1.本实用新型属于自动化领域,尤其涉及一种不同角度的机械抓取装置。
背景技术:
2.智能化制造在如今的生产过程中占有很高的比重,自动化生产极大的提高了生产效率和生产质量水平,自动化生产需要深入到生产的每一个环节中去。
3.在生产加工中,由于工件在不同工位上需要加工的位置不同,且不同工位上对工件的固定方式也各不相同,需要通过机械抓取装置抓取工件实现在不同工位上的转移,所以需要一种机械抓取装置能够从不同的角度对工件进行抓取定位。
技术实现要素:
4.本实用新型为了解决上述技术问题,提供一种不同角度的机械抓取装置,本实用新型采用的技术方案如下:
5.一种不同角度的机械抓取装置,包括底板、夹持机构、推缸定位机构和方位识别机构;所述夹持机构包括第一夹持机构和第二夹持机构,所述第一夹持机构平行固定在所述底板的一端,所述第二夹持机构垂直固定在所述底板的另一端;所述推缸定位机构设置在所述第一夹持机构上;所述方位识别机构设置在所述底板上。
6.采用上述技术特征具有如下技术效果:
7.本实用新型的不同角度的机械抓取装置,通过方位识别机构识别工件的角度和位置,选择不同方位的夹持机构对工件进行夹持,横向夹持或竖向夹持,实现自动抓取的效果。待上个工件安装时,通过方位识别机构识别不同方位的工件,进行定位抓取,从而便于工件在下一个工位上进行不同方式的固定,而不至于因为本夹持装置的夹持方式,妨碍在下一工位上的固定。同时,推缸定位机构起到辅助夹持的功能,提高夹持的稳定性,提高工作效率。
8.本技术方案还可以做如下改进:
9.进一步地,所述夹持机构包括驱动气缸、位置传感器,所述驱动气缸上设有两个相对运动的滑块,在所述滑块上固定有夹指,所述位置传感器设置于所述滑块或夹指上,用于检测是否抓取工件。
10.采用上述进一步技术特征具有如下技术效果:
11.夹持机构的驱动气缸驱动滑块相对运动,从而驱动夹指做收缩夹紧或者扩张松开的动作,对工件进行夹起或松开;位置传感器用于检测当前夹持机构与工件的位置关系,判断是否抓取工件,也用于检测当前位置上是否有障碍物,防止夹持机构发生磕碰。
12.进一步地,所述推缸定位机构包括推动气缸和推板,所述推板固定在所述推动气缸的输出轴上,所述推动气缸固定在所述驱动气缸上,所述推板位于夹持机构的两夹指中部。
13.采用上述进一步技术特征具有如下技术效果:
14.推板在推动气缸的作用下做往复运动,用于推动工件定位,起到辅助定位的功能,提高夹持机构夹持的准确性。
15.进一步地,所述夹指内侧设置有夹块;
16.进一步地,述夹块采用优力胶制作而成。
17.采用上述进一步技术特征具有如下技术效果:
18.夹块的设置增加对工件的压强,增大夹持力,夹块采用优力胶制作而成,有利于增大摩擦力,柔性的夹块也有利于保护被夹持工件不会被划伤。
19.进一步地,所述夹块的夹持面做成与工件的被夹持面相适配的曲面。
20.采用上述进一步技术特征具有如下技术效果:
21.夹块的夹持面做成与工件的被夹持面相适配的曲面,可以增大夹块对工件的接触面积,提高夹持力,夹持更稳固。
22.进一步地,所述位置传感器为光电传感器。
23.采用上述进一步技术特征具有如下技术效果:
24.进一步地,与所述底板相垂直的第二夹持机构的夹指上设置有防脱钩部件,所述防脱钩部件固定在所述夹指的端部,所述防脱钩部件相对方向的边缘探出所述夹指的端部。
25.采用上述进一步技术特征具有如下技术效果:
