1.本发明涉及一种联动加工机床,尤其涉及一种立卧两用联动加工机床。
背景技术:
2.产品的制作过程中,一般都是需要经过多道工序才能完成制作,对工件加工时,则需要使用到加工机床将工件加工成需求的形状。
3.申请号为cn202121854447.7的中国专利公开了一种卧式加工机床,所述卧式加工机床包括机床底座、刀库、用以支撑所述刀库的刀库支架、固定在所述机床底座上用以支撑所述刀库支架的支架底座、设置在所述刀库支架和所述支架底座之间的横向调整块,所述横向调整块用以调整所述刀库支架与所述支架底座之间的相对位置。本发明的卧式加工机床,通过设置刀库支架和支架底座,从而可以将刀库固定在所述机床底座上,起到支撑所述刀库的效果,上述专利虽然能够对工件进行加工,但工件加工好一部分后,需要停下将工件位置调整好才能被全面加工,导致工作效率低。
4.本发明旨在解决上述专利中存在的问题,为此,提出一种能够对工件进行全面加工,无需对工件位置进行调整,工作效率高的立卧两用联动加工机床。
技术实现要素:
5.为了克服上述专利虽然能够对工件进行加工,但工件加工好一部分后,需要停下将工件位置调整好才能被全面加工,导致工作效率低的缺点,本发明提供一种能够对工件进行全面加工,无需对工件位置进行调整,工作效率高的立卧两用联动加工机床。
6.本发明通过以下技术途径实现:
7.一种立卧两用联动加工机床,包括有框体、回型壳、回型板、控制器、滑动框、下料斗、固定座、摆动架、加工主轴、操作平台、封闭机构和驱动机构,框体顶部中间固定穿接有用于对铁屑进行导向的下料斗,框体外顶部右侧固接有回型壳,下料斗顶端贯穿回型壳底部中间,回型壳内前后两侧面下部右侧之间安装有操作平台,回型壳右侧面固接有回型板,回型板外底部与框体外顶部右侧固定连接,回型板右侧面中部后侧安装有控制器,回型壳外侧滑动式的套装有滑动框,滑动框外底部与框体外顶部接触,回型壳内底部左侧前后对称固接有固定座,固定座上转动式的穿接有转轴,转轴内端固接有摆动架,前后两侧摆动架上部之间安装有加工主轴,转轴与框体外侧之间安装有用于提供驱动力的驱动机构,驱动机构贯穿滑动框,回型板中部滑动式的连接有用于对迸射的铁屑进行阻挡的封闭机构。
8.进一步说明,封闭机构包括有玻璃门、铁架和把手,回型板左侧面中部都前后对称嵌入式的滑动连接有用于对迸射的铁屑进行阻挡的玻璃门,前后两侧玻璃门右侧面中部安装有铁架,前侧玻璃门右侧面中部后侧与后侧玻璃门右侧面中部前侧都固接有把手。
9.进一步说明,驱动机构包括有l型块、伺服电机和驱动轴,框体外前后两侧面上部左侧都固接有l型块,l型块顶端固接有伺服电机,伺服电机的输出轴端部固接有用于带动转轴转动的驱动轴,驱动轴内端贯穿回型壳和滑动框与转轴外端固定连接。
10.进一步说明,还包括有用于带动滑动框移动的辅助机构,辅助机构包括有触发杆、弧形框、固定杆、缓冲块和第一弹簧,滑动框内前后两侧面下部左侧固接有三根固定杆,前侧三根固定杆内端之间与后侧三根固定杆内端之间都固接有弧形框,弧形框右端位于回型壳内,弧形框内底部连接有第一弹簧,第一弹簧尾端固接有用于提供缓冲力的缓冲块,前后两侧摆动架外侧面上部都固接有用于带动弧形框向左移动的触发杆,触发杆位于弧形框内,触发杆向下摆动与缓冲块接触。
11.进一步说明,还包括有用于对铁屑进行推动的搅动机构,搅动机构包括有拉杆、滑块、限位框、栅格板和回型滑板,框体内前后两侧面上部右侧滑动式的连接有滑块,滑块内端固接有限位框,前后两侧限位框下部之间转动式的连接有用于对铁屑进行搅动的栅格板,框体前后两侧中部都滑动式的穿接有拉杆,前后两侧拉杆内端之间固接有用于带动栅格板移动的回型滑板,回型滑板套在栅格板上。
