1.本发明涉及一种用于聚焦用于借助激光束对对象进行线照明的对象透镜(objektivlinse)的聚焦设备,所述聚焦设备具有基体,用于容纳所述对象透镜的透镜支架以能够移动的方式容纳在所述基体上,所述聚焦设备具有至少一个直线引导装置,所述直线引导装置用于在移动时引导透镜支架,所述聚焦设备具有至少一个路径测量系统(wegmesssystem)。
2.此外,本发明涉及一种用于聚焦用于借助激光束对对象进行线照明的对象透镜的方法。
背景技术:
3.由wo 2018/019374 a1已知一种激光系统,所述激光系统用于在工作平面中提供激光线,以便借助激光束对对象进行线照明。在此,激光线在第一方向上在显著的长度上延伸,并且在与第一方向垂直的第二方向上仅在非常小的延展尺度上延伸。激光系统具有用于提供激光束的激光源以及聚焦装置,以便将长延伸(langgestreckt)的激光束聚焦到激光线上。
4.由de 10 2018 200 078 a1已知用于借助激光束对对象进行线照明的另一系统。在此,也设置有用于借助激光束对对象进行线照明的至少一个对象透镜,该至少一个对象透镜与聚焦设备耦合。
5.这种激光系统的示例性应用包括例如在tft显示器中的、沉积在玻璃衬底上的硅氧化层的再结晶,例如太阳能电池的激光辅助式掺杂,以及在制造微电子设备的情况下的激光剥离方法。
6.为了调整线焦点系统(linienfokussystem)上的对象透镜,通常使用两个直线引导装置结合具有长度路径测量系统的中央主轴驱动器。路径测量系统通常能够分辨几纳米,因此,能够非常准确地确定对象透镜的中心的位置。因此,该位置是非常重要的,因为这种线焦点系统的工作范围是强烈受限的并且景深在例如大约250μm的范围中。线的焦点应该尽可能地平行于待加工的对象的照明平面,以便在整个宽度上实现相同的工艺结果,以及以便获得最大的景深范围。
7.然而,由于直线引导装置从来不是绝对笔直的,因此,在移动镜头(objektivs)时,光学器件在与理想线偏离的轨道上行驶。在目前常见的、激光束的高达1.5m的线长度的情况下,这导致:光学器件的端部与待加工的对象的间距可能和中心与待加工的对象的间距不同,即长延伸的激光束的焦点线与对象成角度地伸展。即,焦点线不平行于对象伸展,由此,所述加工在对象宽度上变得不均匀。
技术实现要素:
8.在此背景下,本发明所基于的任务在于,提出一种用于聚焦用于借助激光束对对象进行线照明的对象透镜的改善的聚焦设备和方法,由此减少上述问题。尤其是,应能够实
现激光束的焦点线与待加工的对象之间的改善的平行性。
9.根据本发明,在根据开头提到的类型的聚焦设备的情况下,该任务通过下述方式来解决:设置有至少两个驱动器,所述驱动器用于移动(verfahren)透镜支架。
10.此外,本发明的任务通过一种用于聚焦用于借助激光束对对象进行线照明的对象透镜的方法,其中,借助至少两个驱动器以及至少一个直线引导装置移动基体上的用于容纳所述对象透镜的透镜支架,以便进行聚焦,其中,使用至少一个路径测量系统以监控移动路径。
11.通过这种方式,完全解决本发明的任务。
12.由于根据本发明设置有用于移动透镜支架的至少两个驱动器,因此,当沿着聚焦路径识别到与直线性的偏差时,为了进行校正,能够通过配属的控制装置小程度地移动两个驱动器中的一个驱动器。这同样能够通过不同步地移动两个驱动器来实现。
13.因此,能够补偿直线性误差
14.根据本发明的另一构型,设置有至少两个、优选三个直线引导装置。
15.由此能够实现改善的直线性。
16.根据本发明的另一构型,设置有两个外部的直线引导装置,沿对象透镜的延伸方向看,所述外部的直线引导装置成与对象透镜的端部的间距为最高25%、优选最高15%。
17.通过这种方式,使直线引导装置尽可能地靠近镜头端部,使得与直线性的偏差被最小化,所述偏差能够由于焦点线的大的长度而导致更大的角度偏差。
18.根据本发明的另一构型,设置有控制装置,所述控制装置与驱动器耦合并且与至少一个路径测量系统耦合。
19.优选地,设置有至少两个路径测量系统,所述路径测量系统进一步优选地如此布置:该路径测量系统与对象透镜(沿对象透镜的延伸方向看)、与对象透镜的端部具有尽可能小的间距。
20.因此,能够可靠地以高精度检测偏差,所述偏差在对象透镜的端部上能够是最大的。
21.所述控制装置原则上构造用于同步地移动两个驱动器,以便进行聚焦。
