1.本发明涉及工作流水线用输送系统以及具备该工作流水线用输送系统的机器人系统。
背景技术:
2.以往,例如在汽车的车身组装线等工作流水线中,沿着工作流水线设置有多个工作台,工件在各工作台之间被输送装置输送。在各工作台中,对输送来的工件进行基于机器人的熔接、涂装等各种作业。
3.例如在专利文献1中,公开了具备一对往复杆的工件输送装置。该往复杆通过将多个输送棒在输送方向连结而构成,并遍及多个工作台进行配置。这样的往复杆支承并输送多个工件。而且,被往复杆输送来的工件构成为通过利用升降器使该往复杆整体地上升而被上升配置。另外,以往,也存在在往复杆设置升降机构,并通过该升降机构与定位器的组合来进行将工件定位于规定位置的处理的情况。
4.专利文献1:日本特开平3-66531号公报
5.然而,通过利用升降器使往复杆整体地上升来使工件进行上升配置的结构存在大型化及复杂化的课题。另外,通过升降机构与定位器的组合来将工件定位于规定位置的结构由于需要升降机构以及定位器双方用的信号线以及空气软管等,所以存在简化结构的余地。
技术实现要素:
6.因此,本发明的目的在于,提供一种结构比以往简化而不是大型化的工作流水线用输送系统以及具备该工作流水线用输送系统的机器人系统。
7.本发明的工作流水线用输送系统具备:一对往复杆,它们对工件进行支承,并在输送方向延伸;和多个定位器,它们具有构成为能够在上下方向移动的多个定位销,上述多个定位器构成为在使上述多个定位销上升并通过该多个定位销从上述一对往复杆接受被上述一对往复杆输送至规定位置的上述工件后,进一步使上述多个定位销上升到规定高度而对上述工件进行上升配置。
8.根据本发明,被一对往复杆输送来的工件被多个定位器配置为上升到作业位置。通过这样的结构,不需要通过升降器使往复杆上升,因此结构不会大型化。另外,定位器具备从一对往复杆接受工件并使其上升到作业位置的功能,由此不需要在一对往复杆各自分别设置升降机构。由此,不需要升降机构用的信号线等。由此,结构变得简单。据此,能够实现结构比以往简化而不是大型化的工作流水线用输送系统。
9.在上述发明中,也可以是,上述多个定位器通过使上述多个定位销向下方移动而使上述工件下降,由此将上述工件交接给上述一对往复杆。
10.根据上述结构,能够将作业后的工件从多个定位器容易地交接给一对往复杆。
11.在上述发明中,也可以是,上述一对往复杆各自具有多个支承部,上述多个支承部在上下方向延伸并对上述工件进行支承,并且上述多个支承部相对于上述往复杆为固定式,上述多个定位器使上述多个定位销的上端退避到比被上述多个支承部支承的状态下的上述工件的最下部低的位置,直到上述工件被上述一对往复杆输送至上述规定位置。此外,上述固定式是各支承部不构成为能够进行上升动作等移动动作,而设置为相对于往复杆被固定的意思。
12.根据上述结构,能够在输送工件时避免该工件与定位销的干涉。另外,多个支承部构成为相对于往复杆为固定式,从而与在往复杆设置升降机构的现有结构不同,不需要该升降机构的驱动装置(例如马达、缸等)。由此,不需要升降机构用的信号线等。因此,能够简单地构成工作流水线用输送系统。
13.在上述发明中,也可以是,上述多个定位器在俯视时配置于上述一对往复杆之间。
14.根据上述结构,与将多个定位器配置于一对往复杆的外侧的情况相比,能够实现工作流水线用输送系统的省空间化。
15.在上述发明中,也可以是,上述驱动装置包括双马达。
16.根据上述结构,能够维持驱动往复杆的驱动力或者抑制该驱动力的下降,并使驱动装置小型化。由此,容易将驱动装置配置于一对往复杆之间。
