1.本技术涉及基板处理装置和基板处理方法。
背景技术:
2.已知有具有多个处理装置的涂覆机/显影装置。例如,在专利文献1中记载的涂覆机/显影装置中,从分度器部上载置的装载盒取出的多个基板依次投入清洗装置,然后,依次经过脱水烘烤装置、抗蚀剂涂覆装置、预烘烤装置、曝光装置、显影装置和后烘烤装置,重新收容在装载盒中。
3.该涂覆机/显影装置中混合存在以下两种处理装置。即,混合存在依次处理装置和同时处理装置。依次处理装置将基板沿一方向依次搬运并对基板一张一张地进行处理。作为该依次处理装置,例示清洗装置和显影装置。同时处理装置中一并搬入多个张基板。同时处理装置对多个张基板一并进行处理。作为该同时处理装置,例如例示脱水烘烤装置。该脱水烘烤装置中作为多个处理部设置有加热部和冷却部。
4.专利文献1:日本特开2020-17604号公报
5.为了确认基板处理装置中的处理是否适当地进行,分别在依次处理装置和同时处理装置中,可以设置测量处理相关的参数的传感器。例如,在脱水烘烤装置中,可以设置温度传感器来测量基板的温度作为该参数。
6.基板处理装置可以将由各传感器测量的参数与基板相关联并收集。换言之,基板处理装置可以针对每个基板收集参数。通过基板处理装置将对各个基板的处理参数通知操作者,操作者能够确认对各个基板的处理参数。
7.但是,针对每个基板收集参数不一定是最佳的。例如,若将测量的参数与各个基板单独地关联并收集,则收集数据的数据量会变大。
技术实现要素:
8.因此,本技术的目的在于,提供一种能够更适当地收集参数的技术。
9.基板处理装置的第一方式,包括:同时处理部,能够一并处理n(n是2以上的整数)张基板;搬运部,向所述同时处理部一并搬运n张以下的所述基板;第一传感器,设置在所述同时处理部,测量与所述同时处理部的处理相关的第一参数;以及控制部,在所述同时处理部中从所述搬运部搬入n张基板的情况下,将在所述同时处理部对该n张基板的处理中由所述第一传感器测量的所述第一参数,与该n张基板相关联并存储,在所述同时处理部中从所述搬运部搬入m(m是1以上且小于n的整数)张基板的情况下,将在所述同时处理部对该m张基板的处理中由所述第一传感器测量的所述第一参数,与该m张基板相关联并存储。
10.基板处理装置的第二方式是涉及第一方式的基板处理装置,包括:依次处理部,包括能够一并搬入n张基板的基板导入部,从所述基板导入部依次搬运该基板,并且对该基板依次进行处理;以及第二传感器,设置在所述依次处理部,测量与所述依次处理部的处理相关的第二参数,所述控制部将在所述依次处理部的处理中由所述第二传感器检测的所述第
二参数,与该基板单独地关联并存储。
11.基板处理方法包括:将n(n
は
2以上的整数)张基板一并搬入同时处理部的工序;所述同时处理部对该n张基板一并进行处理的工序;在所述同时处理部对该n张基板的处理中,由第一传感器测量与所述同时处理部的处理相关的第一参数的工序;从所述同时处理部取出该n张基板的工序;将m(m是1以上且小于n的整数)张基板一并搬入所述同时处理部的工序;所述同时处理部对该m张基板一并进行处理的工序;在所述同时处理部对该m张基板的处理中由所述第一传感器测量所述第一参数的工序;从所述同时处理部取出该m张基板的工序;以及将在所述同时处理部对该n张基板的处理中由所述第一传感器测量的所述第一参数,与该n张基板相关联并存储,将在所述同时处理部对该m张基板的处理中由所述第一传感器测量的所述第一参数,与该m张基板相关联并存储的工序。
12.根据基板处理装置的第一方式和基板处理方法,同时处理部能够一并处理n张基板。在同时处理部一并处理多个基板的情况下,与在不同的处理时刻处理基板的情况相比,第一参数的基板间的偏差小,例如几乎相同。
13.若向同时处理部搬入n张基板,则第一参数与n张基板相关联并存储,若向同时处理部搬入m张基板,则第一参数与m张基板相关联并存储。即,第一参数与向同时处理部搬入的基板的组相关联并存储,而不是与各个基板单独相关联。由此,能够与基板的张数的变动相对应,并且与将第一参数与各个基板单独地相关联并存储的情况相比,能够用更少的额数据量适当地收集第一参数。
14.根据基板处理装置的第二方式,在依次处理部中依次搬运基板并且对基板依次进行处理。由此,基板在彼此不同的时刻进行处理。由此,第二参数的基板间的偏差较大。这种第二参数与基板单独地相关联并存储,因此,可以在不丢失基板w间的偏差的信息的情况下收集参数。
附图说明
15.图1是概略地表示基板处理装置的构成的一例的俯视图。
16.图2是概略地表示依次处理装置的构成的一例的侧视图。
17.图3是概略地表示同时处理装置的构成的一例的俯视图。
18.图4是概略地表示控制部的构成的一例的功能框图。
19.图5是示意性地表示依次收集数据的一例的图。
20.图6是示意性地表示依次收集数据的一例的图。
21.图7是示意性地表示同时收集数据的一例的图。
22.图8是示意性地表示装载盒中收容有多个基板的情形的图。
23.图9是示意性地表示装载盒中收容有多个基板的情形的图。
24.图10是概略地表示同时处理装置的构成的一例的俯视图。
25.图11是示意性地表示同时收集数据的一例的图。
26.图12是示意性地表示同时收集数据的一例的图。
27.图13是表示同时处理装置的动作的一例的流程图。
28.其中,附图标记说明如下:
29.1基板处理装置
30.30依次处理部(依次处理装置)
31.40同时处理部(同时处理装置)
32.60控制部
33.81搬运部(搬运机械手)
34.95、96第一传感器(温度传感器)
35.345、359、364第二传感器(流量传感器)
36.357、358第二传感器(压力传感器)
37.w基板
具体实施方式
38.以下,参照附图对实施方式进行说明。应当注意的是,附图是概略地表示的图,并且为了便于说明,对构成适当地进行了省略和简化。此外,附图中所示的构成的尺寸和位置之间的相互关系不一定是准确地描述的关系,而可以是适当地改变的关系。
39.此外,在以下所示的说明中,相同的构成要素标注相同的附图标记,并且它们的名称和功能也相同。因此,可以省略对它们的详细说明以避免重复。
40.此外,即使在以下描述中可能使用“第一”或“第二”等序数,但这些术语是为了便于理解实施方式的内容而使用的,并且不限于因这些序数而可能出现的顺序等。
41.除非另有说明,否则表示相对的或绝对的位置关系的表述(例如,“在一方向上”、“沿一方向”、“平行”、“正交”、“中心”、“同心”、“同轴”等)不仅严格地表示其位置关系,而且还表示在公差范围内或者在能够获得相同功能的范围内角度或距离上相对地发生位移的状态。除非另有说明,否则表示相等状态的表述(例如,“相同”、“相等”、“等质”等)不仅表示数量上严格相等的状态,而且还表示存在公差或者存在能够获得相同功能的差异的状态。除非另有说明,否则表示形状的表述(例如,“方形”或“圆筒形”等)不仅严格地几何表示其形状,而且还表示在能够获得相同效果的范围内具有例如凹凸或倒角等的形状。“包括”、“具备”、“包含”或“具有”一个构成要素的表述不是排除其他构成要素的存在的排他性表述。表述“a、b和c中的至少任一个”包括仅a,仅b,仅c,a、b和c中的任意两个,和a、b和c全部。
42.《1.基板处理装置的整体构成
·
整体动作》