12.进一步说明,还包括有n型板和接触辊,滑动框外底部与框体外顶部都前后对称开有凹槽,上方凹槽顶部右侧均匀间隔的固接有五块n型板,n型板前后两侧之间转动式的连接有用于对滑动框进行导向的接触辊,接触辊位于下方凹槽内。
13.进一步说明,还包括有u型板、刮板和第二弹簧,回型板左侧面前后对称固接有u型板,u型板内左侧面嵌入式的滑动连接有用于将玻璃门上的杂质清除的刮板,刮板右侧面与玻璃门左侧面接触,刮板左侧面与u型板内侧之间均匀间隔的连接有十根第二弹簧。
14.进一步说明,把手外侧为橡胶材质。
15.本发明其显著进步在于:
16.1、拉动封闭机构打开,通过工装将工件固定在操作平台上,拉动封闭机构关闭,再通过控制器启动加工主轴对工件进行加工,工件一部分加工好后,启动驱动机构通过转轴带动摆动架向下摆动,摆动架向下摆动带动加工主轴向下摆动至最大行程,加工主轴对工件进行全面加工,如此,无需对工件位置进行调整使得工件被全面加工,工作效率高。
17.2、在辅助机构的作用下,每当摆动架带动加工主轴向下摆动时,摆动架还带动辅助机构运作,辅助机构运作带动滑动架向左移动至最大行程,摆动架复位时,摆动架还带动滑动框向右移动复位,如此,无需操作人员用手拉动滑动框向左移动或者向右移动,比较方便。
18.3、在搅动机构的作用下,每当框体内堆积有适量的铁屑时,操作人员拉动搅动机构向左移动,搅动机构向左移动对铁屑进行搅动,如此,可避免铁屑掉落集中在框体内底部一个位置影响后续收集。
附图说明
19.图1为本发明的第一种立体结构示意图。
20.图2为本发明的第二种立体结构示意图。
21.图3为本发明的第一种部分剖视结构示意图。
22.图4为本发明的第二种部分剖视结构示意图。
23.图5为本发明的第三种部分剖视结构示意图。
24.图6为本发明的第四种部分剖视结构示意图。
25.图7为本发明a部分的放大示意图。
26.图8为本发明b部分的放大示意图。
27.图9为本发明的第五种部分剖视结构示意图。
28.图10为本发明c部分的放大示意图。
29.图中附图标记的含义:1:框体,2:回型壳,3:回型板,4:控制器,5:滑动框,6:下料斗,7:固定座,8:摆动架,81:转轴,9:加工主轴,10:操作平台,11:封闭机构,111:玻璃门,112:铁架,113:把手,12:驱动机构,121:l型块,122:伺服电机,123:驱动轴,13:辅助机构,131:触发杆,132:弧形框,133:固定杆,134:缓冲块,135:第一弹簧,14:搅动机构,141:拉杆,142:滑块,143:限位框,144:栅格板,145:回型滑板,15:凹槽,16:n型板,17:接触辊,18:u型板,19:刮板,20:第二弹簧。
具体实施方式
30.以下结合说明书附图进一步阐述本发明、并结合说明书附图给出本发明的实施例。
31.实施例1
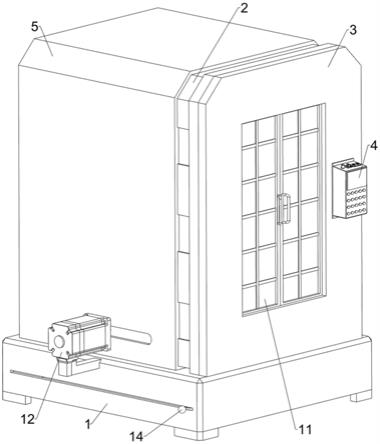