17.在上述发明中,也可以是,上述一对往复杆包括多对上述往复杆,上述工件以该工件为单位被上述一对往复杆输送。
18.根据上述结构,能够以各个工件为单位来输送该工件。根据这样的结构,即使在需要将大小相互不同的工件输送至规定位置的情况下,也能够容易地进行每个工件的配置。
19.在上述发明中,也可以是,工作流水线用输送系统还具备:齿条,其在上述输送方向延伸,并设置于上述一对往复杆各自的下部;小齿轮,其与各上述齿条啮合;以及驱动装置,其与上述小齿轮连结,并对该小齿轮进行旋转驱动。
20.根据上述结构,在往复杆的下部配置齿条,由此粉尘难以积存于该齿条。
21.在上述发明中,也可以是,上述工件是汽车的车身或者构成该车身的一部分的部件。
22.根据上述结构,通过在作为工件而输送汽车的车身等的输送线应用本发明,能够实现结构比以往简化而不是大型化的汽车组装用的工作流水线用输送系统。
23.本发明的机器人系统具备:上述的工作流水线用输送系统;多个作业机器人,它们在上述输送方向并列设置;以及机器人用控制装置,其对上述多个作业机器人的动作进行控制,在上述工作流水线用输送系统设置有对上述往复杆的动作进行控制的第一控制装置、和对上述多个定位器的动作进行控制的第二控制装置,上述机器人用控制装置、上述第一控制装置以及上述第二控制装置中的至少任意两个使上述多个作业机器人、上述往复杆以及上述多个定位器中的至少任意两个协同动作。
24.根据本发明,具备上述的工作流水线用输送系统,因此结构比以往简化而不是大型化。另外,通过上述协同动作能够对工件精确地进行作业。
25.本发明的机器人系统具备:上述的工作流水线用输送系统;以及多个作业机器人,它们在上述输送方向并列设置,并具有至少1个关节轴、和对该关节轴进行旋转驱动的至少1个第一伺服马达,上述驱动装置具有至少1个第一旋转轴、和对该第一旋转轴进行旋转驱
动的至少1个第二伺服马达,上述定位器具有至少1个第二旋转轴、和对该第二旋转轴进行旋转驱动的至少1个第三伺服马达,上述机器人系统还具备机器人用控制装置,上述机器人用控制装置对上述作业机器人的动作进行伺服控制,并且将上述驱动装置的上述第一旋转轴和上述定位器的上述第二旋转轴作为外部轴,来对上述驱动装置的动作和上述定位器的动作进行伺服控制。
26.根据本发明,具备上述的工作流水线用输送系统,因此结构比以往简化而不是大型化。另外,第一旋转轴和第二旋转轴作为外部轴被机器人用控制装置控制,因此驱动装置中的错误代码、定位器中的错误代码与作业机器人的错误代码相同,因此维护以及故障排除变得容易。
27.根据本发明,能够提供结构比以往简化而不是大型化的工作流水线用输送系统以及具备该工作流水线用输送系统的机器人系统。
附图说明
28.图1是表示本发明的一个实施方式所涉及的工作流水线用输送系统的立体图。
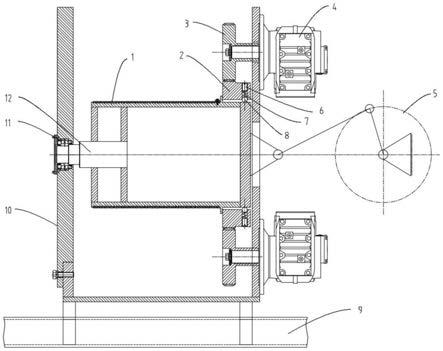
29.图2是表示图1的工作流水线用输送系统的驱动系统的立体图。
30.图3是简要地表示具备图1的工作流水线用输送系统的机器人系统的构成的框图。
31.图4是表示工件被从往复杆向定位器交接前的状态的、从输送方向下游侧观察到的工作流水线用输送系统的简要侧视图。
32.图5是表示工件被从往复杆向定位器交接后的状态的、从输送方向下游侧观察到的工作流水线用输送系统的简要侧视图。
33.图6是表示工件被从定位器向往复杆交接后的状态的、从输送方向下游侧观察到的工作流水线用输送系统的简要侧视图。
34.图7是表示图3的机器人系统的变形例的框图。
具体实施方式