43.图1是概略地表示基板处理装置1的构成的一例的图。在图1的例子中,基板处理装置1是涂覆机/显影装置,主要包括清洗装置12、脱水烘烤装置13、涂覆关联装置14、预烘烤装置15、显影装置17和后烘烤装置18的各处理装置。此外,在基板处理装置1的一侧配置有对基板处理装置1搬入、搬出基板的分度器部11。而且,在基板处理装置1的另一侧通过未图示的接口部配置有曝光装置16。
44.从分度器部11到曝光装置16的路径上依次地配置有清洗装置12、脱水烘烤装置13、涂覆关联装置14和预烘烤装置15。从曝光装置16到分度器部11的返回路径上依次地配置有显影装置17和后烘烤装置18。
45.分度器部11载置有用于收纳多个基板的多个装载盒(未图示)。基板例如是液晶显示装置中使用的矩形玻璃基板。分度器部11配置有作为搬运基板的搬运部一例的分度器机械手(未图示)。分度器机械手从装载盒中取出基板,并将该基板搬运到清洗装置12。在清洗装置12中,对基板进行清洗处理。进行了清洗处理的基板被搬运到脱水烘烤装置13。在脱水
烘烤装置13中,通过加热来进行脱水处理(脱水烘烤处理)。进行了脱水烘烤处理的基板被搬运到涂覆关联装置14,进行包括抗蚀剂涂覆处理的各种处理。进行了该处理的基板被搬运到预烘烤装置15进行加热处理。进行了加热处理的基板被搬运到曝光装置16进行曝光处理。
46.进行了这些处理的基板被搬运到显影装置17进行显影处理。进行了显影处理的基板被搬运到后烘烤装置18进行加热处理。之后,该基板通过分度器机械手被容纳在载置于分度器部11的装载盒中。通过上述一系列处理,在基板的表面上形成抗蚀剂图案。
47.以下,当在第二处理之前进行第一处理时,进行第一处理的装置被描述为位于进行第二处理的装置的“上游”,进行第二处理的装置被描述为位于进行第一处理的装置的“下游”。分度器部11位于清洗装置12的上游且位于后烘烤装置18的下游。术语“上游”和“下游”不仅用于装置和构成该装置的各种要素,而且还用于描述待搬运的基板的位置关系。
48.《2.处理装置的种类》
49.在该基板处理装置1中,作为处理装置的种类,混合存在以下两种处理装置。即,沿一方向依次地搬运基板并对该基板一张一张地进行处理的依次处理装置(平流处理装置)、和能够同时对n(2以上的整数)张基板一并进行处理的同时处理装置混合存在。需要说明的是,同时处理装置对n张基板的处理期间不需要完全一致,只要各个处理期间的至少一部分重叠即可。简而言之,这里所说的同时可以用作与各个处理期间完全不重叠的状态相对的含义。作为依次处理装置,示例清洗装置12和显影装置17,作为同时处理装置,示例脱水烘烤装置13、涂覆关联装置14、预烘烤装置15和后烘烤装置18。
50.依次处理装置可以看作是作为基板处理装置1的一部分的依次处理部。同时处理装置可以看作是作为基板处理装置1的一部分的同时处理部。
51.《2-1.依次处理装置》
52.图2是概略地表示依次处理装置30的构成的一例的图。依次处理装置30包括处理装置主体32和基板导出部33,在依次处理装置30之前设置有基板导入部(接受部)31。基板导入部31一并接受从上游装置搬运来的多个(n张)基板w。处理装置主体32一张一张地依次接收从基板导入部31搬运来的多个基板w,沿一方向(搬运方向:图2中从左侧向右侧的方向)搬运该基板w,并且对基板w进行各种处理。处理后的基板w从处理装置主体32被搬运到基板导出部33。基板导出部33依次接收从处理装置主体32搬运来的多个基板w。基板导出部33可以保持依次接收的多个(n张)基板w。多个基板w从基板导出部33一并取出并搬运到下游装置。需要说明的是,可以认为基板导入部31包括在依次处理装置30中。基板导入部31可以用作依次处理装置30的入口部,基板导出部33可以用作依次处理装置30的出口部。以下,举例说明n=2的情况。
53.《2-1-1.基板导入部31》
54.基板导入部31具有作为搬运机构的多个辊311、多个辊313和传感器314、315。辊311、313的截面呈圆形,辊311、313被设置为其中心轴与基板w的搬运方向大致垂直且大致水平。这里所说的搬运方向是指依次处理装置30中的基板w的搬运方向。多个辊311沿搬运方向隔开间隔并排设置。各个辊311可以以自身的中心轴为旋转轴旋转。各个辊311在中心轴上的两端分别可旋转地固定在支撑板(未图示)上。该一对支撑板是沿搬运方向延伸的板状构件,其固定在设置于地面的规定的架台312上。多个辊313沿搬运方向隔开间隔并排设
置。辊313位于辊311的下游侧,并且设置在与辊311相同的高度。各个辊313可以以自身的中心轴为旋转轴旋转。各个辊313在中心轴上的两端分别可旋转地固定在支撑板上。
55.多个辊311由驱动部(未图示)驱动,并且以大致相等的旋转速度沿预定的相同方向旋转(同步旋转)。驱动部具有马达。在多个辊311上载置基板w。基板w以其主面的法线方向沿铅垂方向(图2中的上下方向)的方式载置。在此状态下,多个辊311沿相同方向同步旋转,使得基板w在辊311上沿搬运方向向处理装置主体32移动。多个辊313也由驱动部(未图示)驱动而同步旋转。由于辊311、313由不同的驱动部驱动,因此它们彼此被独立地控制。
56.在辊311、313上一张一张地载置基板w。例如,来自分度器部11的两张基板w可以载置在辊311、313上。在此状态下,通过仅辊313同步旋转,能够将辊313上的基板w向处理装置主体32搬运。接着,通过辊311、313均同步旋转,能够将辊313上的基板w向处理装置主体32搬运。
57.传感器314检测在辊311上的停止位置是否存在基板w。传感器315检测在辊313上的停止位置是否存在基板w。传感器314、315例如是光学传感器,并且当接收到来自基板w的反射光时检测基板w。传感器314、315的检测结果被输出到控制部60。
58.以下,将两张基板w中的一个也称为基板w1,另一个也称为基板w2。这里,假设基板w1位于基板w2的上游侧。
59.《2-1-2.基板导出部33》
60.基板导出部33能够保持从处理装置主体32依次搬运来的多个(n张)基板w。基板导出部33能够保持的基板w的张数与接下来的同时处理装置40(例如若依次处理装置30是清洗装置12,则为脱水烘烤装置13)中能够处理的基板w的张数相同。这里,作为一例,假设基板导出部33保持两张基板w,同时处理装置40同时对两张基板w进行处理。
61.基板导出部33包括作为搬运机构的多个辊331、多个辊332和传感器334、335。辊331、332的截面呈圆形。辊331以其中心轴与基板w的搬运方向垂直且水平的方式沿搬运方向隔开间隔配置。辊332配置在辊331的下游侧。辊332以与辊331相同的姿势沿搬运方向隔开间隔配置。各个辊331、332的中心轴上的两端分别可旋转地固定在支撑板(未图示)上。多个辊331通过驱动部(未图示)同步旋转,多个辊332通过驱动部(未图示)同步旋转。由于辊331和辊332由不同的驱动部驱动,因此它们能够被彼此独立地控制。各个驱动部例如具有马达。
62.辊331、332被设置在彼此相同的高度。基板w从处理装置主体32被搬运到辊331,并且从辊331适当地被搬运到辊332。如后所述,一张基板w停止在辊331上,一张基板w停止在辊332上。由此,基板导出部33能够保持两张基板w。
63.传感器334检测在辊331上的停止位置是否存在基板w。传感器335检测在辊332上的停止位置是否存在基板w。传感器334、335例如是光学传感器,并且当接收到来自基板w的反射光时检测基板w。传感器334、335的检测结果被输出到控制部60。
