1.本实用新型涉及焊接技术领域,尤其涉及一种可全方位调整角度的机械焊接臂。
背景技术:
2.焊接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,现阶段的焊接方式有很多种,人工焊接、机械焊接或人机配合焊接等,并且随着科技的不断进步,机械焊接臂便应运而生,并且这种焊接方式能够进行批量不间断的焊接工作,焊接效率较高,此外,如机械手臂一样,其具有全方位的角度调整功能,从而能够适应从不同方位进行焊接工作。
3.现有技术中提出一种可全方位调整角度的机械焊接臂,包括固定座、第一万向轴、第二万向轴和基板,所述固定座的边侧固定有安装耳,所述旋转座上开设有调节槽,且调节槽与活动块相互连接,并且活动块上安装有复位弹簧,同时复位弹簧与旋转座相互连接,所述活动块位于调节槽外的部分安装有第一万向轴,且第一万向轴与弹簧伸缩杆的顶端相互连接,所述第二万向轴安装在工作球的顶部,且工作球与底座相互连接,并且底座的底端固定有基板。虽然,该可全方位调整角度的机械焊接臂,采用新型的结构设计,使得本装置可以稳定的高度和角度的调节,并且能够稳定的进行旋转调节,保证固定有焊接工具的结构,可以稳定的进行位置的调整,结构稳定且操作便捷,但是,在实际使用中发现,其上的固定座是通过螺栓与外界的焊接工位进行固定,且螺栓数量在两个以上,固定方式较为传统,且繁琐,并且装置由于其材质原因,整体的质量较重,在依次拧进螺栓时,还需一边将其拖着一边拧螺栓,托举时间较长,对于后期的拆换检修工作来说,负担较重。
4.因此,有必要提供一种新的可全方位调整角度的机械焊接臂解决上述技术问题。
技术实现要素:
5.本实用新型解决的技术问题是提供一种拆装过程简单快捷,省时省力,便于后期拆换检修的可全方位调整角度的机械焊接臂。
6.为解决上述技术问题,本实用新型提供的可全方位调整角度的机械焊接臂包括:焊接臂本体以及设置在焊接臂本体上的固定座和基板;连接座,所述连接座设置在所述焊接臂本体的上方,且所述连接座的底部与所述固定座相接触;矩形槽,所述矩形槽开设在所述固定座的顶部;矩形框体,所述矩形框体设置在所述矩形槽内,且所述矩形框体的顶部与所述连接座固定连接;两个定位槽,两个所述定位槽分别开设在所述矩形槽的两侧内壁上;两个定位插块,两个所述定位插块均设置在所述矩形框体内,两个所述定位插块相互远离的一侧均延伸至对应的所述定位槽内,且所述定位插块与所述矩形框体活动连接;通槽,所述通槽开设在所述连接座上;横接板,所述横接板固定安装在所述通槽内;内螺纹钢管,所述内螺纹钢管转动安装在所述横接板上;紧压螺杆,所述紧压螺杆螺纹安装在所述内螺纹钢管内;联动板,所述联动板设置在所述横接板的下方,所述紧压螺杆的底端与所述联动板相抵触;两个衔接杆,两个所述衔接杆分别铰接在所述联动板的两侧,且两个所述衔接杆的
底端均延伸至所述矩形框体内并与对应的所述定位插块相铰接,所述衔接杆与所述连接座的底部活动连接,所述衔接杆与所述矩形框体的顶部活动连接。
7.优选的,所述连接座的一侧转动安装有转杆,所述转杆的一端延伸至所述通槽内,且所述转杆和所述内螺纹钢管上均固定套设有锥形齿轮,两个所述锥形齿轮相啮合。
8.优选的,所述横接板的底部固定安装有两个滑杆,所述滑杆的底端与所述通槽的底部内壁固定连接,且所述滑杆贯穿所述联动板并与所述联动板滑动连接。
9.优选的,所述通槽的底部内壁上固定安装有三个压簧,三个所述压簧的顶端均与所述联动板固定连接。
10.优选的,所述矩形框体内固定安装有四个竖板,两个所述定位插块相互靠近的一侧均固定安装有横杆,两个所述横杆均贯穿相对应的两个所述竖板并与相对应的两个所述竖板滑动连接。
11.优选的,所述固定座的一侧通过螺栓固定安装有侧杆,所述侧杆上固定安装有匚型架,所述基板的一侧延伸至所述匚型架内并与所述匚型架的底部内壁相接触。
12.优选的,所述匚型架的顶部螺纹安装有顶丝,所述顶丝的底端与所述基板相抵触。
