1.本实用新型属于施工机器人技术领域,具体涉及一种纯电动施工机器人。
背景技术:
2.现在智能机器人在工作和生活中随处可见,其中施工机器人已经开始在建筑工程小范围代替人类做一些简单、枯燥、危险并且需要大量体力的工作。
3.但现有的施工机器人大多采用发动机作为能源,在使用时有一定的弊端,一方面是能耗大,不环保,另一方面是施工机器人的整车重量大,制造成本高,另外无法充分发挥制动装置的性能,无法实现对制动能量进行回收利用,浪费了一部分的资源能耗,而且一般将配重块的位置是固定的,不能根据重物自身重量的大小进行合理的位置移动,影响了施工机器人的使用范围。
技术实现要素:
4.为解决上述背景技术中提出的问题。本实用新型提供了一种纯电动施工机器人,其解决了传统采用发电机作为能源、无法对制动能量进行回收利用以及配重块位置无法调节的技术问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种纯电动施工机器人,包括第一壳体,所述第一壳体内壁的顶部固定连接第二电机,所述第二电机的输出轴上固定连接有第四转轴,所述第四转轴的表面转动连接有第四轴承,所述第四轴承固定连接在第一壳体内壁的底部,所述第四转轴的表面固定连接有两个主动轮,所述主动轮通过传送带传动连接有从动轮,所述从动轮内固定连接有第三转轴,所述第三转轴的表面转动连接有第三轴承,所述第三轴承固定连接在第一壳体内壁的顶部和底部,所述第三转轴的两端分别穿过第一壳体并固定连接有行走轮,每两个所述行走轮通过传动履带传动连接,所述第一壳体内固定连接有制动能量回收组件,所述第一壳体的后侧固定连接有第二壳体,所述第二壳体内固定连接有可移动配重块组件。
6.作为本实用新型的进一步方案:所述制动能量回收组件包括发电机,所述发电机固定连接在第一壳体内壁的底部,所述发电机的输出轴上固定连接有第二转轴,所述第二转轴的表面转动连接有第二轴承,所述第二轴承固定连接在第一壳体内壁的顶部,所述第二转轴的表面固定连接有联轴器、电磁离合器和第二齿轮,所述第二齿轮啮合有第一齿轮,所述第一齿轮固定连接在第四转轴的表面。
7.作为本实用新型的进一步方案:所述可移动配重块组件包括第一电机,所述第一电机固定连接在第二壳体内壁的一侧,所述第一电机的输出轴上固定连接有螺纹柱,所述螺纹柱的一端固定连接有第一转轴,所述第一转轴的表面转动连接有第一轴承,所述第一轴承固定连接在第二壳体内壁的另一侧,所述螺纹柱的表面螺纹连接有螺纹帽,所述第二壳体内固定连接有滑杆,所述滑杆的表面滑动连接有滑套,所述螺纹帽和滑套的表面固定连接有配重块本体。
8.作为本实用新型的进一步方案:所述第一壳体内壁的顶部固定连接有锂电池座,所述锂电池座内设置有锂电池本体。
9.作为本实用新型的进一步方案:所述配重块本体的底部四角均设置有滑轮。
10.作为本实用新型的进一步方案:所述第一电机和第二电机与外部控制器信号连接。
11.作为本实用新型的进一步方案:所述发电机和第二电机与锂电池本体通过导线电性连接。
12.与现有技术相比,本实用新型的有益效果是:
13.1、该纯电动施工机器人,通过采用锂电池本体供电,控制第二电机工作,带动第四转轴转动,带动主动轮转动,在传送带的传动作用下,能够带动第三转轴转动,带动行走轮在传动履带的传动下进行移动,采用锂电池本体纯电动驱动该施工机器人,使得该施工机器人的重量小,能耗少,绿色环保,不采用传统的发动机作为能源,避免能耗不仅大,不环保,而且整车重量大,制造成本高的问题。
14.2、该纯电动施工机器人,通过设置发电机、联轴器、电磁离合器,第一齿轮啮合第二齿轮转动,能够带动第三转轴转动,制动开始时,能够将锂电池本体接通,电磁离合器两侧吸合,将动能传递给发电机进行能量回收,并对其进行利用,提高该施工机器人的制动能量回收利用效率,通过控制第一电机工作,带动螺纹柱转动,能够带动螺纹帽左右移动,在滑套在滑杆表面滑动的配合下,能够带动配重块本体左右移动,根据施工需要调节配重块本体的位置,通过设置滑轮,滑轮滚动能够配合配重块本体左右移动更加稳定。
附图说明
15.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
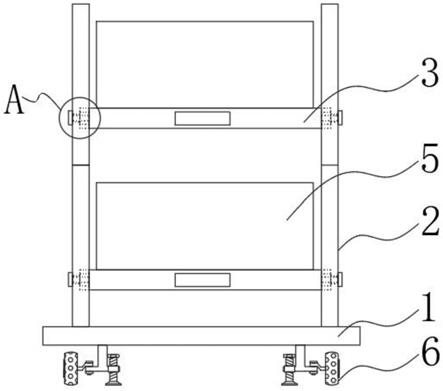
16.图1为本实用新型正视剖面的结构示意图;
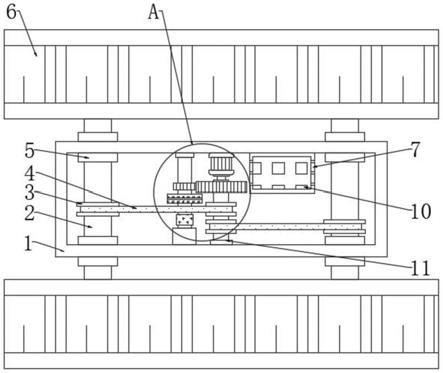
17.图2为本实用新型后视剖面的结构示意图;
18.图3为图1中的a部放大结构示意图;
19.图4为本实用新型图2中配重块本体立体的结构示意图;
20.图5为本实用新型图2前视的结构示意图;