64.基板导出部33能够从处理装置主体32依次地接收并保持两张基板w。以下,为了方便起见,首先对一并处理两张基板w的情况进行说明。对于不是一并处理n张基板w的情况将在后面详细说明。
65.首先,通过辊331、332同步旋转,第一张基板w被搬运到辊332上的停止位置。具体来说,当传感器334、335均未检测到基板w时,使辊331、332同步旋转,以将来自处理装置主
体32的基板w搬运到基板导出部33。然后,当传感器335检测到基板w时,停止辊332的同步旋转。由此,第一张基板w(下游侧的基板w2)停止并支撑在辊332上。对于第二张基板w(上游侧的基板w1),通过使辊331同步旋转而辊332不旋转,将该基板w搬运到辊331的停止位置。具体来说,当传感器334检测到基板w时,停止辊331的同步旋转。即,当传感器334、335均检测到基板w时,停止辊331的同步旋转。由此,第二张基板w停止并支撑在辊331上。如此,基板导出部33能够保持两张基板w。
66.《2-1-3.处理装置主体32》
67.处理装置主体32具有作为搬运机构的多个辊321。多个辊321具有与辊311相同的形状,并且以与辊311相同的姿势配置。辊321的中心轴上的两端分别可旋转地固定在支撑板(未图示)上。多个辊321沿搬运方向隔开间隔排列。多个辊321设置在与基板导入部31的辊311相同的高度,基板w能够从辊311依次地经由辊313、321、331移动到辊332。
68.对于在辊321上移动的基板w,处理装置主体32在其搬运方向的各个位置上适当地进行处理。这里,作为依次处理装置30,以清洗装置12为例进行说明。例如,处理装置主体32具有药液部34、水洗部35和除水部36。药液部34、水洗部35和除水部36从上游向下游依次地串联设置。此外,多个辊321在药液部34、水洗部35和除水部36的范围内设置。多个辊321由驱动部(未图示)驱动而同步旋转。由此,能够将基板w沿搬运方向搬运,使其依次地通过药液部34、水洗部35和除水部36。
69.药液部34是通过向辊321上的基板w供给药液来清洗基板w的装置。药液部34包括用于喷出药液的多个喷嘴341、用于储存药液的药液槽342、连接药液槽342和喷嘴341的供给管343、和通过供给管343将药液供给到喷嘴341的泵344。喷嘴341在铅垂方向上设置在基板w的两侧,向基板w的两面供给药液。供给管343设置有流量传感器345,有助于控制供给的药液的量。药液部34可以具有用于刷洗基板w的刷子(未图示)等。通过将药液供给到基板w并且进行刷洗,能够提高清洗效果。供给到基板w的药液主要从基板w的边缘掉落,被回收到药液槽342中。
70.水洗部35是通过向基板w供给清洗水来冲洗残留在基板w上的药液的装置。水洗部35具有用于储存清洗水的第一水槽355和第二水槽356。此外,水洗部35具有从上游向下游依次配置的低压水供给部351、高压水供给部352、超声波清洗水供给部353和纯水供给部354。与药液部34相同地,各部351~354包括用于向基板w喷出液体的喷嘴、连接到该喷嘴的供给管、和通过该供给管向该喷嘴供给液体的泵。
71.低压水供给部351的泵35t是低压泵,其以低压从第一水槽355抽取清洗水并将其供给到喷嘴。由此,低压水供给部351可以以低压向基板w供给清洗水。低压水供给部351设置有狭缝喷嘴(也称为液刀)35a,清洗水也从液刀35a供给到基板w。供给到低压水供给部351的清洗水的压力由压力传感器357测量。
72.高压水供给部352的泵35r是高压泵,其以高压从第一水槽355抽取清洗水并将其供给到喷嘴。由此,高压水供给部352可以以高压向基板w供给清洗水。供给到高压水供给部352的清洗水的压力由压力传感器358测量。由低压水供给部351和高压水供给部352供给的清洗水主要从基板w的边缘掉落并回收到第一水槽355中。
73.超声波清洗水供给部353的喷嘴35b设置有超声波振动件,所述超声波振动件用于对来自第二水槽356的清洗水施加超声波振动。喷嘴35b用作液刀。超声波清洗水供给部353
的泵35s从第二水槽356抽取清洗水并将其供给到喷嘴35b。通过喷嘴35b的超声波振动件振动,超声波清洗水供给部353从喷嘴35b向基板w供给振动状态的清洗水。由超声波清洗水供给部353供给的清洗水主要被回收到第二水槽356中。供给到喷嘴35b的清洗水的流量由流量传感器359测量。
74.纯水供给部354的喷嘴向基板w供给从纯水供给源365供给的纯水。纯水供给源365例如作为工厂设备(公用设备)而设置。该纯水主要被回收到第二水槽356中。
75.除水部36是通过使高压气流流动到基板w而从基板w吹掉水的装置。除水部36具有向基板w喷射气体的喷射部(干燥气刀)361、供给气体的气体供给源362、和连接喷射部361和气体供给源362的管道363。管道363中设置有用于测量该气体的流量的流量传感器364。气体供给源362是作为工厂设备(公用设备)而设置的气体源。
76.如上所述,在处理装置主体32中基板w沿搬运方向被搬运,并且在各个位置上进行各种处理。由处理装置主体32进行了全部处理的基板w被搬运到基板导出部33。
77.《3.同时处理装置40》
78.图3是概略地表示同时处理装置40的构成的一例的图。这里,将脱水烘烤装置13作为同时处理装置40为例进行说明。图3是表示铅垂向下观察脱水烘烤装置13的构成的一例的概略图。
79.《3-1.脱水烘烤装置13》
80.脱水烘烤装置13包括加热部82和冷却部83。该脱水烘烤装置13从搬运机械手(搬运部)81接收由(作为依次处理装置30的)清洗装置12进行了清洗处理的基板w,并对接收的基板w同时进行处理。脱水烘烤装置13可以对多张(n张)基板w同时进行处理。以下,为了简单起见,首先对一并处理两张基板w的情况进行说明。对于不是一并处理n张基板w的情况将在后面详细说明。
81.《3-1-1.搬运机械手81》
82.搬运机械手81具有手部h1、移动机构51、升降机构52和旋转机构53。移动机构51可以使手部h1在水平面内移动。例如,移动机构51具有一对臂(未图示)。各个臂具有多个长条形的连接构件,该连接构件的端部彼此可旋转地连接。各个臂的一端连接到手部h1,另一端连接到升降机构52。通过控制连接构件的连接角度,能够使手部h1在水平面内移动。升降机构52通过沿铅垂方向升降臂来升降手部h1。升降机构52例如具有滚珠丝杠机构。旋转机构53可以使升降机构52以沿铅垂方向的旋转轴作为中心旋转。由此,手部h1沿周向转动。通过该转动,可以改变手部h1的朝向。旋转机构53例如具有马达。
83.在手部h1以在一水平方向(图3中的左右方向)上并排的状态放置两张基板w。手部h1例如具有多根指状构件f1、和将指状构件f1的基端彼此连接的基端构件p1。该基端构件p1连接有上述臂的一端。指状构件f1具有长条形的形状,在其上表面载置有基板w。该两张基板w沿指状构件f1的长边方向(图3中的左右方向)并排载置。因此,指状构件f1的长边方向的长度根据两张基板w的长度和基板w之间的间隔来设定。
84.搬运机械手81通过适当地移动和旋转手部h1,能够将手部h1分别移动到加热部82、冷却部83、清洗装置12的基板导出部33、和下个工序中的涂覆关联装置14(图3中未表示)。搬运机械手81可以分别从基板导出部33、加热部82和冷却部83一并取出两张基板w,或者将两张基板w一并分别交接到加热部82、冷却部83和涂覆关联装置14。
