1.本发明涉及控制方法和基片输送系统。
背景技术:
2.人们已知包括输送晶片等基片的输送机构的基片输送系统。
3.在专利文献1中公开了一种设置于输送机构的被处理体的位置偏移检测装置,该输送机构将多个臂部彼此可旋转地串联连接,并且使最前端的臂部保持被处理体来输送上述被处理体,上述位置偏移检测装置包括:边缘检测机构,其设置于上述多个臂部中的上述最前端的臂部以外的臂部,用于检测至少保持于上述最前端的臂部的上述被处理体的边缘;和位置偏移检测部,其基于该边缘检测机构的检测值求取上述被处理体的位置偏移。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2008-311303号公报
技术实现要素:
7.发明要解决的技术问题
8.然而,人们要求输送机构高精度地向目标位置进行输送。
9.本发明的一个方式提供能够提高输送精度的控制方法和基片输送系统。
10.用于解决技术问题的技术方案
11.本发明的一个方式的控制方法是具有保持基片的保持部且能够输送上述基片的输送机构的控制方法,其包括:检测由上述输送机构输送的上述基片的外缘,使用预先设定的与输送上述基片的路径对应的调整值来测量上述基片的中心位置的步骤;基于上述基片的中心位置与预先设定的上述保持部的基准位置的偏移量,来修正目标位置的步骤;和控制上述输送机构,以使上述保持部的基准位置成为修正后的上述目标位置的步骤。
12.发明效果
13.依照本发明的一个方式,提供能够提高输送精度的控制方法和基片输送系统。
附图说明
14.图1是表示一个实施方式的基片处理系统的结构的俯视图的一例。
15.图2是控制装置的功能框图的一例。
16.图3是说明从载置部向载置部输送基片时的输送机构的动作的一例的图。
17.图4是说明从载置部向载置部输送基片时的输送机构的动作的一例的图。
18.图5是说明从测量位置输送至目标位置时的路径的图的一例。
19.图6是表示保持基片的第3臂的形状与传感器的关系的图的一例。
20.图7是说明通过测量位置输送到目标位置时的路径的图的一例。
21.图8是说明通过测量位置输送到目标位置时的路径的图的一例。
22.图9是说明通过测量位置输送到目标位置时的路径的图的一例。
23.附图标记说明
24.w基片
25.1基片处理系统
26.2负载锁定室
27.21载置部
28.3真空输送室
29.4处理室
30.41载置部
31.5输送机构
32.53第3臂
33.53a保持部
34.6、6a、6b、61、62传感器(测量部)
35.7控制装置
36.71姿态计算部
37.72中心位置计算部
38.73存储部
39.91~93电机
40.91a~93a角度传感器。
具体实施方式
41.以下,参照附图,对用于实施本发明的方式进行说明。在各附图中,对相同的构成部分标注相同的附图标记,有时省略重复的说明。
42.<基片处理系统>
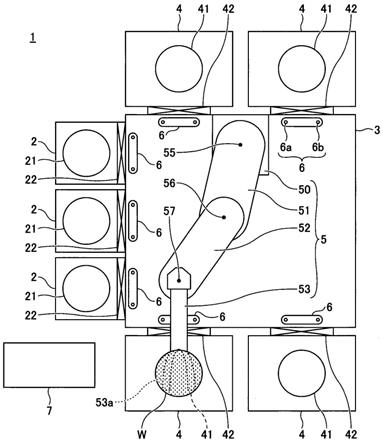
43.使用图1对一个实施方式的基片处理系统1的整体结构的一例进行说明。图1是表示一个实施方式的基片处理系统1的结构的俯视图的一例。此外,在图1中,对基片w标注点的阴影来进行图示。此外,在以下的说明中,对将基片w保持于输送机构5的第3臂53并从真空输送室3向处理室4的载置部41输送基片w的情况进行说明。
44.图1所示的基片处理系统1是群集结构(多腔室型)的系统。基片处理系统1包括负载锁定室2、真空输送室3、处理室4、输送机构5、传感器6和控制装置7。此外,输送基片w的基片输送系统包括输送机构5、传感器6和控制装置7。
45.负载锁定室2设置在真空输送室3与大气输送室(未图示)之间。负载锁定室2具有载置基片w的载置部21。负载锁定室2内构成为能够切换大气气氛和真空气氛。负载锁定室2与真空气氛的真空输送室3通过闸门(gatevalve)22的开闭而连通。负载锁定室2与大气气氛的大气输送室(未图示)通过闸门(未图示)的开闭而连通。此外,负载锁定室2内的真空气氛或大气气氛的切换由控制装置7控制。
