1.本发明涉及机床加工技术领域,尤其涉及一种分布式加工系统。
背景技术:
2.随着技术的创新,当前需要对一些大型工业零部件进行加工制造,这种大型工业零部件往往需要昂贵的大型专用设备来进行加工制作,甚至按工序需求需要多台不同的大型设备才能完成加工制造任务。比如大型船用螺旋桨需要大型铣床、大型车床等多个加工设备配合来完成。
3.虽然这些设备能满足生产加工需求,但也有一些不可避免的缺点:加工设备一般都只设计有一个主轴、加工效率低,同时因受制于技术现状现有技术所使用的大型加工设备一般为大型设备,机床价格及其昂贵,例如加工船用螺旋桨所用的设备加工费用很高,且后期使用、维护保养费等也居高不下。这些严重制约了大型零部件的生产制造。
技术实现要素:
4.本发明提供一种分布式加工系统,系统加工效率高,一次找准定位后,实现分布加工,或同步加工,满足多种加工需求。
5.系统包括:安装平台、多个加工单元,其中加工单元由移动平台、位姿标记装置及加工设备组成,位姿标记装置同加工设备安装在移动平台,移动平台通过磁力或其他固定方式连接到安装平台上,实现加工单元与安装平台的连接;
6.加工时工件靠自身自重或其他紧固方式固定在加工场地的地基上;安装平台或作为一种基础设施铺设在加工场地内,或靠近工件临时搭建。
7.安装平台上提供可供移动平台移动及固定的平面支撑;
8.移动平台底部包含可伸缩的行走装置,行走装置在机电系统控制下可实现移动平台在安装平台上的自由移动;
9.行走机构优先选用可全向移动的麦克姆轮;
10.移动平台还包含可供吊装用的吊环,用于通过其行走机构不能到达的安装位置,可通过吊装设备将加工单元吊运所需的安装设备。
11.加工设备通过螺钉固定到移动平台上;
12.进一步需要说明的是,移动平台可内置强磁吸附装置,移动平台移动至加工位置后可吸附在铁制安装平台上;
13.进一步需要说明的是,移动平台也可通过紧固螺栓等装置,将移动平台固定在安装平台上;
14.进一步需要说明的是,工件为大型工件,如船用螺旋桨;
15.大型船用螺旋桨固设到加工场地的地基上;
16.多个加工单元布置在每个螺旋桨周边,通过强磁吸附在桨叶周边安装平台上,进行加工作业。
17.进一步需要说明的是,还包括:激光测量模块和加工数据管控服务器;
18.加工数据管控服务器监测工件坐标系和加工单元坐标系;
19.工件上安装有多个用于标定工件位置的位姿标记装置;
20.加工单元的移动平台上安装有多个用于标定加工单元位置的位姿标记装置;
21.激光测量模块通过加工单元位姿标记装置确定加工单元在工件坐标系下的相对位姿。
22.加工数据管控服务器对接收的各加工单元位姿数据进行处理,依据控制指令规划各加工单元的加工位置,控制各加工单元自行移动至各自加工位置处,在加工单元通过自身能力不能到达指定位置时提示需要人工干预,列出相应的移动指令,加工现场工人根据移动指令将指定的加工单元吊装或通过其他方式转运至安装平台的指定位置,加工单元移动就位后通过磁力或螺栓等方式固定在安装平台上。
23.各加工单元在指定位置固定后,激光测量模块再一次对各加工单元进行位姿的精确标定,精确获取加工单元与工件的相对位姿;
24.加工设备固定安装在加工单元的移动平台上,加工设备的自身坐标系相对于加工单元的坐标系固定,结合激光测量模块标定的加工单元在工件坐标系下的相对位姿,加工数据管控服务器可标定加工单元中加工设备坐标系在工件坐标系中相对位姿;
25.激光测量模块分别对工件位姿标记装置及多个加工单元的位姿标记装置进行标定,可准确获取多个加工单元中加工设备坐标系相对于工件坐标系的位姿数据,并将相对位姿数据上传给加工数据管控服务器;
26.数据管控服务器将各加工单元中加工设备的运行指令下发,各加工单元中加工设备依据指令对指定的工件部位进行加工;
27.加工单元加工完指定加工部位后,数据管控服务器将根据指令要求控制或提示将加工单元移至下一个加工位置,精确标定位置后进行下一区域的加工。
28.进一步需要说明的是,除上述布置外,也可将工件固定在移动装置上,在加工过程中通过移动装置等实现工件的分段平移或分段旋转,进一步提高加工的灵活性;
29.进一步需要说明的是,系统包括:移动装置,加工设备,移动平台上固设有工件和位姿标记装置,加工设备固设在加工场地上,加工设备上安装有多个位姿标记装置;
30.进一步说明的是工件移动装置上安装有多个用于标定工件位置的位姿标记装置;
31.加工设备上安装有多个用于标定加工设备位置的位姿标记装置;
