1.本实用新型涉及物料贴附物处理领域,尤其是一种贴附物去除设备。
背景技术:
2.随着自动化产业的开发、兴起,越来越多的产品开始自动化生产和加工,而在生产加工过程中,需要将某些物料表面贴附的标签或保护膜等贴附物去除,再对该物料进行下一步加工,如果不能将标签或保护膜去除掉,则会导致物料在下一步加工时无法正常使用甚至报废,因此如何高效稳定地撕除物料上的标签或保护膜,提升撕除物料上的贴附物的品质及成功率,降低物料抛料率,节约生产成本,提高作业效率,已成为现代化工业生产中亟需解决的问题。
技术实现要素:
3.有鉴于此,本实用新型的目的是提供一种能够高效稳定地撕除物料上贴附的标签或保护膜等贴附物的贴附物去除设备,从而提升撕除贴附物的品质及成功率,降低物料抛料率,节约生产成本,提高作业效率。
4.本实用新型实施例提供了一种贴附物去除设备,所述设备包括:机架;驱动机构,安装在所述机架上;移动机构,与所述驱动机构联动;其中,所述移动机构包括:安装架,与所述驱动机构联动;夹爪组件,用于夹紧待撕贴附物;转动组件,安装在所述安装架上,用于驱动所述夹爪组件旋转并定位。
5.进一步地,所述驱动机构包括:电机,固定安装在所述机架上;主动带轮,转动安装在所述机架上,且与所述电机联动;从动带轮,转动安装在所述机架上;传送带,套设在所述主动带轮和所述从动带轮上,所述安装架与所述传送带固定连接;所述机架上设置有滑轨,所述滑轨的延伸方向平行于所述主动带轮与所述从动带轮轴心的连线,所述移动机构滑动安装在所述滑轨上。
6.进一步地,所述夹爪组件包括:安装板,设置在所述安装架一侧并由所述转动组件驱动旋转并定位;夹爪驱动机构,固定安装在所述安装板上;夹爪,与所述夹爪驱动机构联动,用于夹紧待撕贴附物。
7.进一步地,所述转动组件包括:驱动气缸,转动安装在所述安装架上;连接臂,第一端与所述驱动气缸的驱动端转动连接;转轴,转动安装在所述安装架上,所述转轴一端与所述连接臂的第二端固定连接,另一端与所述安装板固定连接,所述安装板通过所述转轴转动连接在所述安装架上。
8.进一步地,所述安装架上设置有轴承孔和轴承,所述轴承孔为贯穿所述安装架的通孔,所述轴承固定安装在所述轴承孔中,所述转轴安装在所述轴承上,且所述转轴两端分别从所述轴承孔中伸出。
9.进一步地,所述夹爪包括:第一移动件,所述第一移动件具有第一夹紧面;第二移动件,所述第二移动件具有第二夹紧面,所述第二夹紧面与所述第一夹紧面相对设置;所述
第一移动件和所述第二移动件用于在所述夹爪驱动机构的带动下相向运动,使所述第二夹紧面与所述第一夹紧面贴合以夹紧待撕贴附物。
10.进一步地,所述夹爪上设置有传感器,所述第一夹紧面上设置有安装孔,所述传感器安装在所述安装孔中,所述第一移动件上还开设有缺口槽,所述缺口槽与所述安装孔连通,用于容置所述传感器的连接线缆。
11.进一步地,所述第二夹紧面上设置有通孔,所述通孔与所述安装孔的位置相对设置。
12.进一步地,所述第一夹紧面和/或所述第二夹紧面表面呈锯齿状。
13.进一步地,所述夹爪驱动机构包括:驱动气缸,固定安装在所述安装板上;导向槽,设置于所述驱动气缸侧壁上;以及两个夹指,活动安装在所述导向槽中,所述第一移动件和所述第二移动件分别与两个所述夹指固定连接,两个所述夹指用于在所述驱动气缸的驱动下沿所述导向槽带动所述第一移动件和所述第二移动件相互靠近或远离。
14.本实用新型实施例的贴附物去除设备,通过在机架上设置驱动机构和带有安装架、转动组件和夹爪组件的移动机构,并用驱动机构驱动安装架运动,使夹爪组件和转动组件在夹住贴附物后能够跟随安装架运动,从而撕掉物料上的贴附物。实现了对物料上贴附的贴附物的高效稳定的撕除,提升了撕标品质及成功率,降低了物料抛料率,节约了生产成本,提高了作业效率。
附图说明
15.通过以下参照附图对本实用新型实施例的描述,本实用新型的上述以及其它目的、特征和优点将更为清楚,在附图中:
16.图1为本实用新型实施例的贴附物去除设备的整体结构示意图;