85.例如,搬运机械手81按照如下方式从基板导出部33一并取出两张基板w。即,搬运机械手81将手部h1移动到基板导出部33,以使手部h1位于由基板导出部33保持的两张基板w的下方。
86.需要说明的是,辊331、332构成为避免与搬运机械手81的手部h1发生碰撞。然后,搬运机械手81通过使手部h1向铅垂上方上升,能够通过手部h1提起两张基板w。由此,两张基板w分别从辊331、332分离。两张基板w沿手部h1的长边方向隔开间隔并排载置在手部h1上。两张基板w以其主面的法线方向沿铅垂方向的姿势载置在手部h1上。
87.两张基板w也可以沿手部h1的横向方向(短边方向)隔开间隔并排载置在手部h1上。这种载置方式例如通过设置转台并将基板w旋转90度来实现。
88.接着,搬运机械手81通过以远离基板导出部33的方式移动手部h1,从基板导出部33一并取出两张基板w。
89.需要说明的是,在指状构件f1的上表面(载置基板w的表面)可以形成有多个吸引口。该吸引口设置在与两张基板w相对的位置,从该吸引口抽出空气以吸引基板w。由此,能够提高用于保持基板w的保持力。
90.搬运机械手81通过与上述动作相同的动作,分别从加热部82和冷却部83一并取出两张基板w。一方面,搬运机械手81按照与上述动作相反的顺序,将两张基板w一并交接到各个加热部82、冷却部83和涂覆关联装置14(以下,称为各部)。即,搬运机械手81将载置有两张基板w的手部h1移动到各部的内部,降低手部h1以将两张基板w一并载置在各部的基板保持部的上表面。需要说明的是,各部的基板保持部构成为在搬入搬出两张基板w时避免与手部h1发生碰撞。然后,搬运机械手81将手部h1从各部的内部移动到外部。由此,两张基板w被一并交接到各部。
91.如上所述,搬运机械手81能够在一水平方向上并排保持由作为依次处理装置的清洗装置12处理的多个基板w中的n张(两张)基板w,并且将该n张(两张)基板w一并搬运到作为同时处理装置的脱水烘烤装置13。通过一并搬运多张基板w,与一张一张地搬运基板w的情况相比,能够提高搬运动作的处理能力。
92.《3-1-2.加热部82》
93.来自搬运机械手81的两张基板w一并交接到加热部82。该加热部82包括在水平方向上并排保持该两张基板w的基板保持部91、和一并对该两张基板w同时进行加热处理的加热单元92。换言之,加热部82对两张基板w同时进行加热处理。
94.基板保持部91具有支撑两张基板w的下表面的构件。两张基板w通过载置在该构件上而被保持。两张基板w以其主面的法线方向沿铅垂方向的姿势放置。例如,基板保持部91包括多个升降销(未图示)。该多个升降销在其顶端从基板保持部91的上表面突出的上位置和退回到上表面下方的下位置之间升降。搬运机械手81将两张基板w交接到向上突出的多个升降销,然后从加热部82退回。多个升降销在支撑两张基板w的状态下下降,将两张基板w载置在基板保持部91的上表面。
95.加热单元92例如是加热器等,一并对由基板保持部91保持的两张基板w同时进行加热处理。通过该加热处理,例如能够使残留在基板w上的纯水蒸发(脱水处理)。通过一并对多张基板w同时进行加热处理,与对基板w一张一张地进行加热处理的情况相比,能够提高加热处理的处理能力。
96.加热机构92例如可以内置在基板保持部91中。此外,加热部82可以设置有多个加热机构92。多个加热机构92可以在俯视下彼此相邻地配置,并且彼此独立地控制。两张基板w例如载置在与多个加热机构92在铅垂方向上相对的位置。该情况下,能够将两张基板w的俯视下的多个区域内的温度根据每个该区域进行调整。若基板w的俯视下的尺寸变大,则很难通过单个加热机构92均匀地加热基板w,但是通过设置多个加热机构92,能够更均匀地加热基板w。
97.加热部82还可以包括测量基板w的温度的温度传感器95。加热部82可以设置有多个温度传感器95。各个温度传感器95测量俯视下彼此不同的区域的温度。例如温度传感器95可以与加热机构92一对一地设置。该情况下,温度传感器95测量对应的加热机构92的加热对象区域的温度。
98.由温度传感器95测量的温度输出到控制部60。控制部60例如可以基于由温度传感器95测量的测量温度,控制加热机构92。由此,能够使基板w的温度更均匀地接近目标值。
99.《3-1-3.冷却部83》
100.由加热部82加热的两张基板w从搬运机械手81一并交接到冷却部83。即,搬运机械手81将由作为依次处理装置的清洗装置12处理后由加热部82处理的两张基板w在一水平方向上并排保持,并且将该两张基板w一并搬运到冷却部83。该冷却部83包括在水平方向上并排保持该两张基板w的基板保持部93、和对该两张基板w一并进行冷却处理的冷却机构94。换言之,冷却部83对两张基板w同时进行冷却处理。
101.该基板保持部93具有支撑两张基板w的下表面的构件(未图示)。两张基板w通过载置在该构件上而被保持。两张基板w以其主面的法线方向沿铅垂方向的姿势载置。基板保持部93的结构与基板保持部91相同。
102.冷却机构94例如是使冷水流过形成在金属板内部的液路的冷却板等,对保持在基板保持部93的两张基板w一并进行冷却处理。冷却机构94由控制部60控制。通过该冷却处理,两张基板w被冷却,能够使两张基板w的温度变为适合下游侧的处理装置(涂覆关联装置14)的温度。通过一并对两张基板w同时进行冷却处理,与对基板w一张一张地进行冷却处理的情况相比,能够提高冷却处理的处理能力。
103.冷却机构94例如可以内置在基板保持部93中。此外,冷却部83可以设置有多个冷却机构94。多个冷却机构94可以在俯视下彼此相邻地配置,被彼此独立地控制。两张基板w例如载置在与多个冷却机构94在铅垂方向上相对的位置。该情况下,能够将基板w的俯视下的多个区域中的温度根据每个该区域调整。若基板w的俯视下的尺寸变大,则很难通过单个冷却机构94均匀地加热基板w,但是通过设置多个冷却机构94,能够更均匀地冷却基板w。
104.冷却部83还可以包括测量基板w的温度的温度传感器96。冷却部83可以设置有多个温度传感器96。各个温度传感器96检测俯视下彼此不同的区域的温度。例如温度传感器96可以与冷却机构94一对一地设置。该情况下,温度传感器96测量对应的冷却机构94的冷却象区域的温度。
105.由温度传感器96测量的温度输出到控制部60。控制部60例如可以基于由温度传感器96测量的测量温度,控制冷却机构94。由此,能够使基板w的温度更均匀地接近目标值。
106.需要说明的是,冷却部83也可以通过自然冷却来冷却两张基板w。自然冷却是指不使用动力(电力)来冷却加热的基板w,而将基板w放置来冷却。在这种情况下,不需要作为冷
却板等构成的冷却机构94。
107.《3-1-4.脱水烘烤装置的一系列处理》
108.接着,对脱水烘烤装置13的一系列处理进行简单说明。搬运机械手81从上游侧的清洗装置12的基板导出部33一并取出两张基板w,并将该两张基板w一并交接到加热部82。在该加热部82中,两张基板w也以在水平方向上并排的状态被保持。加热部82对该两张基板w一并进行加热处理。加热处理后的两张基板w由搬运机械手81一并取出,一并交接到冷却部83。在冷却部83中,两张基板w也以在水平方向上并排的状态被保持。冷却部83对该两张基板w一并进行冷却处理。进行了冷却处理的两张基板w由搬运机械手81一并取出,一并搬运到涂覆关联装置14。