46.真空输送室3被减压至规定的真空气氛。此外,在真空输送室3的内部设置有输送基片w的输送机构5。
47.处理室4与真空输送室3相邻地配置。处理室4具有载置基片w的载置部41。处理室4
被减压至规定的真空气氛,在其内部对载置于载置部41的基片w实施所希望的处理(例如,蚀刻处理、成膜处理、清洁处理、灰化处理等)。处理室4和真空输送室3通过闸门42的开闭而连通。此外,用于处理室4中的处理的各部分的动作由控制装置7控制。
48.输送机构5根据闸门22的开闭,在负载锁定室2与真空输送室3之间进行基片w的送入和送出。此外,输送机构5根据闸门42的开闭,在处理室4与真空输送室3之间进行基片w的送入和送出。此外,输送机构5的动作、闸门22、42的开闭由控制装置7控制。
49.输送机构5例如构成为具有基座部50、第1臂51、第2臂52和第3臂53的多关节臂。基座部50与第1臂51的长边方向的一侧由旋转轴55可旋转地连接。第1臂51的长边方向的另一侧与第2臂52的长边方向的一侧由旋转轴56可旋转地连接。第2臂52的长边方向的另一侧与第3臂53的长边方向的一侧由旋转轴57可旋转地连接。第3臂53的长边方向的另一侧具有保持(载置)基片w的保持部53a。
50.在真空输送室3的内部,与处理室4和负载锁定室2对应地设置有对由输送机构5输送的基片w进行检测的传感器(测量部)6。传感器6设置于当输送机构5将基片w从真空输送室3送入到处理室4或负载锁定室2时,或者输送机构5将基片w从处理室4或负载锁定室2送出到真空输送室3时,基片w通过的位置。
51.传感器6具有2个传感器6a、6b。传感器6a、6b例如是光电传感器,由输送机构5输送的基片w通过传感器6a、6b,由此能够检测基片w的外缘的4个点。控制装置7(后述的中心位置计算部72)基于传感器6(传感器6a、6b)对基片w的外缘的检测和此时的输送机构5的动作,检测保持于第3臂53的基片w的外缘坐标。然后,控制装置7根据检测出的4个点的外缘坐标计算基片w的中心位置。由此,传感器6和控制装置7作为测量由第3臂53保持的基片w的中心位置的测量部发挥功能。由此,控制装置7检测预先设定的第3臂53的载置基片w的基准位置(保持部53a的中心位置)与基于传感器6检测出的保持于第3臂53的基片w的中心位置的偏移(偏心量)。
52.控制装置7具有cpu(central processing unit:中央处理器)、rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)和hdd(hard disk drive:硬盘驱动器)。控制装置7不限于hdd,也可以具有ssd(solid state drive:固态硬盘)等其他存储区域。在hdd、ram等存储区域中保存有设定了工艺的流程、工艺的条件、输送条件的方案。
53.cpu按照方案来控制各处理室中的基片w的处理,控制基片w的输送。在hdd、ram中也可以存储用于执行各处理室中的基片w的处理、基片w的输送的程序。程序可以保存在存储介质中来提供,也可以通过网络从外部装置提供。
54.<输送机构>
55.下面,使用图2,对输送机构5的控制进行说明。图2是控制装置7的功能框图的一例。
56.传感器6的检测信号被输入到控制装置7。
57.输送机构5具有第1轴电机91、第2轴电机92和第3轴电机93。第1轴电机91设置在第1臂51内。第1轴电机91利用旋转轴55使第1臂51相对于基座部50旋转。第2轴电机92设置在第1臂51内。第2轴电机92利用旋转轴56使第2臂52相对于第1臂51旋转。第3轴电机93设置在第2臂52内。第3轴电机93利用旋转轴57使第3臂53相对于第2臂52旋转。
