技术特征:
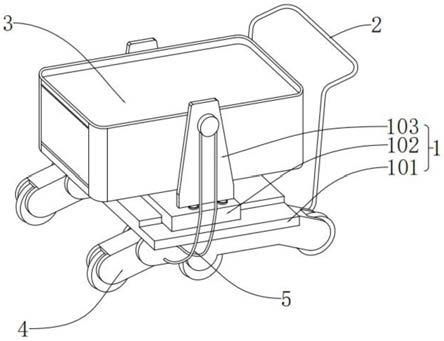
1.一种基于药品物流供应链的手推式货物定位运输装置,其特征在于,包括:车架(1),进行整体部件的有效连接;推杆(2),固定在车架(1)的尾端,进行装置的操控;助力单元(4),设置在车架(1)的底部,进行自主辅助助力,辅助装置行进;吊篮(3),铰接在车架(1)的顶部,可通过重力进行自由周向摆动,用于医疗药物的装配;重力阻尼单元(5),连接在车架(1)与助力单元(4)之间,通过助力单元(4)感应地面环境调控吊篮(3)的摆动幅度,防止吊篮(3)磕碰。2.根据权利要求1所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于,所述车架(1)包括:底架(101),为两侧带滑轨金属框架,助力单元(4)与推杆(2)分别固定连接在底架(101)的底侧与后侧;滑座(102),设置在底架(101)的上方,沿底架(101)两侧滑轨滑动;升降安装板(103),通过伸缩杆连接在滑座(102)的上表面两侧,吊篮(3)铰接在两侧升降安装板(103)之间。3.根据权利要求1所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于:所述推杆(2)呈弯折的u型结构,u型结构两侧边之间距离宽度宽于吊篮(3)宽度。4.根据权利要求1所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于,所述助力单元(4)包括:驱动架(401),水平固定连接在车架(1)的底部,驱动架(401)的中端与尾端底部分别设置有第一助力轮(402)与第二助力轮(403);活动轮架(404),铰接在驱动架(401)的前端,活动轮架(404)的底部设置有活动助力轮(406)。5.根据权利要求4所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于:所述第一助力轮(402)、第二助力轮(403)、活动助力轮(406)的内部内置有小型驱动电机与转速感应器,车架(1)内置有对应的蓄电池组对小型驱动电机进行供电,转速感应器实时检测第一助力轮(402)、第二助力轮(403)、活动助力轮(406)的转速,在第一助力轮(402)、第二助力轮(403)、活动助力轮(406)转动时控制蓄电池组对小型驱动电机进行供电驱动小型驱动电机低速转动。6.根据权利要求4所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于:所述驱动架(401)与活动架(404)的铰接处设置有扭力件(405),扭力件(405)的两端分别固定在驱动架(401)与活动架(404)上,扭力件(405)始终带动活动架(404)向与驱动架(401)保持145
°
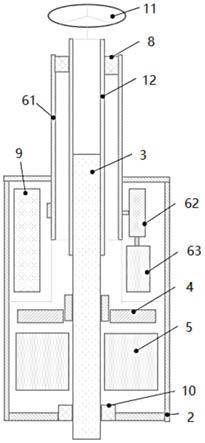
夹角的状态运动,且扭力件(405)对活动架(404)的作用力小于以第二助力轮(403)为支点克服装置自重所需要的力。7.根据权利要求1所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于,所述重力阻尼单元(5)包括:阻尼泵(6),设置在驱动架(401)与活动架(404)的铰接处,通过驱动架(401)与活动架(404)的相对角度转动驱动;阻尼卡钳(8),设置在车架(1)的两侧,通过导管(7)与阻尼泵(6)液路连通,吊篮(3)两
端的连接轴(301)探入阻尼卡钳(8)内,由阻尼卡钳(8)进行转动时阻力的调控。8.根据权利要求1所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于:所述阻尼泵(6)包括:阻尼油腔(601),凹设在驱动架(401)内与活动架(404)铰接处,阻尼油腔(601)为沿水平方向对称的两段同心的扇形油腔,以驱动架(401)与活动架(404)的铰接点为圆心设置,分别通过导管(7)与阻尼卡钳(8)内油路连通,通过与活动架(404)周向驱动连接的活塞块(603)驱动,进行油液的压缩与吸取,两阻尼油腔(601)沿吸取油液方向的尾端均设置有限位结构限制最大吸取范围。9.根据权利要求8所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于,所述阻尼泵(6)还包括有:压缩件(602),设置在活塞块(603)与阻尼油腔(601)内液体介质之间,活塞块(603)通过压缩件(602)间接挤压阻尼油腔(601)内液体介质,压缩件(602)可沿活塞块(603)的周向转动方向进行5
°
的压缩。10.根据权利要求7所述的一种基于药品物流供应链的手推式货物定位运输装置,其特征在于,所述阻尼卡钳(8)包括:卡盘(801),呈圆盘状,吊篮(3)连接轴探入卡盘(801)结构内,与卡盘(801)铰接;钳块(803),设置在连接轴(301)与卡盘(801)铰接处的外侧,沿垂直连接轴(301)方向滑动,钳块(803)与卡盘(801)之间设置有驱动钳块(803)与连接轴(301)脱离的弹性件(804);压力油腔(802),凹设在钳块(803)外侧的卡盘(801)结构内,压力油腔(801)通过导管(7)与阻尼泵(6)连通。
技术总结
本发明提供了一种基于药品物流供应链的手推式货物定位运输装置,包括车架,车架的尾端固定有用于控制操作装置的推杆,车架的底部设置有助力单元进行自主辅助助力,其特征在于,车架的顶部铰接设置有自由摆动用于装配医疗药物的的吊篮,通过吊篮的摆动实现对重力方向变化的自适应,减少内部药物磕碰泼洒可能,同时吊篮的两侧设置有与助力单元连接感应地面状态对吊篮的摆动幅度进行阻尼控制防止吊篮运动幅度过大产生磕碰的重力阻尼单元,能在摆动角度过大时控制吊篮的摆动的速度与角度,避免磕碰或泼洒,具有良好的发展前景。具有良好的发展前景。具有良好的发展前景。
技术研发人员:袁美雄 杨松 岳金鹏
受保护的技术使用者:广东鑫港湾供应链管理有限公司
技术研发日:2021.11.25
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。