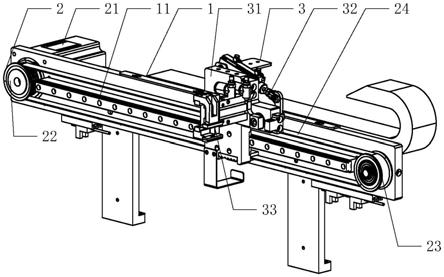
17.图2为本实用新型实施例的移动机构的整体结构示意图;
18.图3为本实用新型实施例的安装架和转动组件的结构示意图;
19.图4为本实用新型实施例的夹爪组件的结构示意图;
20.图5为本实用新型实施例的夹爪的具体结构示意图;
21.图6为本实用新型实施例的第一移动件和传感器的结构示意图。
22.图例:1.机架;11.滑轨;2.驱动机构;21.电机;22.主动带轮;23.从动带轮;24.传送带;3.移动机构;31.安装架;311.轴承孔;312.轴承;32.转动组件;321.驱动气缸;322.连接臂;323.转轴;33.夹爪组件;331.安装板;332.夹爪驱动机构;3321.驱动气缸;3322.导向槽;3323.夹指;333.夹爪;3331.第一移动件;33311.第一夹紧面;33312.安装孔;33313.缺口槽;3332.第二移动件;33321.第二夹紧面;33322.通孔;3333.传感器。
具体实施方式
23.以下基于实施例对本实用新型进行描述,但是本实用新型并不仅仅限于这些实施例。在下文对本实用新型的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本实用新型。为了避免混淆本实用新型的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
24.此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且
附图不一定是按比例绘制的。
25.除非上下文明确要求,否则在说明书的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。
26.在本实用新型的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
27.如图1所示,本实用新型实施例的贴附物去除设备包括机架1、驱动机构2和移动机构3。其中,驱动机构2安装在机架1上。移动机构3与驱动机构2联动,且移动机构3包括安装架31、转动组件32和夹爪组件33。其中,安装架31与驱动机构2联动,夹爪组件33用于夹紧待撕贴附物,转动组件32安装在安装架31上,用于驱动夹爪组件33旋转并定位。本设备用于对物料上贴附的标签或保护膜等贴附物进行去除,初始状态时,标签或保护膜贴附在物料上表面时,且有一部分延伸至物料边沿以外处于悬空状态。工作时,当待撕标签或保护膜等贴附物的悬空部分进入夹爪组件33的夹持区域后,夹爪组件33开始动作,夹紧待撕贴附物,然后,转动组件32驱动夹爪组件33的夹持位置转动至物料上表面上侧,从而将待撕贴附物从物料上表面掀起一定程度,最后驱动机构2再驱动移动机构3沿贴附物贴附方向运动,将贴附物从物料上剥离。本实施例的贴附物去除设备,实现了对物料上贴附的标签或保护膜等贴附物的高效稳定的撕除,提升了撕除贴附物的品质及成功率,降低了物料抛料率,节约了生产成本,提高了作业效率。
28.在一种具体的实施方式中,驱动机构2包括电机21、主动带轮22、从动带轮23和传送带24。其中,电机21固定安装在机架1上,主动带轮22和从动带轮23转动安装在机架1上,且主动带轮与电机21联动。传送带24套设在主动带轮22和从动带轮23上,安装架31与传送带24固定连接。当夹爪组件33将贴附物夹住,且在转动组件32的驱动下将贴附物掀起后,驱动机构2的电机21启动,电机21带动主动带轮22进行转动,从而带动套设在主动带轮22和从动带轮23上的传送带24运动,而由于安装架31与传送带24固定连接,所以安装架31也随传送带24进行移动,最终使夹爪组件33将贴附物从物料上撕下。当贴附物被撕下后,电机21反向启动,使传送带24带动移动机构3归位,为下一次撕除贴附物做准备。