32.一种立卧两用联动加工机床,包括有框体1、回型壳2、回型板3、控制器4、滑动框5、下料斗6、固定座7、摆动架8、加工主轴9、操作平台10、封闭机构11和驱动机构12,请参阅图1-图4所示,框体1顶部中间通过焊接连接的方式穿接有下料斗6,下料斗6可实现对铁屑进行导向,框体1外顶部右侧通过焊接连接的方式安装有回型壳2,下料斗6顶端贯穿回型壳2底部中间,回型壳2内前后两侧面下部右侧之间安装有操作平台10,回型壳2右侧面固接有回型板3,回型板3外底部与框体1外顶部右侧固定连接,回型板3右侧面中部后侧安装有控制器4,回型壳2外侧滑动式的套装有滑动框5,滑动框5外底部与框体1外顶部接触,回型壳2内底部左侧前后对称通过焊接连接的方式安装有固定座7,固定座7上转动式的穿接有转轴81,转轴81内端固接有摆动架8,前后两侧摆动架8上部之间安装有加工主轴9,控制器4可以控制加工主轴9运作,转轴81与框体1外侧之间安装有驱动机构12,驱动机构12贯穿滑动框5,当驱动机构12启动时,驱动机构12可实现通过转轴81带动摆动架8摆动,回型板3中部滑动式的连接有封闭机构11,封闭机构11可实现对迸射的铁屑进行阻挡。
33.封闭机构11包括有玻璃门111、铁架112和把手113,请参阅图1和图3所示,回型板3左侧面中部都前后对称嵌入式的滑动连接有玻璃门111,玻璃门111可实现对迸射的铁屑进行阻挡,前后两侧玻璃门111右侧面中部安装有铁架112,前侧玻璃门111右侧面中部后侧与后侧玻璃门111右侧面中部前侧都固接有把手113,把手113外侧为橡胶材质,操作人员可拉动把手113带动玻璃门111滑动。
34.驱动机构12包括有l型块121、伺服电机122和驱动轴123,请参阅图1、图3和图4所示,框体1外前后两侧面上部左侧都通过焊接连接的方式安装有l型块121,l型块121顶端固接有伺服电机122,伺服电机122的输出轴端部通过联轴器连接有驱动轴123,驱动轴123内端贯穿回型壳2和滑动框5与转轴81外端固定连接,当驱动轴123转动时,驱动轴123可实现带动转轴81转动。
35.首先操作人员拉动封闭机构11打开,封闭机构11不将回型壳2内封闭,再通过工装将需要加工的工件固定在操作平台10上,工件与操作平台10之间有一定间隙,工件放置好后,拉动封闭机构11关闭,再调节好控制器4的加工数据,通过控制器4启动加工主轴9,加工
主轴9启动对工件进行加工,加工过程中出现的铁屑掉落至下料斗6内,下料斗6内的铁屑掉落至框体1内,工件的一部分加工完成后,通过控制器4关闭加工主轴9,拉动滑动框5向左移动至最大行程,启动驱动机构12,驱动机构12运作带动转轴81反转,转轴81反转带动摆动架8向下摆动,摆动架8向下摆动带动加工主轴9向下摆动,摆动架8向下摆动至最大行程时,关闭驱动机构12,驱动机构12停止带动转轴81反转,转轴81停止摆动架8向下摆动,摆动架8停止带动加工主轴9向下摆动,即可开始通过控制器4启动加工主轴9,加工主轴9继续对工件未加工的部分进行加工,当工件完全加工完成后,通过控制器4关闭加工主轴9,启动驱动机构12带动转轴81正转复位,转轴81正转复位带动摆动架8向上摆动复位,摆动架8向上摆动复位带动加工主轴9向上摆动复位,推动滑动框5向右移动复位,再拉动封闭机构11打开,即可将加工后的工件从操作平台10上取下,工件取下后,拉动封闭机构11关闭,如此反复,可不断的对工件进行加工,当框体1内装有适量的铁屑时,操作人员将框体1内的铁屑取出进行后续处理。
36.首先操作人员握住把手113,拉动把手113向外移动,由于把手113外侧为橡胶材质,能增大与手的摩擦力,使得操作人员更稳固的握住把手113,把手113向外移动带动玻璃门111向外移动,玻璃门111向外移动带动铁架112向外移动,玻璃门111向外移动不将回型壳2内封闭,停止拉动把手113带动玻璃门111向外移动,将工件放在操作平台10上,工件放置好后,拉动把手113带动玻璃门111向内移动复位,玻璃门111带动铁架112向内移动复位,即可开始对工件进行加工,玻璃门111则能将迸射的铁屑挡住,铁架112使得玻璃门111更加牢固。当工件完全加工好后,拉动把手113带动玻璃门111向外移动至最大行程,再将加工好的工件从操作平台10上取出,工件取出后,拉动把手113带动玻璃门111向内移动复位。