13.与相关技术相比较,本实用新型提供的可全方位调整角度的机械焊接臂具有如下有益效果:
14.本实用新型提供一种可全方位调整角度的机械焊接臂,通过设置的定位槽与定位插块之间的插接,以及矩形槽和矩形框体之间的配合,便可对焊接臂本体形成卡持固定,并且,再通过转动转杆的方式,便可实现定位插块与定位槽之间的插接与分离,拆装过程简单快捷,相较于传统的螺栓安装,一方面减少对焊接臂本体的托举时间,降低负担,另一方面通过快速的拆装能够方便人们进行效率高的检修维护工作,此外,通过设置的能够拆卸的侧杆以及其上的匚型架和顶丝,能够在适当时候将其固定在固定座上,然后通过顶丝将基板抵住,使得焊接臂本体上的零部件不会发生自然角度转动,减少零部件机械损耗,提高其使用寿命。
附图说明
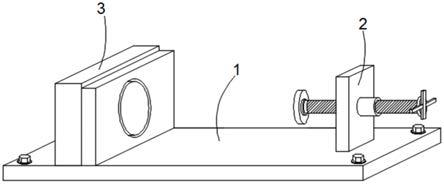
15.图1为本实用新型提供的可全方位调整角度的机械焊接臂的一种较佳实施例的结构示意图;
16.图2为图1所示的a部放大示意图;
17.图3为图2所示的b部放大示意图;
18.图4为图1所示的c部放大示意图。
19.图中标号:1、焊接臂本体;2、固定座;3、基板;4、连接座;5、矩形槽;6、矩形框体;7、定位槽;8、定位插块;9、通槽;10、横接板;11、内螺纹钢管;12、紧压螺杆;13、联动板;14、衔接杆;15、侧杆;16、匚型架。
具体实施方式
20.下面结合附图和实施方式对本实用新型作进一步说明。
21.请结合参阅图1、图2、图3和图4,其中,图1为本实用新型提供的可全方位调整角度的机械焊接臂的一种较佳实施例的结构示意图;图2为图1所示的a部放大示意图;图3为图2
所示的b部放大示意图;图4为图1所示的c部放大示意图。可全方位调整角度的机械焊接臂包括:焊接臂本体1以及设置在焊接臂本体1上的固定座2和基板3;连接座4,所述连接座4设置在所述焊接臂本体1的上方,且所述连接座4的底部与所述固定座2相接触;矩形槽5,所述矩形槽5开设在所述固定座2的顶部;矩形框体6,所述矩形框体6设置在所述矩形槽5内,且所述矩形框体6的顶部与所述连接座4固定连接,利用矩形框体6与矩形槽5之间的配合,能够对焊接臂本体1形成前后左右的活动限制,使其不可被前后左右的拉动;两个定位槽7,两个所述定位槽7分别开设在所述矩形槽5的两侧内壁上;两个定位插块8,两个所述定位插块8均设置在所述矩形框体6内,两个所述定位插块8相互远离的一侧均延伸至对应的所述定位槽7内,且所述定位插块8与所述矩形框体6活动连接,通过定位插块8和定位槽7之间的卡接,能够在矩形框体6与矩形槽5配合的基础上,对固定座2形成上下活动的限制,从而完成对焊接臂本体1的安装工作;通槽9,所述通槽9开设在所述连接座4上;横接板10,所述横接板10固定安装在所述通槽9内;内螺纹钢管11,所述内螺纹钢管11转动安装在所述横接板10上,内螺纹钢管11采用钢材制成,能够与紧压螺杆12形成良好的机械传动性能,传动顺滑平稳;紧压螺杆12,所述紧压螺杆12螺纹安装在所述内螺纹钢管11内,在紧压螺杆12的顶端固定有面板,面板的底部固定有限制杆,限制杆贯穿横接板10并与横接板10滑动连接,从而能够对紧压螺杆12的运动方向提供限制;联动板13,所述联动板13设置在所述横接板10的下方,所述紧压螺杆12的底端与所述联动板13相抵触;两个衔接杆14,两个所述衔接杆14分别铰接在所述联动板13的两侧,且两个所述衔接杆14的底端均延伸至所述矩形框体6内并与对应的所述定位插块8相铰接,所述衔接杆14与所述连接座4的底部活动连接,所述衔接杆14与所述矩形框体6的顶部活动连接,在连接座4的底部开设有与通槽9连通的两个滑口一,两个衔接杆14便均贯穿对应的滑口一,而在矩形框体6的顶部开设有两个滑口二,两个滑口二分别和两个滑口一相对应,且两个衔接杆14便均贯穿对应的滑口二。