109.《4.控制部》
110.如图1例示,基板处理装置1具有控制各个处理装置中的处理和基板的搬运的控制部60。图4是概略地表示控制部60的构成的一例的功能框图。
111.控制部60为控制电路,如图4所示,例如,由cpu(central processing unit:中央处理单元)61、rom(read only memory:只读存储器)62、ram(random access memory:随机存取存储器)63和存储装置64等通过总线65相互连接的通用计算机构成。rom62中存储基本程序等,ram63提供cpu61进行规定的处理时的作业区域。存储装置64由闪存或硬盘装置等非易失性存储装置构成。
112.此外,在控制部60中,输入部66、显示部67和通信部68也连接到总线65。输入部66由各种开关或触摸面板等构成,并且从操作者接收处理规程等各种输入设定指示。显示部67由液晶显示装置和灯等构成,并且在cpu61的控制下显示各种信息。通信部68具有经由lan(local area network:局域网)等的数据通信功能。
113.此外,各个机械手(诸如分度器机械手的搬运机械手等)和上述各个处理装置作为控制对象连接到控制部60。即,控制部60可以用作控制基板w的搬运的搬运控制部。
114.控制部60的存储装置64中存储用于控制构成基板处理装置1的各个装置的处理程序p。通过控制部60cpu61执行处理程序p,来控制基板的搬运动作和处理动作。此外,处理程序p可以存储在存储介质中。通过使用该存储介质,可以将处理程序p安装在控制部60(计算机)中。此外,控制部60执行的功能的一部分或全部不一定必须通过软件来实现,也可以通过专用逻辑电路等硬件来实现。
115.控制部60可以具有多层结构。例如,控制部60可以包括主控制部和多个末端控制部。末端控制部设置在例如分度器部11、清洗装置12、脱水烘烤装置13、涂覆关联装置14、预烘烤装置15、曝光装置16、显影装置17和后烘烤装置18的各个处理装置中。主控制部设置在基板处理装置1中,与多个末端控制部进行通信。主控制部管理基板处理装置1的整体动作,末端控制部控制对应的各个装置的动作。
116.多个末端控制部可以相互通信。例如,在末端控制部之间发送和接收与基板w相关的数据。与基板w相关的数据例如表示以组为单位的基板w的数据,表示基板w的处理内容的信息包含在该数据中。末端控制部基于从一个上游侧的末端控制部接收的基板w的数据,控制对应的装置并处理基板w。例如,清洗装置12的末端控制部从分度器部11的末端控制部接收基板w的数据,并且基板w以组为单位被搬入到清洗装置12。清洗装置12的末端控制部基于接收到的基板的数据来控制清洗装置12,并对搬入的基板w进行清洗处理。然后,基板w的
处理结束后,基板w以组为单位被搬运到脱水烘烤装置13,并且基板w的数据从清洗装置12的末端控制部传递到脱水烘烤装置13的末端装置。以下,以相同的方式进行处理。
117.《5.处理参数的收集》
118.如上所述,基板处理装置1设置有各种传感器(例如流量传感器345、359、364、压力传感器357、358和温度传感器95、96)。这些传感器可以说是测量与处理相关的参数的传感器。以下,有时将同时处理装置40(例如脱水烘烤装置13)中设置的传感器称为第一传感器,有时将依次处理装置30(例如清洗装置12)中设置的传感器称为第二传感器。
119.作为第一传感器,例示有温度传感器95、96。温度传感器95、96测量基板w的温度作为与处理相关的参数(第一参数)。作为第二传感器,例示有流量传感器345、359、364和压力传感器357、358。流量传感器345、359、364测量向基板w供给的流体的流量作为与处理相关的参数(第二参数)。压力传感器357、358测量向基板w供给的流体的压力作为与处理相关的参数(第二参数)。
120.控制部60将分别由第一传感器和第二传感器测量的参数与基板w相关联,并存储在非易失性存储介质(例如存储装置64)中。以下,对依次处理装置30和同时处理装置40分别说明参数的收集。以下,作为一例,对包括两张基板w的每组说明搬运和处理的情况。
121.《5-1.依次处理装置30的参数的收集》
122.如上所述,依次处理装置30的基板导入部31中一并搬入属于一个组的两张基板w。依次处理装置30将搬入的两张基板w一张一张地依次搬运且对各个基板w依次进行处理。具体来说,首先,搬运两张基板w中的下游侧的基板w2,由处理装置主体32对基板w2进行处理,并且接着搬运上游侧的基板w1,由处理装置主体32对基板w1进行处理。以下,以基板w2为代表进行说明。
123.在药液部34中,从喷嘴341向基板w2供给药液。由此,对基板w2进行与药液相应的处理。向基板w2供给的药液的流量由流量传感器345测量,表示该测量值的测量信号从流量传感器345输出到控制部60。
124.接着,基板w2搬运到水洗部35。在水洗部35中,基板w2首先搬运到低压水供给部351,从液刀35a向基板w2供给清洗水。向基板w2供给的清洗水的压力由压力传感器357测量,该测量信号从压力传感器357输出到控制部60。
125.接着,基板w2搬运到高压水供给部352,从高压水供给部352的喷嘴向基板w2供给清洗水。向基板w2供给的清洗水的压力由压力传感器358测量,该测量信号从压力传感器358输出到控制部60。
126.接着,基板w2搬运到超音波清洗水供给部353,从喷嘴35b向基板w2供给清洗水。向基板w2供给的清洗水的压力由流量传感器359测量,该测量信号从流量传感器359输出到控制部60。
127.接着,基板w2被搬运到纯水供给部354,从纯水供给部354的喷嘴向基板w2供给纯水。纯水供给部354可以设置检测向基板w2供给的纯水的流量的流量传感器,该情况下,该测量信号从该流量传感器输出到控制部60。
128.如上所述,在水洗部35中依次向基板w2供给清洗水和纯水,清洗基板w2。
129.接着,基板w2被搬运到除水部36,从除水部36的喷射部361向基板w2供给气体。由此,基板w2上附着的液体被吹飞。向基板w2供给的气体的流量由流量传感器364测量,该测
量信号从流量传感器364输出到控制部60。
130.控制部60将由流量传感器345、359、364测量的流量和由压力传感器357、358测量的压力与基板w2相关联,作为依次收集数据例如存储在存储装置64中。即,控制部60将在依次处理装置30对基板w2的处理中由第二传感器测量的参数,与基板w2相关联并存储在存储装置64中。
131.图5是示意性表示对基板w2的依次收集数据的一例的图。在图5的例子中,依次收集数据包括组识别信息da1、位置信息db1、处理信息dd1。组识别信息da1和位置信息db1是用于识别基板w的信息,在后面进行详述。处理信息dd1是表示由各个第二传感器测量的参数的测量值(所谓实测值)的信息。在图5的例子中,依次收集数据包括根据清洗装置12的流量传感器345、359、364和压力传感器357、358的五个处理信息dd1。在图5的例子中,测量值用“****”示意性地表示。