37.当工件一部分加工好后,且操作人员拉动滑动框5向左移动至最大行程时,启动伺服电机122反转,伺服电机122反转带动驱动轴123反转,驱动轴123反转带动转轴81反转,转轴81反转带动摆动架8向下摆动,摆动架8向下摆动带动加工主轴9向下摆动,摆动架8向下摆动至最大行程时,关闭伺服电机122,伺服电机122停止带动驱动轴123反转,驱动轴123停止带动转轴81反转,摆动架8也就停止带动加工主轴9向下摆动,即可继续对工件进行加工,当工件完全加工好后,启动伺服电机122正转带动驱动轴123正转复位,驱动轴123正转复位带动转轴81正转复位,转轴81正转复位带动摆动架8向上摆动复位,摆动架8向上摆动复位带动加工主轴9向上摆动复位,关闭伺服电机122,驱动轴123停止带动转轴81正转,摆动架8停止带动加工主轴9向上摆动。
38.实施例2
39.在实施例1的基础上,还包括有辅助机构13,辅助机构13包括有触发杆131、弧形框132、固定杆133、缓冲块134和第一弹簧135,请参阅图3、图5、图6和图7所示,滑动框5内前后两侧面下部左侧通过焊接连接的方式安装有三根固定杆133,前侧三根固定杆133内端之间与后侧三根固定杆133内端之间都固接有弧形框132,弧形框132右端位于回型壳2内,弧形框132内底部通过焊接连接的方式安装有第一弹簧135,第一弹簧135尾端固接有缓冲块134,缓冲块134用于提供缓冲力,前后两侧摆动架8外侧面上部都通过焊接连接的方式安装有触发杆131,触发杆131位于弧形框132内,当触发杆131向下摆动时,触发杆131可实现带动弧形框132向左移动,触发杆131向下摆动与缓冲块134接触。
40.还包括有搅动机构14,搅动机构14包括有拉杆141、滑块142、限位框143、栅格板
144和回型滑板145,请参阅图1、图3、图5、图6和图8所示,框体1内前后两侧面上部右侧滑动式的连接有滑块142,滑块142内端通过焊接连接的方式安装有限位框143,前后两侧限位框143下部之间转动式的连接有栅格板144,当栅格板144向左移动时,栅格板144可实现对铁屑进行搅动,框体1前后两侧中部都滑动式的穿接有拉杆141,前后两侧拉杆141内端之间通过焊接连接的方式安装有回型滑板145,回型滑板145套在栅格板144上,当回型滑板145移动时,回型滑板145可实现带动栅格板144移动。
41.当工件一部分加工完成后,启动伺服电机122反转,摆动架8带动加工主轴9向下摆动,摆动架8还带动触发杆131向下摆动,触发杆131向下摆动在弧形框132内滑动,触发杆131向下摆动带动弧形框132向左移动,弧形框132向左移动带动固定杆133向左移动,固定杆133向左移动带动滑动框5向左移动,进而触发杆131向下摆动与缓冲块134接触时,缓冲块134对触发杆131进行缓冲,触发杆131带动缓冲块134向下移动,第一弹簧135被压缩,摆动架8向下摆动至最大行程时,摆动架8停止带动触发杆131向下摆动,触发杆131停止带动弧形框132向左移动,弧形框132停止通过固定杆133带动滑动框5向左移动,关闭伺服电机122,即可开始继续对工件进行加工。当工件完全加工好后,启动伺服电机122正转带动驱动轴123正转复位,摆动架8也就向上摆动带动加工主轴9向上摆动复位,摆动架8还带动触发杆131向上摆动复位,触发杆131向上摆动带动弧形框132向右移动复位,弧形框132向右移动通过固定杆133带动滑动框5向右移动复位,同时,触发杆131向上摆动复位与缓冲块134脱离接触,因第一弹簧135的作用,缓冲块134向上移动复位,关闭伺服电机122。如此,无需操作人员用手拉动滑动框5向左移动或者向右移动,比较方便。
