巴至约10-7
毫巴的范围内,尤其是在真空腔室中存在除蒸发材料之外的第二组分(诸如气体或类似组分)的情况下。因此,真空腔室可以是“真空沉积腔室”,即,被构造为用于真空沉积的真空腔室。
48.根据可与本文中描述的任何其他多个实施方式组合的多个实施方式,腔室210包括沿第一运输路径t1设置的第一运输系统101以用于运输载体10。另外,该腔室包括第二运输系统102,该第二运输系统沿从第一运输路径t1水平地偏移的第二运输路径t2设置。在本公开内容中,“运输系统”可被理解为被构造为用于沿运输路径在运输方向上运输载体的系统。术语“运输方向”可被理解为载体沿运输路径被运输的方向。典型地,运输方向可以是实质上水平的方向。
49.另外,腔室210包括根据本文描述的任何实施方式的路径切换组件150。路径切换组件150的一个或多个可枢转载体传送元件152枢轴安装在轴承156中,特别是馈通轴承中,该轴承设置在上腔室壁210u和下腔室壁210b中的至少一者中。
50.根据可与本文描述的任何其他实施方式组合的多个实施方式,如图4b示例性地所示,腔室包括从第二运输系统102侧向地偏移的处理装置205。处理装置205可选自由以下项组成的群组:沉积源、蒸发源、溅射源或任何其他处理装置,特别是被构造为用于竖直大面积基板处理。
51.根据可与本文描述的任何其他实施方式组合的实施方式,第一运输系统101和第二运输系统102是磁悬浮系统。
52.在本公开内容中,“磁悬浮系统”可被理解为被构造为用于通过使用磁力以非接触方式保持物体(例如,载体)的系统。在本公开内容中,术语“悬浮(levitating)”或“悬浮(levitation)”指代物体(例如,载送基板或掩模的载体)的状态,其中物体在没有机械接触或支承的情况下漂浮。另外,移动或运输物体指代提供驱动力,例如在不同于悬浮力的方向上的力,其中物体从一个位置移动到另一个不同位置,例如沿运输方向的不同位置。例如,载送基板或掩模的载体可被悬浮,即通过抵消重力的力悬浮,并且在被悬浮时可在与平行于重力的方向不同的方向上移动。
53.示例性地参考图5,描述了根据本公开内容的用于竖直地处理基板的基板处理系统200。在本公开内容中,“基板处理系统”可被理解为被构造用于基板处理、特别是用于在基板上的材料沉积的系统。
54.根据可与本文描述的任何其他实施方式组合的多个实施方式,基板处理系统200包括至少一个根据本文描述的任何实施方式的腔室,即腔室210。另外,基板处理系统200可包括一个或多个另外的腔室,例如,直列布置的一个或多个另外的真空腔室。因此,基板处理系统可以是直列处理系统。特别地,“直列处理系统”可被理解为直列布置的两个或更多个模块的布置。模块可以是或包括腔室。
55.另外,直列处理系统可被构造用于在竖直基板上的一个或多个层的沉积。因此,基板处理系统可以是竖直基板处理系统,即,被构造用于处理呈实质上竖直的基板取向的基板。例如,可在静态沉积工艺或动态沉积工艺中沉积一个或多个层。沉积工艺可以是pvd工艺(例如溅射工艺)或cvd工艺。又进一步,应当注意,通常基板处理系统是具有被构造用于提供真空条件的一个或多个腔室的真空处理系统。
56.基板处理系统可包括大气模块。特别地,如图5示例性地所示,大气模块可包括摆动模块201。典型地,摆动模块201被构造为用于将基板从水平位置处理到实质上竖直的位置。此外,处理系统可包括装载锁定模块202。装载锁定模块在本文中也可称为“预真空模块”。
57.另外,处理系统可包括传送模块203。传送模块203可以是高真空模块。另外,如图4示例性地所示,基板处理系统100典型地包括处理模块204。
58.应当理解,装载锁定模块202、传送模块203和处理模块204典型地被构造用于在相应模块中提供真空条件。
59.如图5示例性地所示,根据可与本文描述的其他多个实施方式组合的多个实施方式,摆动模块201可连接到装载锁定模块202。装载锁定模块202可连接到传送模块203并且传送模块203可连接到处理模块204。如图5示例性地所示,模块可经由栅阀115连接。在本公开内容中,“栅阀”可被理解为允许对相邻模块或腔室的真空密封的口。