35.以下,参照附图,对本发明的一个实施方式所涉及的工作流水线用输送系统以及机器人系统进行说明。以下说明的工作流水线用输送系统以及机器人系统只不过是本发明的一个实施方式。因此,本发明不限定于以下的实施方式,能够在不脱离本发明的主旨的范围内进行追加、删除以及变更。
36.本实施方式的工作流水线用输送系统100作为工作流水线例如适用于将汽车的车身组装的车身组装线。以下,将在车身组装线中被输送的车身的主体或者构成其一部分的车架等部件称为工件w。
37.如图1所示,工作流水线用输送系统100具备:多个基座1;多对往复杆2、2,它们构成为能够在输送方向d1移动;以及多个驱动装置6,它们与各一对往复杆2、2对应地设置。通过该驱动装置6的驱动,使对应的一对往复杆2、2在输送方向d1单独地移动。
38.多个基座1由在输送方向d1延伸的板部件形成,并沿着该输送方向d1并列设置。在输送方向d1相邻的基座1彼此被多个连结部件1a(图2)连结。
39.在工作流水线用输送系统100设置有对工件w进行规定的作业(例如熔接作业等)的多个工作台(作业区域)s。各个工作台s沿着输送方向d1设置。工件w被依次输送至在输送
方向d1并列设置的每个工作台s。在各工作台s中,在与输送方向d1正交的方向(以下,称为正交方向)d2的隔着基座1的两侧分别设置有作业机器人70(图3至图6)。作业机器人70例如是多关节型机器人。各工件w在被一对往复杆2输送到各工作台s的规定位置后,被实施基于作业机器人70的作业。
40.一对往复杆2、2形成为大致板状。一对往复杆2、2在输送方向d1延伸。一对往复杆2、2中的一方的往复杆2与另一方的往复杆2在正交方向d2相互隔开规定间隔地进行配置。而且,具有这种结构的一对往复杆2、2在输送方向d1设置有多个。在该情况下,在输送方向d1相邻的一方的往复杆2与另一方的往复杆2相互分离地进行配置。即,在输送方向d1相邻的一方的往复杆2与另一方的往复杆2以非接触的方式进行配置。
41.在一对往复杆2、2各自设置有对工件w进行支承的棒状且固定式的多个支承部3。详细而言,支承部3设置为在上下方向延伸,并设置于往复杆2的顶面上。在图1的例子中,在一方的往复杆2设置有2个支承部3,在另一方的往复杆2设置有2个支承部3。在一方的往复杆2设置的各支承部3之间的间隔与在另一方的往复杆2设置的各支承部3之间的间隔例如能够形成相同,但也可以因工件w的种类而不同。
42.在各工作台s设置有多个定位器4。多个定位器4在俯视时配置于一对往复杆2、2之间。在图1的例子中,针对每个工作台s设置有4个定位器4。各个定位器4相互协作而进行工件w的定位。定位器4具有至少1个第二旋转轴41(图3)以及对该第二旋转轴41进行旋转驱动的至少1个第三伺服马达40(图3)。定位器4的动作由第二控制装置112(图3)进行伺服控制。定位器4具有插通于在工件w的底部形成的孔(省略图示)的定位销5。此外,供定位销5插通的上述的孔也可以不设置于工件w的底部,例如也可以设置于工件w的侧面。在该情况下,定位销5也可以配置为朝向水平方向。
43.若将上述4个定位器4设为4a、4b、4c、4d,则定位器4a与定位器4b配置于一对往复杆2、2之间并且相互对置地配置。另外,定位器4c与定位器4d在比定位器4a、4b靠输送方向d1的下游侧配置于一对往复杆2、2之间并且相互对置地配置。此外,定位器4a、4b、4c、4d具有相互相同的结构,因此在以下总称定位器4a、4b、4c、4d的情况以及对定位器4a、4b、4c、4d中的任意选择出的定位器进行说明的情况下,存在省略附图标记的英文而记载为定位器4的情况。