22.但是,如果在移动时识别到直线性误差,则所述控制装置为了校正直线性误差能够小程度地移动两个驱动器中的一个驱动器。能够在一定程度上地接受在此出现的张力。
23.同样的结果能够通过不同步地移动两个驱动器来实现。
24.可以理解,本发明不仅能够按相应说明的组合使用,还能够按其他的组合来使用或者单独使用,而不偏离发明的范畴。
附图说明
25.本发明的其他特征和优点参照附图从对优选的实施例的以下描述中得出。附图示出:
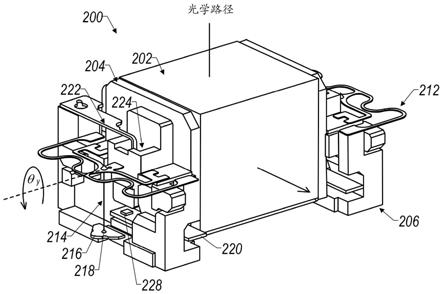
26.图1示出根据本发明的聚焦设备的透视图;
27.图2示出从后侧来看的、根据图1的聚焦设备,以及
28.图3示出从对象透镜的下侧来看的、根据图1的聚焦设备。
具体实施方式
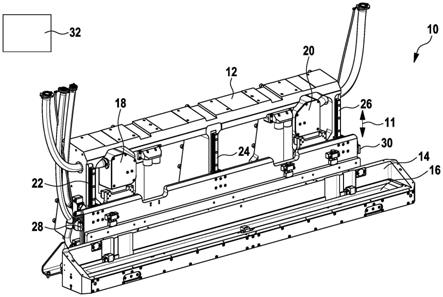
29.在图1中以透视的方式示出根据本发明的用于聚焦用于激光束的线照明的对象透镜的聚焦设备,该聚焦设备整体上用编号10标示。
30.在此,这例如涉及用于在根据由wo 2018/019374 a1已知的类型的激光系统中使用的聚焦设备。这个聚焦设备完全通过引用而包括在内。
31.根据wo 2018/019374 a1,激光系统构造用于在工作平面中提供线形激光束,以便对对象进行线照明。激光线在第一方向上在显著的长度上延伸,该显著的长度在实践中目前高达大约1.5m,而在与此垂直的方向上的延展尺度非常小。在此,通过适合的光学器件和均匀化与聚焦单元对激光束进行转化,以便形成长延伸的激光线。这种线焦点系统的景深仅为非常小的值,例如大约
±
250μm。由于激光线的、目前能够高达大约1.5m的、显著的长度,在聚焦设备移动时,即使非常小的直线性偏差也会造成聚焦线与相对于待加工的对象所在的工作平面的期望的平行性的明显的偏差。
32.在根据de 10 2018 200 078 a1的、用于产生聚焦在工作平面中以对对象进行线照明的激光线的激光系统的一种替代的实施方案中也出现与在聚焦设备与直线性存在偏差时相同的问题。
33.在此,本发明提出补救措施。根据图1的根据本发明的聚焦设备10具有基体12,带有对象透镜16的透镜支架14能够在该基体上沿双箭头11的方向移动,以便进行聚焦。
34.为此,借助三个直线引导装置22、24、26在基体12上引导透镜支架14。为了进行移动设置有两个驱动器18、20。为了检测移动路径设置有两个路径测量系统28、30。
35.两个驱动器18、20中的每个驱动器都包括滚珠丝杠19或21(图2)。
36.为了将与直线性的偏差保持得尽可能小,沿对象透镜16的延伸方向看,两个外部的直线引导装置22、26以与对象透镜16的两个端部仅具有非常小的间距d的方式布置(参见图3)。
37.沿对象透镜16的延伸方向看,两个路径测量系统28、30同样以与对象透镜16的端部仅具有非常小的间距e的方式布置(参见图3)。
38.沿对象透镜16的延伸方向看,外部的直线引导装置22、26与对象透镜16的端部之间的间距d小于对象透镜16的总长度的15%。沿对象透镜16的延伸方向看,路径测量系统28、30与对象透镜16的端部之间的间距e小于对象透镜16的长度的10%。
39.通过直线引导装置22、26与对象透镜16的端部之间的这种小的间距,将对象透镜16聚焦时的偏差保持得尽可能小。通过路径测量系统28、30与对象透镜16的端部之间的小的间距,所述检测能够尽可能准确。
40.驱动器18、20以及路径测量系统28、30与控制装置耦合,该控制装置仅借助编号32在图1中示出。可以理解,控制装置32通常是整个激光系统的中央控制装置的一部分,该激光系统的其余部件在此未示出。
41.为了进行聚焦,两个驱动器18、20首先彼此同步地被控制装置32操纵。这种驱动原理也被称为所谓的龙门式驱动(gantry-antrieb)。
42.如果在聚焦时确定与直线性的偏差,则与驱动器18、20以及路径测量系统28、30耦合的控制装置32能够要么实现两个驱动器26、28的不同步的移动,要么仅小程度地实现两个驱动器18、20中的一个驱动器的移动,以便在很大程度上完全地补偿直线性误差。由于小
的校正路径,能够接受在此出现的张力。
43.另外,能够以调节或者控制的方式补偿由于不同的热性能(热-冷性能)决定的焦点漂移。这能够通过对与被照明的对象的工作平面平行的线焦点进行根据本发明在很大程度上平行的跟踪实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。