58.输送机构5具有第1轴角度传感器91a、第2轴角度传感器92a和第3轴角度传感器93a。第1轴角度传感器91a检测第1轴电机91的旋转角度。第2轴角度传感器92a检测第2轴电机92的旋转角度。第3轴角度传感器93a检测第3轴电机93的旋转角度。第1轴角度传感器91a、第2轴角度传感器92a和第3轴角度传感器93a例如能够使用编码器。第1轴角度传感器91a、第2轴角度传感器92a和第3轴角度传感器93a的检测值被输入到控制装置7。
59.控制装置7基于第1轴角度传感器91a、第2轴角度传感器92a、第3轴角度传感器93a的检测值,控制第1轴电机91、第2轴电机92、第3轴电机93,由此控制输送机构5的动作。
60.另外,控制装置7包括姿态计算部71、中心位置计算部72和存储部73。
61.姿态计算部71基于角度传感器91a~93a的检测值,计算输送机构5的姿态。基于计算出的输送机构5的姿态,计算第3臂53的载置基片w的基准位置(保持部53a的中心位置)。
62.中心位置计算部72基于传感器6(传感器6a、6b)对基片w的外缘的检测和此时的输送机构5的动作,检测保持于第3臂53的基片w的外缘坐标。然后,控制装置7根据检测出的4个点的外缘坐标计算基片w的中心位置。
63.在存储部73中存储有传感器6的校准数据(调整值)。
64.在此,传感器6的校准是指获取传感器6相对于输送机构5的位置信息的作业。具体而言,在以保持部53a的中心位置与基片w的中心位置一致的方式将基片w保持于保持部53a的状态下,使基片w通过传感器6的上方。由此,获取传感器6相对于输送机构5的位置信息作为校准数据。
65.中心位置计算部72基于传感器6(传感器6a、6b)对基片w的外缘的检测、由姿态计算部71计算出的基准位置、传感器6的校准数据(传感器位置),计算基片w的中心位置。
66.这样,控制装置7的中心位置计算部72使用传感器6测量基片w的中心位置。然后,控制装置7计算基片w的中心位置与第3臂53的基准位置(保持部53a的中心位置)的偏移量,修正目标位置。然后,控制装置7控制输送机构5,以使第3臂53的基准位置(保持部53a的中心位置)成为修正后的目标位置。由此,能够将基片w输送至目标位置。
67.下面,使用图3至图5,对输送基片w时的输送机构5的动作的一例进行说明。
68.图3是说明从载置部21向载置部41b输送基片w时的输送机构5的动作的一例的图。图3的(a)是说明从载置部21输送基片w时的输送机构5的动作的图的一例。在图3的(a)中,用实线表示从载置部21接收到基片w时的输送机构5,用虚线表示从负载锁定室2输送基片w时的输送机构5。图3的(b)是对向载置部41b输送基片w时的输送机构5的动作进行说明的图的一例。在图3的(b)中,用实线表示基片w通过传感器6的测量位置p1时的输送机构5,用虚线表示将基片w交接到载置部41b的目标位置p2时的输送机构5。输送机构5从载置部21通过路径101将基片w输送至测量位置p1,从测量位置p1通过路径102将基片w输送至目标位置p2。此外,夸张地图示了路径102中的摇晃。
69.图4是说明从载置部41a向载置部41b输送基片w时的输送机构5的动作的一例的图。图4的(a)是说明从载置部41a输送基片w时的输送机构5的动作的图的一例。在图4的(a)中,用实线表示从载置部41a接收到基片w时的输送机构5,用虚线表示从处理室4输送基片w时的输送机构5。图4的(b)是对向载置部41b输送基片w时的输送机构5的动作进行说明的图的一例。在图4的(b)中,用实线表示基片w通过传感器6的测量位置p1时的输送机构5,用虚线表示将基片w交接到载置部41b的目标位置p2时的输送机构5。输送机构5从载置部41a通
过路径201将基片w输送至测量位置p1,从测量位置p1通过路径202将基片w输送至目标位置p2。此外,夸张地图示了路径202中的摇晃。
70.图5是说明从测量位置p1输送至目标位置p2时的路径的图的一例。此外,夸张地图示了路径102、202中的摇晃。