44.定位器4以使定位销5在相互正交的三个轴向移动的方式进行控制。即,定位销5构成为在三个轴向自如移动。详细而言,如图4所示,定位器4以使定位销5在相互正交的三个轴向自如移动的方式具备第一移动模块41、第二移动模块42以及第三移动模块43。第一移动模块41、第二移动模块42以及第三移动模块43分别具有上述的第二旋转轴41以及第三伺服马达40,并构成为从下向上依次被连结。
45.详细而言,第一移动模块41使定位销5在与工件w的输送方向d1平行的第一水平方向移动。第一移动模块41具有在第一水平方向延伸的第一基部部件和相对于第一基部部件在第一水平方向被滑动驱动的第一滑动部件。第一移动模块41的第一基部部件固定在基座1上。
46.另外,第二移动模块42使定位销5在与正交方向d2平行的第二水平方向移动。第二移动模块42具有在第二水平方向延伸的第二基部部件和相对于第二基部部件在第二水平方向被滑动驱动的第二滑动部件。第二移动模块42的第二基部部件固定在第一移动模块41
的第一滑动部件上。
47.另外,第三移动模块43使定位销5在上下方向移动。第三移动模块43具有在上下方向延伸的第三基部部件和相对于第三基部部件在上下方向被滑动驱动的第三滑动部件。第三移动模块43的第三基部部件立设在第二移动模块42的第二滑动部件上。在第三滑动部件以上下方向朝上的方式设置有定位销5。此外,在本实施方式中,定位器4从下向上依次配置有第一移动模块41、第二移动模块42以及第三移动模块43,但第一移动模块41、第二移动模块42以及第三移动模块43的配置不被特别限定。
48.上述的第一滑动部件、第二滑动部件以及第三滑动部件由第三伺服马达40滑动驱动。由此,能够任意地变更定位销5的位置。
49.定位器4预先以不与被输送的工件w接触的方式使定位销5的上端退避到比被多个支承部3支承的状态下的工件w的最下部低的位置,直到工件w被一对往复杆2、2输送至规定的工作台s。一对往复杆2、2将工件w在输送方向d1输送到定位销5与被该定位销5插通的工件w的孔(省略图示)在铅垂方向一致的位置。
50.若位于某个工作台s的工件w被一对往复杆2、2输送到下一个工作台s的规定位置,则定位器4为了接受被输送来的工件w,而使定位销5上升到比支承部3的上端高的位置并插通于工件w的孔。由此,利用定位销5从一对往复杆2、2的各支承部3接受工件w,通过使定位销5进一步上升,该工件w成为在规定高度被该定位销5支承的状态。这样,在工件w被定位销5支承的状态下,进行基于作业机器人70的作业。此外,输送了工件w的上述一对往复杆2、2在作业机器人70进行作业的期间,以比输送工件w时的速度快的速度返回之前的工作台s(即,上述的某个工作台s)并待机。
51.若作业机器人70的作业结束,则定位器4使定位销5以该定位销5的前端配置于比被多个支承部3支承的状态下的工件w的最下部低的位置的方式下降而从工件w的孔拔出。由此,工件w被返回该工作台s并待机的另一对往复杆2、2(即,与上述一对往复杆2、2在输送方向d1下游侧相邻的另一对往复杆2、2)的各支承部3支承。之后,工件w被一对往复杆2、2向输送方向d1下游侧的下一个工作台s输送。通过重复以上那样的输送,而构成为对工件w依次实施各工作台s中的作业。
52.驱动装置6作为用于使一对往复杆2、2朝向规定的工作台s移动的驱动源发挥功能。如图2所示,驱动装置6与一对往复杆2、2对应地设置在基座1上。在本实施方式中,驱动装置6在俯视时配置于一对往复杆2、2之间。即,驱动装置6不设置于一对往复杆2、2的外侧。
53.接下来,对驱动装置6的结构详细地进行说明。驱动装置6具备:构成双马达的第二伺服马达7a及第二伺服马达7b、收纳齿轮的齿轮箱8、第一旋转轴9、将该第一旋转轴9支承为能够旋转的一对支承部件10、10、以及设置于第一旋转轴9的两端的一对小齿轮11、11。