在某些实施例中,带传动也可以改设置为链传动,与本实施例具有相同的技术效果。在一些实施例中,机架1上设置有滑轨11。滑轨11的延伸方向平行于主动带轮22与从动带轮23轴心的连线,移动机构3滑动安装在滑轨11上。由于传送带24具有一定的弹性,因此若移动机构3只固定在传送带24上会造成其移动过程中不够稳定的问题,而且传送带24受到过大的应力还会降低传送带24的使用寿命。因此,本实施例通过在机架1上设置滑轨11,并将移动机构3滑动安装在滑轨11上,使滑轨11既能够承担移动机构3的重力,又可以为移动机构3的移动起到导向作用,而传送带24只承担驱动作用,从而提高了移动机构3运动的稳定性,并且减轻了传送带24承担的压力,提高了传送带24的使用寿命。
29.如图2所示,在一种具体的实施方式中,夹爪组件33包括安装板331、夹爪驱动机构332和夹爪333。其中,安装板331设置在安装架31一侧并由转动组件32驱动旋转并定位,夹爪驱动机构332固定安装在安装板331上,夹爪333与夹爪驱动机构332联动,用于夹紧待撕贴附物。夹爪驱动机构332可以为气缸或其他驱动机构,当对贴附物进行夹紧时,夹爪驱动机构332动作,带动夹爪333进行夹紧动作,将贴附物夹住,然后转动组件32动作,带动安装
板331进行转动,使夹爪驱动组件332和夹爪333随之转动,从而将贴附物掀起。本实施例通过设置夹爪驱动机构332和夹爪333,实现了将贴附物夹紧的动作,并通过安装板331与转动组件32的配合,实现了将贴附物掀起的动作,使设备能够顺利完成撕除贴附物的工作。
30.如图3所示,在一种具体的实施方式中,转动组件32包括驱动气缸321、连接臂322和转轴323。其中,驱动气缸321转动安装在安装架31上,连接臂322的第一端与驱动气缸321的驱动端转动连接,转轴323转动安装在安装架31上。转轴323一端与连接臂322的第二端固定连接,另一端与安装板331固定连接,安装板331通过转轴323转动连接在安装架31上。当夹爪组件33将贴附物夹紧后,驱动气缸321伸出,推动连接臂322绕转轴323的轴线进行转动,由于转轴323一端与连接臂322的第二端固定连接,所以转轴323也随连接臂322的转动进行转动,而又由于转轴323的另一端与安装板331固定连接,因此随着转轴323的转动,安装板331也随之转动,从而带动夹爪驱动机构332和夹爪333转动,实现将贴附物掀起,以便进行下一步对贴附物地撕除。待撕除完成后,气缸321缩回,带动连接臂322、转轴323和夹爪组件33归位,以便进行下一次撕除贴附物的动作。本实施例通过使用驱动气缸321、连接臂322和转轴323,巧妙地实现了带动夹爪组件33进行转动的目标动作,使得贴附物去除设备能够更好的进行工作。
31.在一种具体的实施方式中,安装架31上设置有轴承孔311和轴承312,轴承孔311为贯穿安装架31的通孔,轴承312固定安装在轴承孔311中,转轴323安装在轴承312上,且转轴323两端分别从轴承孔311中伸出。本实施例通过设置轴承312,使转轴323能够更加容易的相对于安装架31转动,提高了设备的使用寿命和使用效率。
32.如图4和图5所示,在一种具体的实施方式中,夹爪333包括第一移动件3331和第二移动件3332。其中,第一移动件3331具有第一夹紧面33311,第二移动件3332具有第二夹紧面33321,且第二夹紧面33321与第一夹紧面33311相对设置。第一移动件3331和第二移动件3332用于在夹爪驱动机构332的带动下相向运动,使第二夹紧面33321与第一夹紧面33311贴合以夹紧待撕贴附物。当夹爪组件33对贴附物进行夹紧动作时,夹爪驱动机构332驱动第一移动件3331和第二移动件3332相向运动,直至第一夹紧面33311和第二夹紧面33321将贴附物夹紧在其中,以此实现对贴附物的固定,方便进行后续撕除贴附物的动作。