60.装载锁定模块或腔室可有助于均衡在模块之间的压强差。例如,在一个模块中施加大气压强,并且在经由装载锁定模块连接到一个模块的模块中施加真空。
61.如图5示例性地所示,基板处理系统典型地包括沿第一运输路径t1设置的第一运输系统101以用于运输载体10。另外,基板处理系统典型地包括沿从第一运输路径t1水平地偏移的第二运输路径t2设置的第二运输系统102。第一运输路径t1和第二运输路径t2也可称为第一轨道和第二轨道。
62.例如,第一轨道可以是被构造用于例如从基板处理系统的入口朝向基板处理腔室运输未处理基板的轨道。第二轨道可以是被构造用于例如从基板处理腔室朝向基板处理系统的出口运输经处理基板的轨道。第一轨道和第二轨道也可分别称为基板运输轨道。“轨道”可被理解为引导结构,例如导轨,以用于沿基板运输方向引导基板。因此,“轨道”可被理解为机械结构。另外,应当注意,基板运输系统可以是非接触运输系统,例如基于磁悬浮。
63.例如,可提供第一轨道以用于将未处理基板朝向处理模块(也称为基板处理腔室)运输。可提供第二轨道以用于将经处理基板从处理模块朝向气氛(atmospheric)模块运输。通常,第二轨道相对于第一轨道侧向地移位。例如,第一轨道和第二轨道可实质上平行于彼此。因此,应当理解,基板运输系统可被构造用于将一个或多个基板从气氛模块通过一个或多个传送模块运输到一个或多个处理模块,反之亦然。
64.如图5示例性地所示,根据可与本文描述的其他多个实施方式组合的多个实施方式,处理模块204包括具有路径切换组件150的腔室210。尽管未明确地示出,但是应当理解,处理系统可包括一个或多个另外的腔室或模块,该一个或多个另外的腔室或模块包括路径切换组件150。
65.示例性地参考图6a和图6b,描述了根据本公开内容的切换载体的运输路径的方法300。根据可与本文描述的任何其他实施方式组合的多个实施方式,该方法包括将载体从第
一运输系统101移交到一个或多个可枢转载体传送元件152(由图6a中的框301表示),特别是根据本文描述的任何实施方式的路径切换组件的一个或多个可枢转载体传送元件。另外,该方法包括将一个或多个可枢转载体传送元件152从第一运输系统101枢转到第二运输系统102(由图6a中的框302表示)。另外,该方法包括将载体从一个或多个可枢转载体传送元件152移交到第二运输系统102(由图6a中的框303表示)。
66.根据可与本文描述的任何其他实施方式组合的多个实施方式,将载体从第一运输系统101移交到一个或多个可枢转载体传送元件152包括减小作用在第一运输系统与载体之间的磁力。通过减小作用在第一输送系统与载体之间的磁力,可降低载体,即,可降低载体的竖直位置。因此,可建立在一个或多个可枢转载体传送元件152与载体之间的机械接触,使得可通过枢转一个或多个可枢转载体传送元件152来将载体从第一运输系统101传送到第二运输系统102。
67.根据可与本文描述的任何其他实施方式组合的多个实施方式,将载体从一个或多个可枢转载体传送元件152移交至第二运输系统102包括增大作用在第二运输系统与载体之间的磁力。通过增加作用在第二输送系统与载体之间的磁力,可提升载体,即,提升载体的竖直位置。因此,可释放在一个或多个可枢转载体传送元件152与载体之间的机械接触。
68.应当理解,如本文所述,减小和/或增大作用在运输系统与载体之间的磁力可通过控制运输系统的电磁体来进行。
69.示例性地参考图6b,描述了一个或多个可枢转载体传送元件152的位置顺序,以用于将载体从第一运输系统101传送到第二运输系统102。特别地,在载体进入布置路径切换组件的腔室之前,第一可枢转载体传送元件152a的载体保持元件153位于位置p3,并且第二可枢转载体传送元件152b的载体保持元件153位于位置q3。如图6b所示,位置p3和q3从第一运输路径t1以及第二运输路径t2侧向地位移。
