1.本发明涉及药品物流运输领域,具体为一种基于药品物流供应链的手推式货物定位运输装置。
背景技术:
2.医院,是医疗物资的物流供应链的最后一步,通常,医疗物资在医院内运输采用电梯与推车来实现,这种人力推动小车进行运输的方式,不仅费时费力,而且灵活性差。由于小车的框架结构固定,在遇到道路不平时,会导致车体内的医疗物资发生严重的晃动。
3.现有的物流小车,如申请号为cn202110231710.5的一种医院用物流设备,其通过设置放置块和条形块,利用药品运输时将药品放置在放置腔内,再将放置盒推入车体的内腔,放置盒向车体内腔右侧移动时,履带底部的凸起与条形块顶部的控制柱转动连接,从而履带转动带动圆轮转动,配合圆轮顶部通过中心轴活动安装的固定夹转动,利用固定夹以及固定夹内表面的橡胶垫夹紧固定药品底部,防止药品在运输过程中因为碰撞晃动等原因受损,但是,其只是增加了药品与小车的连接性,由于小车的框架结构固定,在遇到道路不平时,会导致车体内的医疗物资发生严重的晃动,对于敞口容器或箱体内部的医疗物资,其很容易发生倾倒、洒落,同时,路面不平整,对于人力推车也会增加推车阻力,难以实现医疗物资的高效运输。
4.故需要一种能从源头减少装置晃动从而对药品起到保护作用的手推式货物定位运输装置。
技术实现要素:
5.本发明的目的旨在于提供一种基于药品物流供应链的手推式货物定位运输装置。
6.为实现上述目的,本发明提供如下技术方案:
7.一种基于药品物流供应链的手推式货物定位运输装置,包括车架,车架的尾端固定有用于控制操作装置的推杆,车架的底部设置有助力单元进行自主辅助助力,其特征在于,车架的顶部铰接设置有自由摆动用于装配医疗药物的的吊篮,吊篮的两侧设置有与助力单元连接感应地面状态对吊篮的摆动幅度进行阻尼控制防止吊篮运动幅度过大产生磕碰的重力阻尼单元。
8.作为本发明进一步的方案:车架包括底架、滑座与升降安装架,底架为两侧带滑轨金属框架,助力单元与推杆分别固定连接在底架的底侧与后侧,底架的上方设置有沿底架两侧滑轨滑动的滑座,滑座的上表面两侧通过伸缩杆连接有升降安装板,吊篮铰接在两侧升降安装板之间。
9.作为本发明进一步的方案:推杆呈弯折的u型结构,u型结构两侧边之间距离宽度宽于吊篮宽度。
10.作为本发明进一步的方案:助力单元包括驱动架、第一助力轮、第二助力轮、活动轮架与活动助力轮,驱动架水平固定连接在车架的底部,驱动架的中端与尾端底部分别设
置有第一助力轮与第二助力轮,驱动架的前端铰接有活动轮架,活动轮架的底部设置有活动助力轮。
11.作为本发明进一步的方案:第一助力轮、第二助力轮、活动助力轮的内部内置有小型驱动电机与转速感应器,车架内置有对应的蓄电池组对小型驱动电机进行供电,转速感应器实时检测第一助力轮、第二助力轮、活动助力轮的转速,在第一助力轮、第二助力轮、活动助力轮转动时控制蓄电池组对小型驱动电机进行供电驱动小型驱动电机低速转动。
12.作为本发明进一步的方案:驱动架与活动架的铰接处设置有扭力件,扭力件的两端分别固定在驱动架与活动架上,扭力件始终带动活动架向与驱动架保持145
°
夹角的状态运动,且扭力件对活动架的作用力小于以第二助力轮为支点克服装置自重所需要的力。