132.在上述例子中,对基板w2进行了描述,基板w1也相同。即,控制部60将在依次处理装置30对基板w1的处理中由第二传感器测量的参数,与基板w1相关联并例如存储在存储装置64中。图6是示意性表示对基板w1的依次收集数据的一例的图。在图6的例子中,对基板w1的依次收集数据也包括组识别信息da1、位置信息db1、处理信息dd1。
133.组识别信息da1是识别基板w的组的信息。组例如由n张(此处是两张)基板w1、w2构成。此处,基板w1、w2属于同一组,因此基板w1、w2的组识别信息da1彼此是同一个。在图5和图6的例子中,作为组识别信息da1表示有“对号k”。例如随着组识别信息da1的“k”值变大,表示组位于上游侧。位置信息db1是表示基板w的组内的位置的信息。此处,基板w2位于基板w1的下游侧,因此基板w2的位置信息db1(参照图5)表示“下游”,基板w1的位置信息db1(参照图6)表示“上游”。可以根据组识别信息da1和位置信息db1分别识别基板w。
134.在上述例子中,作为依次处理装置30说明了清洗装置12,但是其他依次处理装置30也相同。其他依次处理装置30也设置有测量与处理相关的参数的第二传感器。控制部60将在基板w2的处理中由第二传感器测量的参数与基板w2相关联并例如存储在存储装置64中。具体来说,控制部60将由其他依次处理装置30的第二传感器测量的表示参数的测量值的处理信息dd1,添加到基板w2的依次收集数据中。基板w1也相同。在图5和图6中,与其他依次处理装置30对应的处理信息dd1的存在,用纵向排列的黑圈示意性地表示。
135.如上所述,依次处理装置30中以组为单位搬入基板w,但是在依次处理装置30一张一张地搬运属于该组的基板w1、w2,一张一张地处理基板w1、w2。即,基板w1、w2在彼此不同的时刻单独地进行处理。例如,在基板w1之前,向基板w2从药液部34的喷嘴341供给药液,然后,向基板w1从喷嘴341供给药液。从喷嘴341喷出的药液的流量随着时间的流逝可能变动,向基板w1、w2供给的药液的流量可能彼此不同。即,即使是例如属于同一组的基板w1、w2,依次处理装置30中的参数可能彼此不同。因此,控制部60将依次处理装置30中测量的参数与基板w1、w2单独地相关联并存储。
136.《5-2.同时处理装置40中的参数的收集》
137.如上所述,同时处理装置40中也以组为单位一并搬入基板w。即,属于一组的两张基板w1、w2一并搬入同时处理装置40。然后,同时处理装置40一并处理搬入的两张基板w1、w2。
138.例如,加热部82中一并搬入两张基板w1、w2,加热部82一并加热两张基板w1、w2。作
为第一传感器的一例的温度传感器95测量基板w1、w2的温度,将该测量信号输出到控制部60。控制部60可以基于由温度传感器95测量的基板w1、w2的温度和加热温度的目标值,控制加热机构92。由此,能够使基板w1、w2的温度接近加热温度的目标值。基板w1、w2的温度控制为彼此几乎相同的值。
139.冷却部83中一并搬入两张基板w1、w2。冷却部83一并冷却两张基板w1、w2。作为第一传感器的一例的温度传感器96测量基板w1、w2的温度,将该测量信号输出到控制部60。控制部60可以基于由温度传感器96测量的基板w1、w2的温度和冷却温度的目标值,控制冷却机构94。由此,能够使基板w1、w2的温度接近冷却温度的目标值。基板w1、w2的温度控制为彼此几乎相同的值。
140.控制部60将在加热部82对基板w1、w2的加热处理中由温度传感器95测量的温度与基板w1、w2的组相关联,作为同时收集数据例如存储在存储装置64中。相同地,控制部60将在冷却部83对基板w1、w2的冷却处理中由温度传感器96测量的温度与基板w1、w2的组相关联,作为同时收集数据例如存储在存储装置64中。
141.图7是示意性表示同时收集数据的一例的图。在图7的例子中,同时收集数据包括组识别信息da1、基板有无信息de1、目标信息df1、处理信息dd1。基板有无信息de1是表示组的基板构成的信息。此处,基板w1、w2双方构成组,因此在图7的例子中,基板有无信息de1表示基板w1、w2双方的“两个基板”。
142.目标信息df1是与处理相关的参数的目标值。作为更具体的一例,目标信息df1分别表示加热部82中的基板w的目标温度、和冷却部83中的基板w的目标温度。在图7的例子中,加热部82中的目标信息df1和对温度传感器95的处理信息dd1上下相邻地表示,冷却部83中的目标信息df1和对温度传感器96的处理信息dd1也上下相邻地表示。在图7的例子中,测量值和目标值用“****”示意性地表示。
143.在上述例子中,作为同时处理装置40说明了加热部82和冷却部83,但是其他同时处理装置40也相同。其他同时处理装置40也设置有测量与处理相关的参数的第一传感器。控制部60将在同时处理装置40对基板w1、w2的处理中由第一传感器测量的参数,与基板w1、w2的组相关联并例如存储在存储装置64中。具体来说,控制部60将由其他同时处理装置40的第一传感器测量的表示参数的测量值的处理信息dd1,添加到基板w1、w2的同时收集数据中。此外,其他同时处理装置40的目标信息df1也可以添加到同时收集数据中。在图7的例子中,将与其他同时处理装置40对应的处理信息dd1和目标信息df1的存在用纵向排列的黑圈示意性地表示。
144.如上所述,同时处理装置40中以组为单位搬入基板w。然后,同时处理装置40以组为单位一并处理基板w。此处,同时处理装置40一并处理基板w1、w2。因此,与在不同时刻处理的依次处理装置30相比,同时处理装置40中的基板w1、w2的参数(例如温度)的偏差小,彼此几乎相同。因此,控制部60将同时处理装置40中测量的参数与基板w1、w2的组单独地相关联并存储。由此,与将该参数与基板w1、w2单独地相关联的情况相比,能够以更少的存储容量收集同时处理装置40中的参数。
145.《6.基板的欠缺》
146.在上述例子中,说明了一组中两张基板w1、w2都包括的情况。但是,在多组中的至少一组中,存在基板w1、w2中的一个欠缺的情况。以下,作为具体的一例,说明在基板处理装
置1中搬入的装载盒的内部,欠缺基板w1、w2中的一个的情况。
147.图8和图9是示意性表示装载盒10中多个基板w按照每组收容的情形的图。该装载盒10搬入分度器部11中。多个基板w在装载盒10中按照每组收容在彼此不同的收容位置(槽)。图8和9中不同的槽在图中位于上下。
148.在图8的例子中,各个槽中在左右方向上并排地容纳有两张基板w1、w2。分度器部11的分度器机械手从装载盒10的各个槽一并取出基板w1、w2,搬入清洗装置12。由此,各个槽与组对应。在图8的例子中,全部的槽中容纳有基板w1、w2,因此分度器机械手从任一槽中都一并取出两张基板w1、w2。该情况下,全部的组由两张基板w1、w2构成。
149.一方面,在图9的例子中,同时存在容纳有两张基板w的槽和仅容纳有一张基板w的槽。具体来说,在图9的例子中,从上起第二个槽,仅在左侧容纳有基板w1,从上起第五个槽仅在右侧容纳有基板w2。这些以外的槽,在左右方向上并排地容纳有两张基板w1、w2。该情况下,由分度器机械手从装载盒10取出的基板w的张数根据槽不同。
150.分度器机械手例如可以从上起依次从装载盒10的槽取出基板w。该情况下,分度器机械手首先从最上槽一并取出基板w1、w2并搬运到清洗装置12。该组由基板w1、w2构成。接着,分度器机械手从第二个槽取出一张基板w1并搬入清洗装置12。该组仅由基板w1构成。之后,相同地,分度器机械手从装载盒10的各个槽取出基板w并搬运到清洗装置12。此外,分度器机械手可以说是搬运n张(此处是两张)以下的基板w的搬运部。