32.激光测量模块通过加工设备位姿标记装置确定加工设备在工件坐标系下的相对位姿。
33.加工数据管控服务器对接收的各加工设备和移动装置位姿数据进行处理,依据控制指令规划移动装置的位置,控制移动装置将工件移动至各自加工位置处,通过加工设备进行分段加工。
34.工件在指定位置固定后,激光测量模块再一次对各加工设备进行位姿的精确标定,精确获取加工设备与工件的相对位姿;
35.工件固定安装在移动装置上,工件的自身坐标系相对于移动装置的坐标系固定,结合激光测量模块标定的加工设备在工件坐标系下的相对位姿,加工数据管控服务器可标定加工设备在工件坐标系中相对位姿;
36.激光测量模块分别对工件位姿标记装置及多个加工设备的位姿标记装置进行标定,可准确获取多个加工设备坐标系相对于工件坐标系的位姿数据,并将相对位姿数据上传给加工数据管控服务器;
37.数据管控服务器将各加工设备的运行指令下发,各加工设备依据指令对指定的工件部位进行加工;
38.加工设备加工完指定加工部位后,数据管控服务器将根据指令要求控制将工件移至下一个加工位置,精确标定位置后进行下一区域的加工。
39.从以上技术方案可以看出,本发明具有以下优点:
40.本发明提供的加工系统,可根据工件的轮廓形状及实际加工要求合理排布加工单元的位置,使各加工单元都能共同配合,同时对一件工件进行加工,避免需要多次重新找正,找平,校准等前期准备的问题,缩短加工时间,提高了加工件的精度和质量。
41.本发明提供的加工方式把多台大型机床按照工序加工的加工方式简化成多种小型专用机床同时加工,多台专用机床由管控系统统一控制分配加工程序,分别执行所在加工区域的加工任务,同时对零部件进行加工,这样就从“大而少”变成了“小而多”,可以极大地提高加工效率,降低生产成本,缩短生产周期,提高产能。
附图说明
42.为了更清楚地说明本发明的技术方案,下面将对描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
43.图1为大型船用螺旋桨加工示意图;
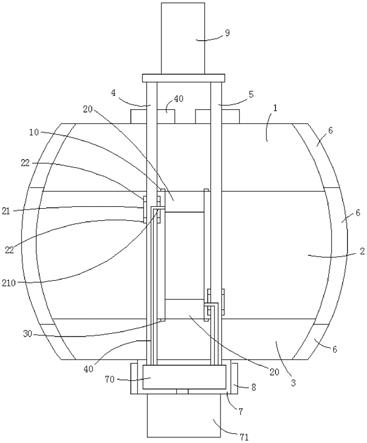
44.图2为一个加工单元的组成示意;
45.图3为分布式加工系统控制逻辑实施例示意图;
46.图4为分布式加工系统另一实施例示意图。
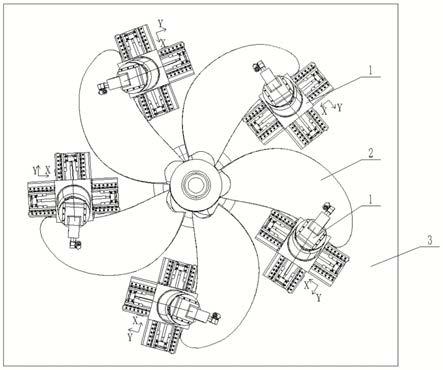
47.图5为大型船用螺旋桨的另一种加工侧向布置示意图。
48.图6为大型船用螺旋桨的另一种加工俯视图。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.本发明提供的分布式加工系统中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
51.本发明提供的分布式加工系统的附图中所示的方框图仅仅是功能实体,不一定必
须与物理上独立的实体相对应。即,可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
52.本发明提供的分布式加工系统中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口、装置或单元的间接耦合或通信连接,也可以是电的,机械的或其它的形式连接。
53.本发明提供的分布式加工系统中,提供了多种加工方式,其中包括了工件不动,由加工单元1进行移动来实现加工过程。可以基于加工单元1不动,而工件移动实现加工过程。还可以基于加工单元1和工件都移动来实现加工过程。
54.对于本发明来讲,工件可以是任何被加工件,比如大型船用螺旋桨,大型机加工工件,涡轮叶片等。无法使用单一加工单元来进行固定加工,需要多个加工单元1配合来实现加工的工件。
55.具体的讲本发明中,如图1至3所示,包括:安装平台3,安装平台3上连接有加工单元1;加工单元1由移动平台8,加工设备4和位姿标记装置6组成;加工设备固定连接在移动平台上;移动平台8内部可置有强磁吸附装置9或紧固螺栓等装置,能稳定吸附或固定在安装平台上;移动平台底部包含可伸缩的行走装置10,行走装置在机电系统控制下可实现移动平台在安装平台上的自由移动;移动平台还包含可供吊装用的吊环7,用于通过其行走机构不能到达的安装位置,可通过吊装设备将加工单元吊运所需的安装设备。
56.在进行加工时,为了保证机床加工过程的稳定性,加工时通过移动平台内置的强磁吸附或紧固螺栓等装置固定在安装平台1上。