13.作为本发明进一步的方案:重力阻尼单元包括阻尼泵、导管与阻尼卡钳,阻尼泵设置在驱动架与活动架的铰接处,通过驱动架与活动架的相对角度转动驱动,阻尼泵的尾端通过导管液路连通道车架两侧设置的液压控制的阻尼卡钳上,吊篮两端的连接轴探入阻尼卡钳内,由阻尼卡钳进行转动时阻力的调控。
14.作为本发明进一步的方案:阻尼泵包括阻尼油腔与活塞块,阻尼油腔凹设在驱动架内与活动架铰接处,阻尼油腔为沿水平方向对称的两段同心的扇形油腔,以驱动架与活动架的铰接点为圆心设置,分别通过导管与阻尼卡钳内油路连通,通过与活动架周向驱动连接的活塞块驱动,进行油液的压缩与吸取,两阻尼油腔沿吸取油液方向的尾端均设置有限位结构限制最大吸取范围。
15.作为本发明进一步的方案:活塞块与阻尼油腔内液体介质之间设置有压缩件,活塞块通过压缩件间接挤压阻尼油腔内液体介质,压缩件可沿活塞块的周向转动方向进行5
°
的压缩。
16.作为本发明进一步的方案:阻尼卡钳包括卡盘、压力油腔、钳块与弹性件,卡盘呈圆盘状,吊篮连接轴探入卡盘结构内,与卡盘铰接,铰接处的外侧设置有沿垂直连接轴方向滑动的钳块,钳块与卡盘之间设置有驱动钳块与连接轴脱离的弹性件,钳块外侧的卡盘结构内凹设有压力油腔,压力油腔通过导管与阻尼泵连通。
17.有益效果
18.1.本发明车架的顶部铰接设置有自由摆动用于装配医疗药物的的吊篮,通过吊篮的摆动实现对重力方向变化的自适应,减少内部药物磕碰泼洒可能,同时吊篮的两侧设置有与助力单元连接感应地面状态对吊篮的摆动幅度进行阻尼控制防止吊篮运动幅度过大产生磕碰的重力阻尼单元,能在摆动角度过大时控制摆动的速度与角度,避免磕碰或泼洒。
19.2.本发明重力阻尼单元包括阻尼泵、导管与阻尼卡钳,阻尼泵设置在驱动架与活动架的铰接处,通过驱动架与活动架的相对角度转动驱动,阻尼泵的尾端通过导管液路连通道车架两侧设置的液压控制的阻尼卡钳上,吊篮两端的连接轴探入阻尼卡钳内,由阻尼卡钳进行转动时阻力的调控,通过阻尼泵与阻尼卡钳的设置,在活动架受地面角度变化与驱动架发生角度变化时,会带动阻尼泵运转,通过阻尼卡钳给与吊篮摆动时的阻尼力,控制吊篮的摆动速度与幅度,防止吊篮摆动速度与幅度过大带来的磕碰、药物泼洒等风险。
20.3.本发明阻尼泵包括阻尼油腔与活塞块,阻尼油腔凹设在驱动架内与活动架铰接处,阻尼油腔为沿水平方向对称的两段同心的扇形油腔,以驱动架与活动架的铰接点为圆心设置,分别通过导管与阻尼卡钳内油路连通,通过与活动架周向驱动连接的活塞块驱动,
进行油液的压缩与吸取,两阻尼油腔沿吸取油液方向的尾端均设置有限位结构限制最大吸取范围,两段油腔的设置,使得不论活动架是向上还是向下翻转都能起到对阻尼油腔内介质的压缩效果,从而体现在阻尼卡钳上,阻尼油腔尾端限位结构的设置使得活塞块压缩一侧阻尼油腔内介质时,另一侧阻尼油腔不会发生体积变化,从而保证介质的压缩效果被体现在阻尼卡钳处,保证阻尼卡钳的运转效果。
21.4.本发明活塞块与阻尼油腔内液体介质之间设置有压缩件,活塞块通过压缩件间接挤压阻尼油腔内液体介质,压缩件可沿活塞块的周向转动方向进行5
°
的压缩,通过压缩件的设置,活塞块对液体介质的压缩有了5
°
的缓冲空间,使得地面的角度变化在5
°