71.控制装置7的姿态计算部71基于角度传感器91a~93a的检测值来计算第3臂53的基准位置。控制装置7控制电机91~93,以使计算出的基准位置按照从测量位置p1去往目标位置p2的路径(参照点划线)移动。
72.另外,由于因进行动作的输送机构5的旋转轴55~57在臂之间产生转矩等,实际的路径102、202与基于角度传感器91a~93a的检测值的路径(参照点划线)产生误差。此外,如图5所示,在将基片w从测量位置p1输送至目标位置p2时,从载置部21输送的情况(相对于从测量位置p1去往目标位置p2的输送方向从右侧输送的情况)下的路径102,与从载置部41a输送的情况(相对于从测量位置p1去往目标位置p2的输送方向从左侧输送的情况)下的路径202不一致而不同。这取决于从测量位置p1至目标位置p2的输送机构5的伸缩动作之前的动作(图3的路径101、图4的路径201)。因此,使用传感器6计算基片w的中心与基准位置的偏移量时的精度降低。
73.在此,在控制装置7的存储部73中,按每个输送路径保存有校准数据。即,预先对每个输送路径进行校准,按每个输送路径存储校准数据。中心位置计算部72使用与输送路径对应的校准数据,计算基片w的中心位置。由此,能够提高使用传感器6计算基片w的中心位置与基准位置的偏移量时的精度。此外,能够提高将基片w输送至目标位置时的输送精度。
74.另外,也可以对输送路径进行分组,进行输送路径的每个组的校准,按输送路径的每个组存储校准数据。中心位置计算部72使用与输送路径的组对应的校准数据,计算基片w的中心位置。也可以使用数据。由此,能够减少校准作业的次数,减少存储于存储部73的数据量。
75.图6是表示保持基片w的第3臂53的形状与传感器6的关系的图的一例。此外,在图6中,点划线表示传感器6a、6b通过的轨迹。
76.在图6的(a)所示的例子中,传感器6a和传感器6b检测基片w的外缘的4个点。由此,中心位置计算部72能够计算基片w的中心位置。
77.另一方面,在图6的(b)所示的例子中,第3臂53具有比基片w向外侧突出的突出部54。突出部54的外缘形成为以第3臂53的基准位置为中心的圆弧形状。此外,突出部54的圆弧形状的半径是已知的值,预先存储于存储部73。传感器6a检测突出部54的外缘的2个点。传感器6b检测基片w的外缘的2个点。
78.中心位置计算部72基于由传感器6a检测出的突出部54的外缘的2个点和突出部54的圆弧半径,计算突出部54的圆弧的中心,换言之第3臂53的基准位置。即,传感器6a和中心位置计算部72作为测量第3臂53的基准位置的基准位置测量部发挥功能。
79.另外,中心位置计算部72基于由传感器6b检测出的基片w的外缘的2个点和基片w的直径,计算基片w的中心位置。即,传感器6b和中心位置计算部72作为测量基片w的中心位置的中心位置测量部发挥功能。此外,基片w的直径也可以使用预先设定的尺寸。此外,也可以在事先的步骤中测量基片w的直径。
80.依照图6的(b)所示的构成,使用传感器6a检测第3臂53的基准位置(突出部54的圆
弧中心)。此外,能够将使用传感器6a检测第3臂53的基准位置的时刻和使用传感器6b检测基片w的中心位置的时刻设为接近的时刻。由此,能够使两个数据所包含的误差相等。由此,在计算基片w的中心位置与第3臂53的基准位置(保持部53a的中心位置)的偏移量时,通过作差来抵消误差,能够高精度地求取基片w的中心位置与基准位置的偏移量。由此,能够提高使用传感器6计算基片w的中心位置与基准位置的偏移量时的精度。此外,能够提高将基片w输送至目标位置时的输送精度。
81.另外,突出部54不限于图6的(b)所示的形状。如图6的(c)所示,也可以在比传感器6a通过的位置靠外侧的位置设置缺口部54a。由此,能够抑制第3臂53的宽度尺寸。