26.在工件表面有凸棱等结构时,防脱钩部件的设置可以使防脱钩部件卡住工件凸棱处,防止工件在竖向夹持时脱落。
27.进一步地,所述方位识别机构包括摄像头和摄像头光源,所述摄像头光源设置在摄像头的前面。
28.采用上述进一步技术特征具有如下技术效果:
29.摄像头可以用于观察工件不同的方位,进行拍照完捕捉工件的位置和角度,来判断采用平行或垂直的夹持机构对工件进行夹持,实现装置的自动抓取。摄像头光源的设置有利于摄像头拍照的清晰度与准确性。
30.本实用新型所要解决的技术问题克服上述现有技术的不足,提供一种不同角度的机械抓取装置,通过方位识别机构识别工件的角度和位置,选择不同方位的夹持机构对工件进行夹持,横向夹持或竖向夹持,实现自动抓取的效果。从而便于工件在下一个工位上进行不同方式的固定,而不至于因为本夹持装置的夹持方式,妨碍在下一工位上的固定。同时,推缸定位机构起到辅助夹持的功能,提高夹持的稳定性,提高工作效率。
附图说明
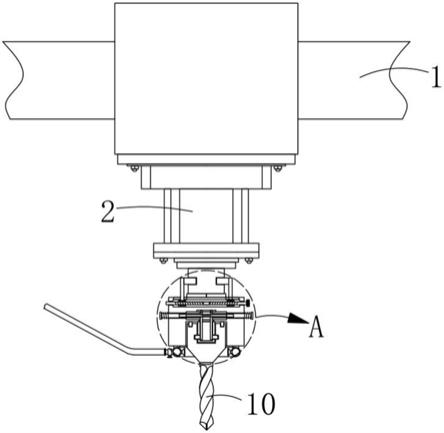
31.图1为本实用新型的不同角度的机械抓取装置的结构示意图;
32.图2为本实用新型的平行底板的第一夹持机构的结构示意图;
33.图3为本实用新型的垂直底板的第二夹持机构的结构示意图;
34.图4为本实用新型的平行底板的第一夹持机构夹取工件的示意图;
35.图5为本实用新型的垂直底板的第二夹持机构夹取工件的示意图。
36.图中标记说明:
37.1底板;
38.2夹持机构;2-1驱动气缸;2-2光电传感器;2-3滑块;2-4夹指;2-5 夹块;2-6防脱钩部件;
39.3推缸定位机构;3-1推动气缸;3-2推动支架;3-3推板;
40.4方位识别机构;4-1摄像头支架;4-2摄像头;4-3光源支架;4-4摄像头光源;
41.5固定板;6工件。
具体实施方式
42.为了更好地了解本实用新型的目的、结构及功能,下面结合附图,对本实用新型一种不同角度的机械抓取装置做进一步详细的描述。
43.如图1-5所示,一种不同角度的机械抓取装置,包括底板1、夹持机构 2、推缸定位机构3和方位识别机构4;夹持机构2包括第一夹持机构和第二夹持机构,在底板1的一端水平固定第一夹持机构,在底板1的另一端垂直固定第二夹持机构,夹持机构2用于夹持工件6;推缸定位机构3设置在第一夹持机构2上,起辅助定位的功能;方位识别机构4设置在底板1的一端设,识别工件6方位。
44.其中,方位识别机构4设置在工件6来料位置,包括摄像头4-2和摄像头光源4-4,摄像头4-2通过摄像头支架4-1固定在固定板5上,摄像头光源 4-4通过光源支架4-3设置在摄像头4-2的前面。摄像头4-2可以用于观察工件6不同的方位,进行拍照完捕捉工件6的位置和角度,来判断采用平行或垂直的夹持机构2对工件6进行夹持,实现装置的自动抓取。摄像头光源4-4 的设置有利于摄像头4-2拍照的清晰度与准确性。