42.当框体1内掉落有适量的铁屑时,操作人员拉动拉杆141向左移动,拉杆141向左移动带动回型滑板145向左移动,回型滑板145向左移动带动栅格板144向左移动,栅格板144向左移动带动限位框143向左移动,限位框143向左移动带动滑块142向左移动,栅格板144向左移动对框体1内的铁屑进行搅动,也就使得铁屑均匀的分布在框体1内,拉杆141向左移动至最大行程时,停止拉动拉杆141向左移动,拉动拉杆141向右移动,拉杆141向右移动带动回型滑板145向右移动,回型滑板145向右移动带动栅格板144反转一定距离,栅格板144反转一定距离不与铁屑接触,回型滑板145继续向右移动带动栅格板144向右移动,栅格板144向右移动带动限位框143向右移动复位,限位框143带动滑块142向右移动复位,停止拉动拉杆141,因重力的作用,栅格板144正转一定距离复位被限位框143限位。如此,可避免铁屑掉落集中在框体1内底部一个位置影响后续收集。
43.实施例3
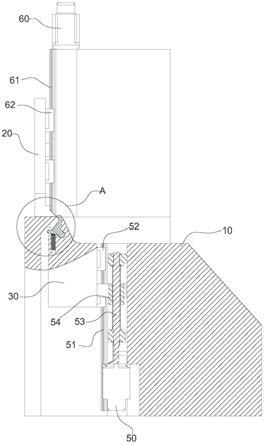
44.在实施例1和实施例2的基础上,还包括有n型板16和接触辊17,请参阅图3和图8所示,滑动框5外底部与框体1外顶部都前后对称开有凹槽15,上方凹槽15顶部右侧均匀间隔的通过焊接连接的方式安装有五块n型板16,n型板16前后两侧之间转动式的连接有接触辊17,接触辊17位于下方凹槽15内,接触辊17可实现对滑动框5进行导向。
45.还包括有u型板18、刮板19和第二弹簧20,请参阅图3、图9和图10所示,回型板3左侧面前后对称通过焊接连接的方式安装有u型板18,u型板18内左侧面嵌入式的滑动连接有刮板19,刮板19右侧面与玻璃门111左侧面接触,当玻璃门111移动时,刮板19可实现将玻璃门111上的杂质清除,刮板19左侧面与u型板18内侧之间均匀间隔的连接有十根第二弹簧20。
46.当滑动框5向左移动时,滑动框5带动n型板16向左移动,n型板16向左移动带动接触辊17向左移动,接触辊17向左移动在下方凹槽15内滑动,接触辊17对滑动框5进行导向,滑动框5停止向左移动时,滑动框5停止通过n型板16带动接触辊17向左移动。当滑动框5向右移动复位时,滑动框5通过n型板16带动接触辊17向右移动复位。如此,可使得滑动框5移动的过程中更加顺畅和平稳。
47.当操作人员拉动把手113带动玻璃门111向外移动时,刮板19对玻璃上的杂质进行清除,因第二弹簧20的作用,刮板19能紧密的与玻璃门111接触,当操作人员拉动把手113带动玻璃门111向内移动时,刮板19继续对玻璃门111上的杂质进行清除。如此,可避免玻璃门111上残留杂质影响后续使用。
48.最后,有必要说明的是:上述内容仅用于帮助理解本发明的技术方案,不能理解为对本发明保护范围的限制;本领域技术人员根据本发明的上述内容所做出的非本质改进和调整,均属本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。