151.在取出基板w1、w2双方的情况下,其一组由基板w1、w2构成。在仅取出基板w1的情况下,其一组仅由基板w1构成。即,该一组中欠缺基板w2。此外,在仅取出基板w2的情况下,其一组仅由基板w2构成。即,该一组中欠缺基板w1。
152.每次分度器机械手将装载盒10的基板w按照每个槽依次取出并搬运到清洗装置12,因此清洗装置12中有时一并搬入基板w1、w2,有时仅搬入基板w1,有时仅搬入基板w2。
153.控制部60能够获知装载盒10内的基板w的容纳情形。例如,表示装载盒10的各个槽的各个位置中是否存在基板w的容纳信息输入到控制部60。控制部60基于该容纳信息,能够获知各组的基板构成。容纳信息例如可以由操作者通过输入部66输入,来输入到控制部60,或者,也可以从基板处理装置1的上游侧的装置发送到控制部60,或者,也可以在基板处理装置1中设置检测装载盒10中是否存在基板w的传感器。
154.控制部60根据容纳信息,能够获知各组的基板构成(各个基板w1、w2的有无),因此通过基于容纳信息控制基板处理装置1,能够根据每组管理基板w的搬运和处理。此外,控制部60也可以使用清洗装置12的基板导入部31的传感器314、315的检测结果,获知组的基板构成。或者,在分度器机械手的手部设置有检测基板w是否存在的传感器的情况下,控制部60可以基于该传感器的检测结果,获知组的基板构成。
155.对包括基板w1、w2双方的组的搬运和处理如上所述。即,清洗装置12依次搬运基板w1、w2并且对基板w1、w2依次进行处理。然后,搬运机械手81在基板w1、w2双方被搬运到基板导出部33时,将基板w1、w2一并搬运到脱水烘烤装置13。脱水烘烤装置13一并处理基板w1、w2。具体来说,加热部82对搬入的基板w1、w2一并进行加热处理。若加热处理结束,则基板w1、w2由搬运机械手81一并搬运到冷却部83。冷却部83对搬入的基板w1、w2进行冷却处理。若冷却处理结束,则基板w1、w2由搬运机械手81搬运到下游侧的装置。之后,在该组中,基板w1、w2被搬运到其他同时处理装置40和其他依次处理装置30,在其他同时处理装置40和其
他依次处理装置30中进行处理。
156.一方面,例如在仅包括基板w2的组中,分度器机械手向清洗装置12的基板导入部31仅搬入基板w2。该基板w2载置在基板导入部31的辊313上,由传感器315检测。此外,基板导入部31可以一并搬入两张基板w1、w2,也可以搬入一张基板w。
157.控制部60使辊313同步旋转,将基板w2搬运到处理装置主体32。该基板w2在处理装置主体32中接受各种处理,搬运到基板导出部33的辊332。基板w2由基板导出部33的传感器335检测。该组中欠缺基板w1,因此搬运机械手81无需等待基板导出部33的传感器334的基板w1的检测,从基板导出部33取出基板w2,将基板w2搬运到脱水烘烤装置13(加热部82)。此外,搬运机械手81也可以称为搬运n张(此处是两张)以下的基板w的搬运部。
158.图10是概略地表示脱水烘烤装置13的构成的一例的俯视图。在图10的例子中,加热部82中仅搬入基板w2。加热部82仅对搬入的基板w2进行加热处理。若加热处理结束,则基板w2由搬运机械手81搬运到冷却部83。冷却部83仅对搬入的基板w2进行冷却处理。若冷却处理结束,则基板w2由搬运机械手81搬运到下游侧的装置。之后,在该组中,仅基板w2被搬运到其他同时处理装置40和其他依次处理装置30,在其他同时处理装置40和其他依次处理装置30中进行处理。仅包括基板w1的组也相同。
159.《6-1.参数的收集》
160.接着,对仅包括一张基板w的组的参数的收集进行描述。以下,以仅包括基板w2的组为代表进行说明。
161.如上所述,若仅基板w2搬入到清洗装置12的基板导入部31,则清洗装置12将搬入的基板w2搬运并且进行处理。该处理中,第二传感器(流量传感器345、359、364和压力传感器357、358)测量参数,该测量信号输出到控制部60。控制部60将由第二传感器测量的参数与基板w2相关联,作为依次收集数据例如存储在存储装置64中。对基板w2的依次收集数据与图5相同。
162.若基板w2到达基板导出部33,即,基板导出部33的传感器335检测出基板w2,则搬运机械手81将该一张基板w2从基板导出部33取出,搬运到加热部82。
163.加热部82仅对搬入的一张基板w2进行加热处理(参照图10)。该处理中,温度传感器95测量基板w2的温度,将该测量信号输出到控制部60。该情况下,控制部60将由温度传感器95测量的温度与一张基板w2相关联,同时作为收集数据例如存储在存储装置64中。图11是示意性地表示对仅包括基板w2的组的同时收集数据的一例的图。在图11的例子中,基板有无信息de1表示在组中仅存在下游侧的基板w2的“下游基板”。在图11的例子中,也相邻地表示有加热温度的目标信息df1、表示由温度传感器95测量的温度的处理信息dd1。
164.若加热部82的加热处理结束,则搬运机械手81从加热部82取出一张基板w2,搬运到冷却部83。冷却部83对搬入的一张基板w2进行冷却处理。在该处理中,第一传感器(温度传感器96)测量基板w2的温度,将该测量信号输出到控制部60。该情况下,控制部60将由温度传感器96测量的温度与一张基板w2相关联,同时作为收集数据例如存储在存储装置64中。在图11的例子中,相邻地表示有冷却温度的目标信息df1、表示由温度传感器96测量的温度的处理信息dd1。
165.在上述例子中,虽然对构成仅包括基板w2的组的情况进行了说明,但是对构成仅包括基板w1的组的情况也相同。即,依次处理装置30(例如清洗装置12)中测量的参数与基
板w1相关联,作为依次收集数据例如存储在存储装置64中。对基板w1的依次收集数据与图6相同。
166.同时处理装置40(例如脱水烘烤装置13)中测量的参数与一张基板w1相关联,同时作为收集数据例如存储在存储装置64中。图12是示意性表示对仅包括基板w1的组的同时收集数据的一例的图。在图12的例子中,基板有无信息de1表示仅存在上游侧的基板w1的“上游基板”。在图12的例子中,也相邻地表示有加热温度的目标信息df1、表示由温度传感器95测量的温度的处理信息dd1,相邻地表示有冷却温度的目标信息df1、表示由温度传感器96测量的温度的处理信息dd1。
167.此外,在上述例子中,作为基板w的欠缺,说明了装载盒10内的各槽中有空位的情况。但是,在基板处理装置1中的基板w的处理中发生异常的情况下,还存在将发生该异常的基板w从基板处理装置1排除的情况。该异常的种类不做特别地限制,作为该异常可以例示基板w的裂纹。基板处理装置1在发生异常时可以中断动作。然后,操作者手动将发生异常的基板w从基板处理装置1排除。此时,操作者将表示排除了哪个基板w的信息输入到输入部66。由此,控制部60能够获知排除了哪个基板w。
168.《6-2.流程图》
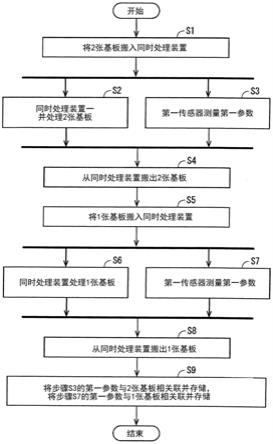
169.此处,在图9所示的装载盒10中,以同时处理装置40为主,对最上槽的基板w1、w2和第二个槽的基板w1的基板处理装置1的动作进行说明。首先,取出最上槽的两张基板w1、w2进行处理,接着取出第二个槽的一张基板w1进行处理。图13是表示同时处理装置40的动作的一例的流程图。此处,作为同时处理装置40,以脱水烘烤装置13的加热部82为例。