54.第二伺服马达7a以及第二伺服马达7b由后述的第一控制装置110(图3)进行伺服控制。该第二伺服马达7a以及第二伺服马达7b的驱动力经由齿轮箱8的齿轮传递至第一旋转轴9。通过像这样将驱动力传递至第一旋转轴9,从而设置于该第一旋转轴9的两端的小齿轮11、11绕其轴线旋转。此外,使用后述的图3对第一控制装置110以及其他控制装置的详细后述。
55.在一对往复杆2各自的下部设置有在输送方向d1延伸并且与小齿轮11啮合的齿条12。齿条12设置为其齿向下方突出。此外,齿条12的齿从该齿条12的前端到后端遍及齿条12
的大致全长进行设置。
56.齿条12具有从往复杆2的输送方向d1的前端(输送方向d1下游侧的端部)以及后端(输送方向d1上游侧的端部)突出的长度。即,齿条12的长度比往复杆2的长度长。传递至各小齿轮11的旋转力传递至各齿条12,由此被转换成使往复杆2沿着输送方向d1移动的直行力。通过这样的结构,各往复杆2沿着输送方向d1移动。而且,由于齿条12的长度比往复杆2长,所以相比齿条12的长度与往复杆2的长度相同的情况(齿条12的输送方向d1的两端面与往复杆2的两端面成为共面的情况),能够增大往复杆2的输送方向d1的移动最大距离。
57.支承部件10由板状部件形成,通过基部部分以及立设部分而形成为l字型。在支承部件10以将上述基部部分与立设部分连接的方式设置有用于加强其强度的加强部件10a。另外,在支承部件10的立设部分设置有将第一旋转轴9支承为能够旋转的轴承10b。由此,第一旋转轴9在被轴承10b支承为能够旋转的状态下能够绕其轴进行旋转。
58.这里,在工作流水线用输送系统100设置有从正交方向d2的两侧夹持各个往复杆2的多个夹持部件15。各个夹持部件15在基座1上沿着输送方向d1分别以规定间隔进行配置。
59.夹持部件15具备:固定在基座1上的基部15a、从基部15a向上方延伸并且设置于往复杆2的两侧的一对保持部15b、15b、被各保持部15b保持并呈大致u字型的一对支承部15c、设置于各支承部15c且与往复杆2接触并旋转的大致圆柱状的多个(在本例中为2个)第一凸轮从动件15d、以及与往复杆2接触并旋转的大致圆柱状的多个(在本例中为2个)第二凸轮从动件15e。
60.各支承部15c包括上下设置并将各第一凸轮从动件15d支承为能够旋转的一对凸轮从动件支承部和将该一对凸轮从动件支承部连结的连结部。这里,如图2所示,往复杆2在其上部以及下部具有沿着输送方向d1延伸并且向正交方向d2的两侧突出的突出部2a。在这样的结构中,通过在正交方向d2的一侧的支承部15c的上下设置的第一凸轮从动件15d(第一凸轮从动件15d的周面)与在正交方向d2的另一侧的支承部15c的上下设置的第一凸轮从动件15d(第一凸轮从动件15d的周面)来夹持在往复杆2的上下设置的突出部2a。即,在一侧的支承部15c的上侧设置的第一凸轮从动件15d与在另一侧的支承部15c的上侧设置的第一凸轮从动件15d配置为分离,在一侧的支承部15c的下侧设置的第一凸轮从动件15d与在另一侧的支承部15c的下侧设置的第一凸轮从动件15d配置为分离。各往复杆2在沿着输送方向d1被输送时,通过一侧的支承部15c的上侧的第一凸轮从动件15d与另一侧的支承部15c的上侧的第一凸轮从动件15d之间,并且通过一侧的支承部15c的下侧的第一凸轮从动件15d与另一侧的支承部15c的下侧的第一凸轮从动件15d之间。此外,第二凸轮从动件15e设置为从正交方向d2的两侧夹持往复杆2中的不是突出部2a的部分(不突出的部分)。