57.本发明中,为了能够实现自动化控制,系统还包括:激光测量模块和加工数据管控服务器12;
58.加工数据管控服务器12监测工件坐标系和加工单元坐标系;
59.激光测量模块通过加工单元位姿标记和工件位姿标记装置确定加工单元在工件坐标系下的相对位姿。
60.加工数据管控服务器12对接收的各加工单元位姿数据进行处理,依据控制指令规划各加工单元的加工位置,控制各加工单元自行移动至各自加工位置处,在加工单元通过自身能力不能到达指定位置时提示需要人工干预,列出相应的移动指令,加工现场工人根据移动指令将指定的加工单元吊装或通过其他方式转运至安装平台的指定位置,加工单元移动就位后通过磁力或螺栓等方式固定在安装平台上。
61.各加工单元在指定位置固定后,激光测量模块再一次对各加工单元进行位姿的精确标定,精确获取加工单元与工件的相对位姿;
62.对于本实施例来讲,移动平台上设有多个用于标定加工设备4位置的位姿标记装置6;激光测量模块获取每个位姿标记装置6的位姿数据,数据管控服务器12激光测量模块获取的数据进行分析计算并发出控制指令。
63.对于本发明的另一种加工形式来讲,如图4所示,将工件固定在移动装置11上,在
加工过程中通过移动装置11实现工件的分段平移或分段旋转,这一过程中加工设备可以移动也可以作为常规固定加工设备。
64.具体的讲本发明中,如4所示,包括:移动装置11,移动装置11上固设有工件13;移动装置上安装有位姿标记装置6。加工设备4固设在加工场地内,每台加工设备上安装有多个位姿标记装置6。
65.加工数据管控服务器12通过获取分析加工设备与工件的相对位姿数据,确定最佳布置加工方案,通过移动工件来改变加工设备与工件的相对坐标。
66.本发明中,为了能够实现自动化控制,系统还包括:激光测量模块和加工数据管控服务器12;
67.加工数据管控服务器12监测工件坐标系和加工设备坐标系;
68.激光测量模块通过加工设备位姿标记装置和工件位姿标记装置的位姿数据确定加工设备在工件坐标系下的相对位姿。
69.加工数据管控服务器12对接收的工件的位姿数据进行处理,依据控制指令规划工件的加工位置,控制工件自行移动至各自加工位置处。
70.工件在指定位置固定后,激光测量模块再一次对工件进行位姿的精确标定,精确获取加工设备与工件的相对位姿。
71.附图5和图6还表述了大型船用螺旋桨的另一中加工示例;阵列式加工,示例中工件和加工设备连接在同一底座基体a1上,工件a3固定在可联动升降和回转的工作台a2上,工作台圆周阵列安装加工设备a4,示例中使用的加工设备是机械手臂也可是其他设备;加工设备安装的底座上铺设有可沿径向移动的移动平台。
72.因工件和加工设备连接在同一底座基体上,加之设备零部件加工与装配精度的提升,这种系统可不使用位姿标记装置。加工时通过加工设备和工作台的联动,进行工件与加工设备的坐标变换,实现多台设备同时对同一零部件不同部位进行加工;当设备完成当前部位的加工后,通过工作台的升降和旋转使设备对工件其他部位进行加工。
73.对于本发明来讲,加工设备4可根据不同零部件的加工需求设计为3轴、4轴、5轴等多轴加工机床或者多轴机械手臂,其中3轴加工机床为包含x、y、z轴的机床结构,主要针对形状简单、易于加工的零部件,4轴加工机床主要是针对有部分简单曲面的零部件,其结构主要是在3轴机床上增加a或b摆头实现简单的曲面加工,5轴机床主要针对复杂曲面的零部件加工(船用螺旋桨、涡轮叶片等),其结构主要为x/y/z/a/b轴结构等。机床可根据工件的轮廓形状及实际加工要求合理排布机床加工位置,使各个机床都能共同配合,同时对一件工件进行加工,缩短加工时间。
74.本发明提供的加工方式把多台大型机床按照工序分步加工的加工方式简化成多种小型专用机床同时加工,多台专用机床由管控系统统一控制分配加工程序,分别执行所在加工区域的加工任务,同时对零部件进行加工,这样就从“大而少”变成了“小而多”,可以极大地提高加工效率,降低生产成本,缩短生产周期,提高产能。
75.本发明提供的分布式加工系统是结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专
业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
76.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。