22.所述连接座4的一侧转动安装有转杆,所述转杆的一端延伸至所述通槽9内,且所述转杆和所述内螺纹钢管11上均固定套设有锥形齿轮,两个所述锥形齿轮相啮合,在横接板10上还固定有加强板,转杆贯穿该加强板并与之转动连接,从而能够对转杆提供加强点,使其转动的更加平稳。
23.所述横接板10的底部固定安装有两个滑杆,滑杆能为联动板13提供稳定的上下滑动位置,不会发生偏移,使得压簧的压缩与拉伸能够直上直下的进行,不会发生弯曲,所述滑杆的底端与所述通槽9的底部内壁固定连接,且所述滑杆贯穿所述联动板13并与所述联动板13滑动连接。
24.所述通槽9的底部内壁上固定安装有三个压簧,三个所述压簧的顶端均与所述联动板13固定连接,压簧能够为联动板13提供回弹性能,使联动板13随着紧压螺杆12的上升而自动上升。
25.所述矩形框体6内固定安装有四个竖板,两个所述定位插块8相互靠近的一侧均固定安装有横杆,两个所述横杆均贯穿相对应的两个所述竖板并与相对应的两个所述竖板滑动连接,四个竖板两两为一组,两个横杆便分别处于两个竖板上,从而使定位插块8能够进行稳定的水平运动。
26.所述固定座2的一侧通过螺栓固定安装有侧杆15,利用螺栓对侧杆15形成可拆卸式的功能,使其能够在实际需要使用到时被安装使用,当焊接臂本体1在进行焊接工作时,
为了不妨碍其焊接工作的进行,一般将其拆下,所述侧杆15上固定安装有匚型架16,所述基板3的一侧延伸至所述匚型架16内并与所述匚型架16的底部内壁相接触。
27.所述匚型架16的顶部螺纹安装有顶丝,所述顶丝的底端与所述基板3相抵触,利用顶丝对其的抵触,能够有效防止焊接臂本体1上的万向转动零部件发生较深程度的旋转,减少机械损耗。
28.本实用新型提供的可全方位调整角度的机械焊接臂的工作原理如下:
29.在本装置中,连接座4与焊接工位固定连接,且初始状态下,紧簧为压缩状态;
30.当需要将焊接臂本体1拆下进行检修维护时,只需顺时针转动转杆,通过两个锥形齿轮的啮合,便可带动内螺纹钢管11转动,这时,通过其与紧压螺杆12的螺纹关系,紧压螺杆12开始上升,随着紧压螺杆12的逐渐上升,紧簧开始释放弹力,联动板13便会随着一起上升,从而在两个衔接杆14的连带下,并在定位插块8上的横杆的滑动限制下,两个定位插块8开始做相互靠近的运动,从而逐渐从定位槽7内移出,直至紧压螺杆12上升至最高位置后,此时的定位插块8便已完全从定位槽7内移出,从而使固定座2失去了卡持限制,然后将焊接臂本体1连带着固定座2抽出即可,随后进行相应的检修拆换维护;
31.之后安装时,一样的,只需拖着焊接臂本体1,使矩形框体6插入矩形槽5内,然后逆时针转动转杆,紧压螺杆12便带着联动板13下降,紧簧开始压缩,且两个定位插块8相互远离,最终插入对应的定位槽7内,进而完成安装;
32.且在后期的使用中,若焊接臂本体1需要进行封存或者长时间的停运时,为了防止零部件发生机械性的自然转动,便可利用匚型架16上的顶丝将基板3抵住,从而能够保证焊接臂本体1的内部零部件不会发生自然转动,提高零部件使用寿命。
33.与相关技术相比较,本实用新型提供的可全方位调整角度的机械焊接臂具有如下有益效果:
34.本实用新型提供一种可全方位调整角度的机械焊接臂,通过设置的定位槽7与定位插块8之间的插接,以及矩形槽5和矩形框体6之间的配合,便可对焊接臂本体1形成卡持固定,并且,再通过转动转杆的方式,便可实现定位插块8与定位槽7之间的插接与分离,拆装过程简单快捷,相较于传统的螺栓安装,一方面减少对焊接臂本体1的托举时间,降低负担,另一方面通过快速的拆装能够方便人们进行效率高的检修维护工作,此外,通过设置的能够拆卸的侧杆15以及其上的匚型架16和顶丝,能够在适当时候将其固定在固定座2上,然后通过顶丝将基板3抵住,使得焊接臂本体1上的零部件不会发生自然角度转动,减少零部件机械损耗,提高其使用寿命。
35.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。