61.接下来,对具备本实施方式的工作流水线用输送系统100的机器人系统200进行说明。如图3所示,在机器人系统200设置有多个作业机器人70以及对多个作业机器人70的动作进行伺服控制并且具有通信接口if的机器人用控制装置111。作业机器人70具有至少1个关节轴72以及对该关节轴72进行旋转驱动的至少1个第一伺服马达71。在这样的结构中,机器人用控制装置111、第一控制装置110以及第二控制装置112使多个作业机器人70、多对往复杆2、2以及多个定位器4协同动作。详细而言,机器人用控制装置111、第一控制装置110以及第二控制装置112分别具有通信接口if,例如通过使用依据以太网(注册商标)规格的lan线缆等经由接口if相互进行通信而实现上述协同动作。上述协同动作是使各控制装置应该
控制的控制对象物的位置信息等的信息共享而使该控制对象物协同动作的意思。此外,机器人用控制装置111、第一控制装置110以及第二控制装置112中的至少任意两个也可以使多个作业机器人70、多对往复杆2、2以及多个定位器4中的至少任意两个协同动作。另外,机器人用控制装置111、第一控制装置110以及第二控制装置112不限于以太网(注册商标),也可以使用其他线缆来进行相互通信,或者也可以进行基于无线的相互通信。
62.接着,对作业机器人70的结构的详情进行说明。如图4所示,作业机器人70例如是多关节型机器人,具备基部50、支承于该基部50的臂51以及安装于臂51的手指部的末端执行器(省略图示)。
63.臂51具备经由关节机构jt1~jt6串联地连结的6根连杆l1~l6。第一连杆l1的基端部经由第一关节机构jt1支承于基部50。第一关节机构jt1使第一连杆l1相对于基部50旋转。第一连杆l1的前端部与第二连杆l2的基端部经由第二关节机构jt2被连结。第二关节机构jt2使第二连杆l2相对于第一连杆l1弯曲旋转。第二连杆l2的前端部与第三连杆l3的基端部经由第三关节机构jt3被连结。第三关节机构jt3使第三连杆l3相对于第二连杆l2弯曲旋转。
64.另外,第三连杆l3的前端部与第四连杆l4的基端部经由第四关节机构jt4被连结。第四关节机构jt4使第四连杆l4相对于第三连杆l3扭曲旋转。第四连杆l4的前端部与第五连杆l5的基端部经由第五关节机构jt5被连结。第五关节机构jt5使第五连杆l5相对于第四连杆l4弯曲旋转。第五连杆l5的前端部与第六连杆l6的基端部经由第六关节机构jt6被连结。第六关节机构jt6使第六连杆l6相对于第五连杆l5扭曲旋转。各关节机构jt1~jt6包括关节轴72和对关节轴72进行旋转驱动的第一伺服马达71。此外,在各第一伺服马达71设置有检测其输出轴的旋转位移的旋转式编码器。
65.接下来,在本实施方式中,参照图4至图6,对一对往复杆2、2与定位器4之间的工件w的交接进行说明。
66.如上所述,定位器4预先以不与被输送的工件w接触的方式使定位销5的上端如图4所示那样退避到比被多个支承部3支承的状态下的工件w的最下部低的位置,直到工件w被一对往复杆2、2输送至规定的工作台s。
67.然后,在通过一对往复杆2、2将工件w输送到定位销5与被该定位销5插通的工件w的孔在铅垂方向一致的位置后,第二控制装置112通过第三移动模块43使各定位器4的定位销5上升。由此,在定位销5插通于工件w的孔从而该工件w被定位销5接受后,通过使定位销5进一步上升,而如图5所示那样成为工件w在规定高度被定位销5支承的状态。此外,在该情况下,定位销5的前端配置于比支承部3的上端高的位置。