以内,即变化较小时,活动助力轮对地面的映射效果不会反映到阻尼卡钳处,即吊篮处于自由摆动的状态,通过摆动对地面变化带来的重力方向变化进行修正,只有在地面角度变化大于5
°
,即变化较大时,才会通过阻尼卡钳对吊兰的摆动施加阻尼力,避免因摆动速度与幅度过大带来的影响与磕碰的发生可能。
附图说明
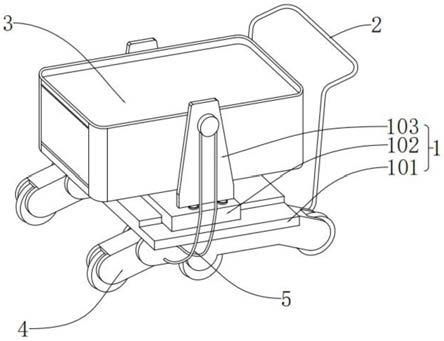
22.图1为本发明的整体结构示意图。
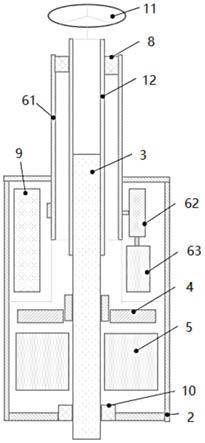
23.图2为本发明的重力阻尼单元安装示意图。
24.图3为本发明的阻尼泵结构剖视图。
25.图4为本发明的活塞块安装示意图。
26.图5为本发明的压缩件压缩示意图。
27.图6为本发明的阻尼卡钳结构剖视图。
28.图1-6中:1-车架,101-底架,102-滑座,103-升降安装架,2-推杆,3-吊篮,301-连接轴,4-助力单元,401-驱动架,402-第一助力轮,403-第二助力轮,404-活动轮架,405-扭力件,406-活动助力轮,5-重力阻尼单元,6-阻尼泵,601-阻尼油腔,602-压缩件,603-活塞块,7-导管,8-阻尼卡钳,801-卡盘,802-压力油腔,803-钳块,804-弹性件。
具体实施方式
29.下面将结合本发明说明书附图中的图1-图6,对本发明的具体技术方案进行清楚、完整地描述;
30.请参阅图1-图6,图1为本发明实施例的整体结构示意图;图2为本发明的重力阻尼单元安装示意图;图3为本发明的阻尼泵结构剖视图;图4为本发明的活塞块安装示意图;图5为本发明的压缩件压缩示意图;图6为本发明的阻尼卡钳结构剖视图。
31.本实施例提供的一种基于药品物流供应链的手推式货物定位运输装置,包括车架1,车架1的尾端固定有用于控制操作装置的推杆2,车架1的底部设置有助力单元4进行自主辅助助力,其特征在于,车架1的顶部铰接设置有自由摆动用于装配医疗药物的的吊篮3,吊篮3的两侧设置有与助力单元4连接感应地面状态对吊篮3的摆动幅度进行阻尼控制防止吊篮3运动幅度过大产生磕碰的重力阻尼单元5。
32.进一步的,如图1所示,车架1包括底架101、滑座102与升降安装架103,底架101为两侧带滑轨金属框架,助力单元4与推杆2分别固定连接在底架101的底侧与后侧,底架101的上方设置有沿底架101两侧滑轨滑动的滑座102,滑座102的上表面两侧通过伸缩杆连接
有升降安装板103,吊篮3铰接在两侧升降安装板103之间;
33.由滑座102与升降安装架103可以带动吊篮3进行前后与高度的调节,通过调节吊篮3的位置,便于对不同高度的医疗药物的搬运便利,且在卸货时可以通过调节吊篮3高度使吊篮3置于滑座102上,对吊篮3进行固定,便于药品的快速卸载,也可通过将吊篮3完全放下,实现现吊篮3摆动功能的关闭,适用于各种使用场景。
34.进一步的,推杆2呈弯折的u型结构,u型结构两侧边之间距离宽度宽于吊篮3宽度;
35.通过推杆2u形结构与宽于吊篮3的设置,使得吊篮3在受重力作用发生角度摆动时,不会与推杆2发生碰撞,及对操作者起到保护作用,也通过避免磕碰对吊篮3内的药品进行保护。