45.夹持机构2包括驱动气缸2-1、位置传感器,驱动气缸2-1上设有两个相对运动的滑块2-3,在滑块2-3上固定夹指2-4,夹持机构2的驱动气缸2-1 驱动滑块2-3相对运动,从而驱动夹指2-4做收缩夹紧或者扩张松开的动作,对工件6进行夹起或松开;第一夹持机构通过固定板5固定在底板1的一端,第二夹持机构的驱动气缸2-1直接固定在底板1的另一端。夹持机构2上的位置传感器为光电传感器2-2,设置于夹持机构2的滑块或者夹指上,用于检测当前夹持机构2与工件6的位置关系,判断是否抓取到工件6,也用于检测当前位置上是否有障碍物,防止夹持机构2发生磕碰。夹指2-4内侧设置夹块2-5,夹块2-5采用优力胶制作而成,夹块2-5的夹持面做成与工件6 的被夹持面相适配的曲面。夹块2-5的设置增加对工件6的压强,增大夹持力,同时,夹块2-5采用优力胶制作而成,有利于增大摩擦力,柔性的夹块 2-5也有利于保护被夹持工件6不会被划伤,夹块2-5的夹持面做成与工件6 的被夹持面相适配的曲面,可以增大夹块2-5对工件6的接触面积,提高夹持力,夹持更稳固。第二夹持机构的夹指2-4上设置防脱钩部件2-6,用于卡住工件6凸棱处防止工件6在竖向夹持时脱落。
46.推缸定位机构3包括推动气缸3-1和推板3-3,推动气缸3-1通过推动支架3-2固定在驱动气缸2-1上,推板3-3位于夹持机构2的两夹指2-4中部。推板3-3在推动气缸3-1的作用下做往复运动,用于推动工件6定位,起到辅助夹持的功能,当第一夹持机构来工件6时,因为工件6自身的重量较大,单凭第二夹持机构的夹爪进行夹持时,工件6受重力影响,容易绕夹持点旋转,导致夹持不稳,此时启动推缸定位机构3,推动气缸3-1向前推动推板 3-3,推板3-3挤压工件6,从而限制工件6的位置,避免其绕夹持点旋转,提高夹持机构2夹持的稳定性。
47.使用时,摄像头4-2可以用于观察来料工件6的方位,进行拍照捕捉工件6的位置和
角度,来判断采用平行或垂直的夹持机构2对工件6进行夹持;相应的夹持机构2上的光电传感器2-2检测当前夹持机构2与工件6的位置关系,检测当前位置上是否有障碍物,判断是否抓取工件6,并防止夹持机构2发生磕碰。待光电传感器2-2检测到可以抓取时,夹持机构2的驱动气缸2-1驱动滑块2-3向内相对运动,从而驱动夹指2-4做收缩夹紧将工件6 夹住,待工件6送达要送达的位置后,夹持机构2的驱动气缸2-1驱动滑块 2-3向外相对运动,从而驱动夹指2-4做扩张松开的动作,将工件6松开。待上一个工件6安装时,可以通过摄像头4-2拍照捕捉不同方位的工件6,判断其位置,进行下一个不同方位工件6的抓取,进行下一方位工件6的安装。如图该装置夹取工件6的示意图所示。
48.本实用新型所要解决的技术问题克服上述现有技术的不足,提供一种不同角度的机械抓取装置,通过方位识别机构4识别工件6的角度和位置,选择不同方位的夹持机构2对工件6进行夹持,横向夹持或竖向夹持,实现自动抓取的效果;待上个工件6安装时,通过方位识别机构4识别不同方位的工件6,进行定位抓取,从而便于工件6在下一个工位上进行不同方式的固定,而不至于因为本夹持装置的夹持方式,妨碍在下一工位上的固定;同时,推缸定位机构3起到辅助定位夹持的功能,提高夹持的稳定性,提高工作效率。
49.可以理解,本实用新型是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本实用新型的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本实用新型的精神和范围。因此,本实用新型不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本实用新型所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。