21.图中:1、第一壳体;2、第三转轴;3、从动轮;4、传送带;5、第三轴承;6、传动履带;7、锂电池座;8、可移动配重块组件;81、第一电机;82、螺纹柱;83、螺纹帽;84、滑套;85、滑杆;86、配重块本体;87、第一轴承;88、第一转轴;89、滑轮;9、制动能量回收组件;91、发电机;92、联轴器;93、电磁离合器;94、第二齿轮;95、第一齿轮;96、第二转轴;97、第二轴承;10、锂电池本体;11、第四轴承;12、第二电机;13、第四转轴;14、主动轮;15、第二壳体;16、行走轮。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.实施例
24.请参阅图1-5,本实用新型提供以下技术方案:一种纯电动施工机器人,包括第一壳体1,第一壳体1内壁的顶部固定连接第二电机12,通过采用锂电池本体10供电,控制第二电机12工作,带动第四转轴13转动,带动主动轮14转动,在传送带4的传动作用下,能够带动第三转轴2转动,带动行走轮16在传动履带6的传动下进行移动,采用锂电池本体10纯电动驱动该施工机器人,使得该施工机器人的重量小,能耗少,绿色环保,不采用传统的发动机作为能源,避免能耗不仅大,不环保,而且整车重量大,制造成本高的问题,第二电机12的输出轴上固定连接有第四转轴13,第四转轴13的表面转动连接有第四轴承11。
25.第四轴承11固定连接在第一壳体1内壁的底部,第四转轴13的表面固定连接有两个主动轮14,主动轮14通过传送带4传动连接有从动轮3,从动轮3内固定连接有第三转轴2,第三转轴2的表面转动连接有第三轴承5,第三轴承5固定连接在第一壳体1内壁的顶部和底部,第三转轴2的两端分别穿过第一壳体1并固定连接有行走轮16,每两个行走轮16通过传动履带6传动连接,第一壳体1内固定连接有制动能量回收组件9,第一壳体1的后侧固定连接有第二壳体15,第二壳体15内固定连接有可移动配重块组件8。
26.制动能量回收组件9包括发电机91,通过设置发电机91、联轴器92、电磁离合器93,第一齿轮95啮合第二齿轮94转动,能够带动第三转轴2转动,制动开始时,能够将锂电池本体10接通,电磁离合器93两侧吸合,将动能传递给发电机91进行能量回收,并对其进行利用,提高该施工机器人的制动能量回收利用效率,发电机91固定连接在第一壳体1内壁的底部,发电机91的输出轴上固定连接有第二转轴96,第二转轴96的表面转动连接有第二轴承97,第二轴承97固定连接在第一壳体1内壁的顶部。
27.第二转轴96的表面固定连接有联轴器92、电磁离合器93和第二齿轮94,第二齿轮94啮合有第一齿轮95,第一齿轮95固定连接在第四转轴13的表面,可移动配重块组件8包括第一电机81,通过控制第一电机81工作,带动螺纹柱82转动,能够带动螺纹帽83左右移动,在滑套84在滑杆85表面滑动的配合下,能够带动配重块本体86左右移动,根据施工需要调节配重块本体86的位置,第一电机81固定连接在第二壳体15内壁的一侧,第一电机81的输出轴上固定连接有螺纹柱82,螺纹柱82的一端固定连接有第一转轴88,第一转轴88的表面转动连接有第一轴承87,第一轴承87固定连接在第二壳体15内壁的另一侧。
28.螺纹柱82的表面螺纹连接有螺纹帽83,第二壳体15内固定连接有滑杆85,滑杆85的表面滑动连接有滑套84,螺纹帽83和滑套84的表面固定连接有配重块本体86,第一壳体1内壁的前侧固定连接有锂电池座7,锂电池座7内设置有锂电池本体10,配重块本体86的底部四角均设置有滑轮89,通过设置滑轮89,滑轮89滚动能够配合配重块本体86左右移动更加稳定,第一电机81和第二电机12与外部控制器信号连接,发电机91和第二电机12与锂电池本体10通过导线电性连接。
29.本实用新型的工作原理为:
30.s1、当需要移动该施工机器人时,通过外部控制器,控制第二电机12开始工作,锂电池本体10接通为第二电机12供电,带动第四转轴13转动,带动主动轮14转动,在传送带4的传动作用下,带动第三转轴2转动,带动行走轮16在传动履带6的传动下带动该施工机器人开始移动,同时第一齿轮95啮合第二齿轮94转动,带动第三转轴2转动;
31.s2、在需要停止时,控制该施工机器人停止,当该施工机器人进行制动时,此时锂
电池本体10接通,电磁离合器93两侧吸合,产生的动能传递给发电机91进行能量回收,能量随即储存至锂电池本体10内,当需要移动可移动配重块本体86的位置时,通过外部控制器,控制第一电机81开始工作,带动螺纹柱82转动,带动螺纹帽83向右移动,在滑套84在滑杆85表面向右移动的配合下,在滑轮89的滑动配合下,带动配重块本体86向右移动至合适位置即可。
32.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行改动、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。