33.如图6所示,在一些可选的实施方式中,夹爪333还设置有传感器3333。第一夹紧面33311上设置有安装孔33312,传感器3333安装在安装孔33312中,用于检测第一夹紧面33311和第二夹紧面33321之间是否有贴附物存在。第一移动件3331上还开设有缺口槽33313,缺口槽33313与安装孔33312连通,传感器3333安装在安装孔33312中时,传感器3333上连接的线缆位于缺口槽33313中,并从缺口槽33313伸出。具体的,传感器3333可以选用光纤传感器,感应端朝向第二夹紧面33321设置,若在第一夹紧面33311和第二夹紧面33321之间有贴附物存在时,则传感器3333外界环境的光线被遮挡,传感器3333通过感应外界环境中光线的变化,即可感应到贴附物已准备就绪,从而向计算机控制系统发出信号,使贴附物去除设备开始撕除贴附物的动作。若第一夹紧面33311和第二夹紧面33321之间没有贴附物,则光线不会被遮挡,此时设备处于待机状态,不会启动。本实施例通过设置传感器3333,实现了贴附物去除设备的自动化运行,同时避免了设备在没有贴附物存在时空运行,造成资源浪费的问题。
34.如图5所示,在一些可选的实施方式中,第二夹紧面33321上设置有通孔33322,通
孔33322与安装孔33312的位置相对设置。当传感器3333为光纤传感器时,若第二夹紧面33321距离第一传感面33311过近,可能会遮挡光线,导致传感器3333误感应,使设备误启动,从而造成资源浪费且影响设备正常使用。因此本实施例在第二夹紧面33321上对应于安装孔33312位置设置有通孔33322,外界环境光线可以从通孔33322中射入传感器3333的感应端,只有贴附物进入第一夹紧面33311和第二夹紧面33321之间挡住从通孔33322中射入的光线时,传感器3333才能感应到光线的变化,并发出启动信号,从而避免了第二夹紧面33321挡住光线造成传感器3333误感应,使设备误启动的问题。
35.如图4-图6所示,在一些可选的实施方式中,第一夹紧面33311和/或第二夹紧面33321表面呈锯齿状,能够增大第一夹紧面33311和/或第二夹紧面33321的摩擦力,使夹爪333能够更加牢固的夹住贴附物,避免在撕除贴附物的过程中,贴附物从夹爪333中脱出,影响对贴附物的去除效果。
36.如图4所示,在一种具体的实施方式中,夹爪驱动机构332包括驱动气缸3321、导向槽3322和两个夹指3323。其中,驱动气缸3321固定安装在安装板331上,导向槽3322设置于驱动气缸3321侧壁上。两个夹指3323活动安装在导向槽3322中,第一移动件3331和第二移动件3332分别与两个夹指3323固定连接,两个夹指3323用于在驱动气缸3321的驱动下沿导向槽3322带动第一移动件3331和第二移动件3332相互靠近或远离。在对贴附物进行夹持时,驱动气缸3321驱动两个夹指3323沿导向槽3322相向运动,第一移动件3331和第二移动件3332也随之相向运动,直至将贴附物夹紧在第一夹紧面33311和第二夹紧面33321之间。在此过程种,导向槽3322能够对夹指3323的运动起导向作用,使夹爪333的夹持动作更加稳定,夹住贴附物的效果更好。
37.综上所述,本实施例的贴附物去除设备,通过在机架1上设置驱动机构2和带有安装架31、转动组件32和夹爪组件33的移动机构3,并用驱动机构2驱动安装架31运动,使夹爪组件33和转动组件32在夹住贴附物后能够跟随安装架31运动,从而撕掉物料上的贴附物。实现了对物料上贴附的标签或保护膜等贴附物的高效稳定地撕除,提升了撕除贴附物的品质及成功率,降低了物料抛料率,节约了生产成本,提高了作业效率。
38.以上所述仅为本实用新型的优选实施例,并不用于限制本实用新型,对于本领域技术人员而言,本实用新型可以有各种改动和变化。凡在本实用新型的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。