82.下面,对输送机构5的温度变化进行说明。输送机构5在内部具有作为热源的电机91~93。此外,在向高温的处理室4输送基片w时,从处理室4向输送机构5输入热量。此外,在输送在处理室4中进行了处理的高温的基片w时,从基片w向输送机构5传热。因此,第1臂51、第2臂52的连杆长度因热膨胀而变化。此外,由于与电机91~93连接的齿轮等热膨胀,旋转轴55~57的角度传递误差发生变化。因此,存在在姿态计算部71计算的基准位置与实际的基准位置之间产生误差的可能。因此,存在使用传感器6来计算基片w的中心与基准位置的偏移量时的精度降低的可能性。
83.在此,在控制装置7的存储部73中,按每个温度保存有校准数据。例如,在存储部73中保存有常温时的校准数据和高温时的校准数据。
84.在此,对常温时的校准数据和高温时的校准数据的测量方法进行说明。
85.首先,在常温时,以目标位置与基片w的中心位置一致的方式将基片w设置于载置部41。输送机构5从载置部41接收基片w并进行伸缩动作,由此保持于保持部53a的基片w通过传感器6的上方。由此,获取常温时的传感器6的校准数据。然后,将基片w送回载置部41。
86.接着,使输送机构5进行加热运转。加热方法也可以通过使电机91~93动作来进行。此外,也可以通过进行向高温的处理室4输送基片w的动作来进行输送机构5的加热。
87.输送机构5在成为了规定的温度(高温状态)的状态下,从载置部41接收基片w并进行伸缩动作,由此保持于保持部53a的基片w通过传感器6的上方。由此,获取高温时的传感器6的校准数据。然后,将基片w送回载置部41。
88.另外,也可以对于输送机构5的多个温度分别获取校准数据。
89.下面,对利用输送机构5输送基片w时的处理进行说明。在输送时,控制装置7基于输送机构5的输送时的温度和每个温度的校准数据,生成参考数据。参考数据例如使每个温度的校准数据暂时近似,生成参考数据。
90.中心位置计算部72将基于输送机构5的温度生成的参考数据作为传感器6的校准数据来计算中心位置。
91.由此,通过使用基于输送机构5的温度的参考数据,能够降低由输送机构5的热导致的臂51、52的伸长和由角度传递误差导致的影响。此外,能够提高使用传感器6计算基片w的中心位置与基准位置的偏移量时的精度。此外,能够提高将基片w输送至目标位置时的输送精度。
92.另外,使用图7和图8对提高输送精度的其他方法进行说明。
93.图7是说明通过测量位置p1输送至目标位置p2时的路径的图的一例。在此,输送机构5在通过路径101将基片w输送到测量位置p1的情况下,直接输送至目标位置p2。此时,基
片w通过路径102。
94.另一方面,输送机构5在通过路径201将基片w输送到测量位置p1的情况下,如路径211所示,将基片w向路径101的反方向输送。然后,将基片w在沿着路径101的路径212输送至测量位置p1。然后,输送机构5将基片w从测量位置p1输送至目标位置p2。这样,通过进行动作,基片w通过路径102被输送。
95.即,在相对于从测量位置p1去往目标位置p2的输送方向从右侧进行输送的情况下,直接进行输送。另一方面,在相对于从测量位置p1去往目标位置p2的输送方向从左侧进行输送的情况下,首先相对于输送方向输送至右侧,接着相对于输送方向从右侧进行输送。此外,以从右侧输送的构成为例进行了说明,但不限于此,也可以为从左侧输送的构成。
96.这样,在到达测量位置p1之前的基片w的路径201与路径101不同的情况下,通过沿着路径101的路径211、212,由此能够使从测量位置p1至目标位置p2的输送机构5的伸缩动作之前的动作(路径101、212)相同。由此,基片w在从载置部21输送到载置部41b的情况和从载置部41a输送到载置部41b的情况下,以同样的条件通过传感器6。由此,即使使用相同的校准数据,也能够提高使用传感器6计算基片w的中心位置与基准位置的偏移量时的精度。此外,能够提高将基片w输送至目标位置时的输送精度。
97.图8是说明通过测量位置p1输送至目标位置p2时的路径的图的一例。此外,如图8所示,在从路径201输送基片w时,也可以如路径213所示,在中途从路径201脱离而沿着路径101到达测量位置p1。