170.若对装载盒10的最上槽中容纳的基板w1、w2的清洗装置12的处理结束,则搬运机械手81从清洗装置12的基板导出部33取出两张基板w1、w2,一并搬入作为同时处理装置40的一例的加热部82(步骤s1)。
171.接着,加热部82一并加热处理两张基板w1、w2(步骤s2)。与该加热处理并行地,温度传感器95测量基板w1、w2的温度(步骤s3)。即,温度传感器95在加热部82对两张基板w1、w2的处理中测量基板w1、w2的温度。若加热处理结束,则搬运机械手81从加热部82一并取出两张基板w1、w2,将基板w1、w2搬运到冷却部83(步骤s4)。
172.接着,若对装载盒10的第二槽容纳的基板w1的清洗装置12的处理结束,则搬运机械手81从清洗装置12的基板导出部33取出一张基板w1,搬入到加热部82(步骤s5)。
173.接着,加热部82加热处理一张基板w1(步骤s6)。与该加热处理并行地,温度传感器95测量基板w1的温度(步骤s7)。即,温度传感器95在加热部82对一张基板w1的处理中测量基板w1的温度。若加热处理结束,则搬运机械手81从加热部82取出一张基板w1,将基板w1搬运到冷却部83(步骤s8)。
174.接着,控制部60将在步骤s3中测量的第一参数与在步骤s2中处理的两张基板w1、w2相关联并存储,将在步骤s7中测量的第一参数与在步骤s6中处理的一张基板w1相关联并存储(步骤s9)。此外,控制部60可以响应步骤s2的加热处理的结束,将在步骤s3中测量的第一参数与在步骤s2中处理的两张基板w1、w2相关联并存储。
175.《7.作用效果》
176.如上所述,在本实施方式中,同时处理装置40的第一传感器测量的参数与组相关联,由控制部60存储。
177.此外,在同时处理装置40中,如上所述,对各个基板w的处理时刻实质上是同一时刻。因此,属于同一组的基板w的参数的偏差小,几乎相同。若将这种参数与基板w单独相关联地存储,则收集数据的数据量变大,大量消耗存储装置64的存储容量。
178.对此,在本实施方式中,同时处理装置40的第一传感器测量的参数与组相关联,由控制部60存储。由此,能够用更小的数据量收集参数。
179.而且,在构成组的基板w的张数变动的情况下,根据该基板w的张数的变动收集由同时处理装置40的第一传感器测量的参数。具体来说,在两张基板w一并搬入到同时处理装置40的情况下,控制部60将由第一传感器测量的参数与两张基板w相关联并存储(参照图7),在一张基板w一并搬入到同时处理装置40的情况下,控制部60将由第一传感器测量的参数与一张基板w相关联并存储(参照图11和图12)。
180.更普遍地,在n张基板w一并搬入到同时处理装置40的情况下,控制部60将在对n张基板w的同时处理装置40的处理中由第一传感器测量的参数,与该n张基板w的组相关联并存储,在m(m是1以上且小于n的整数)张基板w一并搬入到同时处理装置40的情况下,控制部60将在对m张基板w的同时处理装置40的处理中由第一传感器测量的参数,与该m张基板w的组相关联并存储。
181.据此,即使构成组的基板w的张数变动,也可以根据该变动后的基板w的张数收集参数。由此,能够根据基板w的张数的变动,适当地收集参数。
182.此外,在上述例子中,由依次处理装置30的第二传感器测量的参数与基板w单独地相关联,而不是与组相关联,由控制部60存储。依次处理装置30中,对各个基板w的处理的时刻彼此不同,因此由依次处理装置30的第二传感器测量的参数即使例如是同一组,也根据每个基板w不同。特别地,在向基板w供给流体的清洗装置12等的依次处理装置30中,该流体的流量和压力随着时间容易变动,因此参数的偏差变得较大。
183.在上述例子中,由依次处理装置30的第二传感器测量的参数与基板w单独地相关联,而不是与组相关联,由控制部60存储。由此,可以在不丢失关于基板w之间的参数的偏差信息的情况下适当地收集参数。
184.《8.处理参数的通知》
185.操作者在想要确认收集数据(依次收集数据和同时收集数据)时,向输入部66输入收集数据的通知指示。控制部60响应该输入,例如向操作者通知存储装置64中存储的依次收集数据和同时收集数据。例如控制部60使显示部67显示依次收集数据和同时收集数据。由此,操作者能够确认对基板w的第一参数和第二参数,从而能够确认基板w的处理是否合适。
186.例如操作者通过将基板w1、w2都包括的组的同时收集数据(参照图7)和仅包括基板w1、w2中的一个的组的同时收集数据(参照图11和图12)进行比较,能够确认这些差异。例如,存在对仅包括基板w1、w2中的一个的组的温度传感器95的测量温度高于对基板w1、w2都包括的组的温度传感器95的测量温度的情况。这是因为,基板w的张数越少,加热部82中基板w的温度越容易上升。该情况下,可以将仅处理基板w1、w2中的一个时的加热温度的目标值更新为更小的值,使得测量温度更接近加热温度的目标值。这种更新例如可以通过操作者将仅处理基板w1、w2中的一个时的新的目标值输入到输入部66,来输入到控制部60。
187.此外,操作者通过将各个基板w的依次收集数据彼此进行比较,能够确认这些差
异。操作者在该差异大于允许值的情况下,能够将该差异例如用于清洗装置12的各个配管上的阀(未图示)是否需要调整的判断,用于配管上的过滤器(未图示)是否需要更换的判断,用于泵的驱动方式是否需要变更的判断。
188.《9.变形例》
189.在上述例子中,控制部60将处理中测量的参数适当地与基板w相关联并收集。成为该收集的对象的参数的测量时刻不做特别地限制。控制部60只要存储在处理中适当的时刻测量的参数即可。对各个基板w的处理开始到测量时刻的期间的长度,可以是多个基板w之间共同的长度,也可以稍微不同。此外,在基板w的处理中传感器重复测量参数的情况下,控制部60计算参数的时间统计值(例如平均值),将该统计值存储为基板w的参数。
190.此外,在设置有测量相同参数的多个传感器(例如多个温度传感器95)的情况下,控制部60可以存储由多个传感器测量的多个参数中的至少一个。或者,控制部60可以存储该多个参数的统计值(例如平均值)。
191.以上,对基板处理装置的实施方式进行了说明,但是该实施方式只要不脱离其宗旨就可以进行上述之外的各种变更。上述各种实施方式和变形例可以适当地组合来实施。
192.例如,基板w1、w2的大小可以彼此不同。此外,控制部60可以具有多层结构。例如,控制部60可以包括主控制部和多个末端控制部。末端控制部例如设置在分度器部11、清洗装置12、脱水烘烤装置13、涂覆关联装置14、预烘烤装置15、曝光装置16、显影装置17和后烘烤装置18的各处理装置。主控制部设置在基板处理装置1,与多个末端控制部进行通信。在设置多个基板处理装置1的情况下,可以设置集中地管理这些基板处理装置1的中央控制部。中央控制部与多个基板处理装置1的主控制部进行通信。各个装置中的传感器的测量信号传递至末端控制部被收集。该收集数据可以从末端控制部传递到更上位的主控制部和中央控制部。由此,在中央控制部中,可以管理多个基板处理装置1的收集数据。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