70.当第一可枢转载体传送元件152a的载体保持元件153处于位置p3并且第二可枢转载体传送元件152b的载体保持元件153处于位置q3时,载体可进入腔室。当载体设置在腔室中的第一运输路径t1上时,第一可枢转载体传送元件152a的载体保持元件153从位置p3移动到位置p1。因此,第二可枢转载体传送元件152b的载体保持元件153从位置q3移动到位置q1,特别是与第一可枢转载体传送元件152a的载体保持元件153同时地移动。
71.位置p1和位置q1与第一运输路径t1成直线。随后,载体向下移动,例如向下移动几毫米,特别是通过减小作用在第一运输系统与载体之间的磁力来进行这种移动。因此,将载体从第一运输系统移交到一个或多个可枢转载体传送元件152,特别是分别移交到第一可枢转载体传送元件152a的载体保持元件153和第二可枢转载体传送元件152b的载体保持元件153。然后,第一可枢转载体传送元件152a的载体保持元件153从位置p1移动到位置p3,并且第二可枢转载体传送元件152b的载体保持元件153从位置q1移动到位置q2。位置p2和q2与第二运输路径t2成直线。随后,将载体抬起,例如抬起几毫米,特别是通过增大作用在第二运输系统与载体之间的磁力来进行抬起。因此,将载体从一个或多个可枢转载体传送元件152移交到第二运输系统102。载体可由第二运输系统102运输出腔室并且将载体留在第二运输路径t2上。对此,应当理解,当载体在第二运输路径t2上离开腔室时,下一载体可同步地在第一运输路径t1上进入腔室。
72.示例性参考图7a和图7b,描述了根据本公开内容的处理基板的方法400。根据可与
本文描述的任何其他实施方式组合的多个实施方式,该方法包括将载送基板的载体从第一运输系统101移交到一个或多个可枢转载体传送元件152(由图7a中的框401表示),特别是根据本文描述的任何实施方式的路径切换组件的一个或多个可枢转载体传送元件。另外,方法300包括将一个或多个可枢转载体传送元件152从第一运输系统101枢转到处理位置pr(由图7a、图7b中的框402表示)。另外,方法300包括通过使用处理装置205来处理基板(由图7a中的框403表示)。
73.示例性地参考图7b,应当理解,处理基板的方法400可包括切换运输路径的方法300。特别地,应当理解,在将载体从第一运输系统101移交到在位置p1和q1的一个或多个可枢转载体传送元件152之后,一个或多个可枢转载体传送元件152可从位置p1和q1移动到位置p4和q4。位置p4和q4相对于第二运输路径t2侧向地偏移。典型地,位置p4和q4在平行于第二运输路径t2的线上。在位置p4和q4之间延伸的线可被称为处理位置pr。在处理之后,载体可从处理位置pr移动到第二运输路径t2并移交到第二运输系统102。
74.示例性地参考图8的流程图,描述了根据本公开内容的多个实施方式的制造期间的方法500。根据可与本文描述的任何其他实施方式组合的多个实施方式,方法500包括使用根据本文描述的任何实施方式的路径切换组件150(由图8中的框501表示)、根据本文描述的任何实施方式的腔室210(由图8中的框502表示)、根据本文描述的任何实施方式的基板处理系统200(由图8中的框503表示)和根据本文描述的任何实施方式的处理基板的方法400(由图8中的框504表示)中的至少一者。
75.鉴于以上内容,应当理解,与现有技术相比,本公开内容的多个实施方式有益地提供一种路径切换组件和用于该路径切换组件方法,提供了更短的节拍时间、更低的成本和更简单的实现方式。因此,通过在基板处理系统中、特别是在基板处理系统的处理腔室中采用如本文描述的路径切换组件和方法,可减少处理系统的节拍时间和成本。
76.虽然前述内容针对的是多个实施方式,但是在不脱离基本范围的情况下,可设想多个其他和进一步实施方式,并且范围由所附权利要求书的范围确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。