98.即,在相对于从测量位置p1去往目标位置p2的输送方向从右侧进行输送的情况下,直接进行输送。另一方面,在相对于从测量位置p1去往目标位置p2的输送方向从左侧进行输送的情况下,首先相对于输送方向输送至右侧,接着相对于输送方向从右侧进行输送。此外,以从右侧输送的构成为例进行了说明,但不限于此,也可以是从左侧输送的构成。
99.由此,与图7所示的情况同样地,能够使从测量位置p1至目标位置p2的输送机构5的伸缩动作之前的动作(路径101、213)相同。由此,基片w在从载置部21输送到载置部41b的情况和从载置部41a输送到载置部41b的情况下,以同样的条件通过传感器6。由此,即使使用相同的校准数据,也能够提高使用传感器6计算基片w的中心位置与基准位置的偏移量时的精度。此外,能够提高将基片w输送至目标位置时的输送精度。
100.另外,图7和图8所示的输送机构5的动作的输送时间增加。因此,控制装置7也可以构成为包括输送精度优先的模式和输送时间优先的模式,能够切换动作模式。在输送精度优先的模式中,从相同的方向输送到测量位置p1(参照路径101、212、213)。在输送时间优先的模式中,在各个路径输送到测量位置p1(参照路径101、201)。由此,能够选择使输送精度和输送速度中的哪一者优先。
101.另外,在图7和图8所示的例子中,以在从一个载置部(21、41a)向另一个载置部(41b)输送基片w时变更输送路径的情况为例进行了说明,但不限于此。在向载置部41b输送基片w时,也可以经由规定的载置部21。例如,也可以构成为,在从载置部41a向载置部41b输送基片w时,输送机构5首先从载置部41a向载置部21输送基片w,接着从载置部21向载置部41b输送基片w。此外,在从载置部21向载置部41b输送基片w时,输送机构5直接从载置部21向载置部41b输送基片w。
102.由此,能够使从测量位置p1至目标位置p2的输送机构5的伸缩动作之前的动作(路
径101)相同。此外,即使使用相同的校准数据,也能够提高使用传感器6计算基片w的中心位置与基准位置的偏移量时的精度。此外,能够提高将基片w输送至目标位置时的输送精度。
103.图9是说明通过测量位置p1输送至目标位置p2时的路径的图的一例。传感器6具有传感器61和传感器62。
104.在此,测量位置p1是利用基片w遮挡传感器61的情况来检测基片w的外缘的位置(传感器61的斜光位置)。在该位置,路径101与路径201一致。
105.位置p3是利用基片w通过了传感器61的情况来检测基片w的外缘的位置(传感器61的投光位置)。在该位置,路径102与路径202的位置错开。因此,在使用相同的参考数据的情况下,由于输送路径不同,基片w的中心位置与基准位置的偏移量的测量精度降低。
106.位置p4是从位置p3去往目标位置p2的中途的位置,是利用基片w通过了传感器62的情况来检测基片w的外缘的位置(传感器62的投光位置)。在此,路径102和路径202在位置p4之前汇合,去往目标位置p2。
107.在此,传感器6在不取决于输送机构5的动作(路径)的位置检测基片w的外缘。即,在图9所示的例子中,传感器6基于传感器61的斜光位置和传感器62的投光位置来计算基片w的中心位置。由此,从测量位置p1至目标位置p2的输送机构5的伸缩动作之前的动作(路径101、201)变得不同,由此,即使从测量位置p1至目标位置p2的动作(路径102、202)不同,也能够在不取决于动作的位置检测基片w的外缘。由此,即使使用相同的校准数据,也能够提高使用传感器6计算基片w的中心位置与基准位置的偏移量时的精度。此外,能够提高将基片w输送至目标位置时的输送精度。
108.以上,对基片处理系统1和基片输送系统的实施方式等进行了说明,但本发明并不限定于上述实施方式等,在权利要求书所记载的本发明的主旨的范围内,能够进行各种变形、改良。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。