36.进一步的,如图2所示,助力单元4包括驱动架401、第一助力轮402、第二助力轮403、活动轮架404与活动助力轮406,驱动架401水平固定连接在车架1的底部,驱动架401的中端与尾端底部分别设置有第一助力轮402与第二助力轮403,驱动架401的前端铰接有活动轮架404,活动轮架404的底部设置有活动助力轮406;
37.装置整体通过驱动架401上的第一助力轮402与第二助力轮403进行支撑,而当前方地面角度条件发生变化时,又能通过前端铰接的活动架404与活动驱动轮406起到适应效果,辅助装置的俯仰角变化,便于后续第一助力轮402与第二助力轮403的平稳通过,从而提高装置前进时的稳定性,减少波动,提高对吊篮3内的药品的保护效果。
38.其中,第一助力轮402、第二助力轮403、活动助力轮406的内部内置有小型驱动电机与转速感应器,车架1内置有对应的蓄电池组对小型驱动电机进行供电,转速感应器实时检测第一助力轮402、第二助力轮403、活动助力轮406的转速,在第一助力轮402、第二助403力轮、活动助力轮406转动时控制蓄电池组对小型驱动电机进行供电驱动小型驱动电机低速转动;
39.通过转速感应器的设置,在使用者推行装置时,通过助力轮的转速对使用状态进行体现,启动小型驱动电机进行助力前行,减少使用者推行的负担,使操作者能有更多精力用于对装置的掌控,提高操作性,进而提高操作的精细度,通过人为操作精度的提高来减少推行时的颠簸,提高稳定性。
40.其中,如图4所示,驱动架401与活动架404的铰接处设置有扭力件405,扭力件405的两端分别固定在驱动架402与活动架404上,扭力件405始终带动活动架404向与驱动架402保持145
°
夹角的状态运动,且扭力件405对活动架404的作用力小于以第二助力轮403为支点克服装置自重所需要的力;
41.扭力件405的设置,使得活动助力轮406能始终与地面贴合,对地面条件进行映射,通过地面对活动助力轮406的作用力间接作用于装置,辅助装置进行俯仰角度的变化,提高流畅度,减少波动。
42.其中,如图2所示,重力阻尼单元5包括阻尼泵6、导管7与阻尼卡钳8,阻尼泵6设置在驱动架401与活动架404的铰接处,通过驱动架401与活动架404的相对角度转动驱动,阻尼泵6的尾端通过导管7液路连通道车架1两侧设置的液压控制的阻尼卡钳8上,吊篮3两端的连接轴探入阻尼卡钳8内,由阻尼卡钳8进行转动时阻力的调控;
43.通过阻尼泵6与阻尼卡钳8的设置,在活动架404受地面角度变化与驱动架401发生角度变化时,会带动阻尼泵6运转,通过阻尼卡钳8给与吊篮3摆动时的阻尼力,控制吊篮3的
摆动速度与幅度,防止吊篮3摆动速度与幅度过大带来的磕碰、药物泼洒等风险。
44.具体的,如图3所示,阻尼泵6包括阻尼油腔601与活塞块603,阻尼油腔601凹设在驱动架401内与活动架404铰接处,阻尼油腔601为沿水平方向对称的两段同心的扇形油腔,以驱动架401与活动架404的铰接点为圆心设置,分别通过导管7与阻尼卡钳8内油路连通,通过与活动架404周向驱动连接的活塞块603驱动,进行油液的压缩与吸取,两阻尼油腔601沿吸取油液方向的尾端均设置有限位结构限制最大吸取范围;
45.两段油腔的设置,使得不论活动架404是向上还是向下翻转都能起到对阻尼油腔601内介质的压缩效果,从而体现在阻尼卡钳8上,阻尼油腔601尾端限位结构的设置使得活塞块603压缩一侧阻尼油腔601内介质时,另一侧阻尼油腔601不会发生体积变化,从而保证介质的压缩效果被体现在阻尼卡钳8处,保证阻尼卡钳8的运转效果。
46.更具体的,活塞块603与阻尼油腔601内液体介质之间设置有压缩件602,活塞块603通过压缩件602间接挤压阻尼油腔601内液体介质,压缩件602可沿活塞块603的周向转动方向进行5
°
的压缩;
47.通过压缩件603的设置,活塞块603对液体介质的压缩有了5
°
的缓冲空间,使得地面的角度变化在5
°
以内,即变化较小时,活动助力406对地面的映射效果不会反映到阻尼卡钳8处,即吊篮3处于自由摆动的状态,通过摆动对地面变化带来的重力方向变化进行修正,而在地面角度变化大于5
°
,即变化较大时,会通过阻尼卡钳8对吊篮3的摆动施加阻尼力,避免因摆动速度与幅度过大带来的影响与磕碰的发生可能。
48.具体的,如图6所示,阻尼卡钳8包括卡盘801、压力油腔802、钳块803与弹性件804,卡盘801呈圆盘状,吊篮3连接轴301探入卡盘801结构内,与卡盘801铰接,铰接处的外侧设置有沿垂直连接轴方向滑动的钳块803,钳块803与卡盘801之间设置有驱动钳块803与连接轴301脱离的弹性件804,钳块803外侧的卡盘801结构内凹设有压力油腔802,压力油腔802通过导管7与阻尼泵6连通;
49.当阻尼泵6内的介质被挤压入压力油腔802后,会带动钳块803克服弹性件804作用力探出挤压吊篮3的连接轴301,根据挤入介质的多少分别实现控制吊篮3摆动时摩擦力或对吊篮3角度进行锁死的效果,进而在地面发生角度变化时,控制吊篮3的摆动速度与幅度,防止吊篮3与车架1等结构磕碰。
50.在实施本实施例所记载的技术方案时,在使用者推行装置时,助力轮的转速感应器感应助力轮转速,即对装置的使用状态进行感应,在推动后启动小型驱动电机进行助力前行,减少使用者推行的负担,当遇到地面的角度变化时,通过前端铰接的活动架404与活动驱动轮406起到适应效果,带动驱动架401与活动架404发生相对角度扭转,由扭簧405将地面的作用力反馈至车架1上,辅助装置的俯仰角变化,使装置的通过更加顺畅,而吊篮3在重力作用下与车架1发生相对角度的摆动,能修正重力方向改变对吊篮3的影响,提高稳定性,当地面的角度变化在5
°
以内,即变化较小时,活动架404对阻尼泵6的驱动效果由阻尼泵6内压缩件602吸收,不会反映到阻尼卡钳8处,即吊篮3处于自由摆动的状态,通过摆动对地面变化带来的重力方向变化进行修正,在地面角度变化大于5
°
,即变化较大时,阻尼泵6内活塞块603在压缩完压缩件602行程后挤压阻尼油腔601内介质流入阻尼卡盘8内,带动钳块803克服弹性件804作用力探出挤压吊篮3的连接轴301,根据挤入介质的多少分别实现控制吊篮301摆动时摩擦力或对吊篮3角度进行锁死的效果,进而在吊篮3发生相对角度的摆动
修正重力方向改变对吊篮3的影响时,控制吊篮3的摆动速度与幅度,防止吊篮3与车架1等结构磕碰。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。