68.接着,在作业机器人70对已被定位销5支承的状态下的工件w实施了作业后,第二控制装置112通过第三移动模块43使各定位器4的定位销5下降。由此,工件w如图6所示那样从定位销5向另一对往复杆2、2的支承部3、3被交接。在该情况下,定位销5的前端配置于比被多个支承部3支承的状态下的工件w的最下部低的位置。根据以上的方法,通过定位器4的定位销5的上下移动,能够进行一对往复杆2、2与定位器4之间的工件w的交接。
69.如以上说明的那样,根据本实施方式的工作流水线用输送系统100,被一对往复杆2、2输送来的工件w通过多个定位器4而配置为上升到规定位置(作业位置)。通过这样的结构,不需要利用升降器使往复杆上升,因此结构不会大型化。另外,通过在定位器4设置从一
对往复杆2、2接受工件w并使其上升到规定位置的功能,由此不需要在一对往复杆2、2设置升降机构。由此,不需要升降机构用的信号线等。由此,结构变得简单。据此,能够提供结构比以往简化而不是大型化的工作流水线用输送系统100。
70.另外,在本实施方式中,定位器4使定位销5的上端退避到比被多个支承部3支承的状态下的工件w的最下部低的位置,直到工件w被一对往复杆2、2输送。由此,在输送工件w时能够避免该工件w与定位器4的定位销5的干涉。
71.另外,在本实施方式中,多个定位器4在俯视时配置于一对往复杆2、2之间。由此,与将多个定位器4配置于一对往复杆2、2的外侧的情况相比,能够实现工作流水线用输送系统100的省空间化。
72.另外,在本实施方式中,在往复杆2的下部配置齿条12,由此粉尘难以积存于该齿条12。
73.另外,在本实施方式中,作为工件w的一个例子,采用了汽车的车身或者构成该车身的一部分的部件。通过将本发明应用于如上输送作为工件w的汽车的车身等的输送线,能够实现结构比以往简化而不是大型化的汽车组装用的工作流水线用输送系统100。
74.(变形例)
75.本发明不限定于上述的实施方式,能够在不脱离本发明的主旨的范围内进行各种变形。例如以下那样。
76.也可以将上述的图3的机器人系统200变形为以下那样。此外,对与图3相同的构成要素标注相同的附图标记并省略其说明。如图7所示,也可以构成为:通过机器人用控制装置111对作业机器人70的动作进行伺服控制,并且将驱动装置6的第一旋转轴9以及定位器4的第二旋转轴41作为外部轴而对驱动装置6的动作以及定位器4的动作进行伺服控制。在该情况下,由于第一旋转轴9以及第二旋转轴41作为外部轴被机器人用控制装置111控制,所以驱动装置6的错误代码、定位器4的错误代码与作业机器人70的错误代码相同,因此维护以及故障排除变得容易。
77.另外,在上述实施方式中,作为工件w的一个例子,采用了汽车的车身或者构成该车身的一部分的部件,但通过工作流水线用输送系统100输送的工件w不限定于上述,能够将需要作业机器人70的作业的其他的对象物、不需要作业机器人70的作业的对象物等各种对象物作为工件w来输送。
78.另外,在上述实施方式中,将设置于各工作台s的定位器4的数量设为4个,但定位器4的数量不限定于上述。
79.另外,在上述实施方式中,在往复杆2各自的下部设置齿条12,但不限定于这种结构,也可以构成为在往复杆2的上部设置齿条12。
80.另外,在上述实施方式中,构成为通过一对往复杆2、2输送1个工件w,但不限定于此,也可以构成为通过一对往复杆2、2输送多个工件w。
81.附图标记说明
[0082]1…
基座;2
…
往复杆;3
…
支承部;4
…
定位器;5
…
定位销;6
…
驱动装置;7a、7b
…
第二伺服马达;9
…
第一旋转轴;11
…
小齿轮;12
…
齿条;40
…
第三伺服马达;41
…
第二旋转轴;70
…
作业机器人;71
…
第一伺服马达;72
…
关节轴;100
…
工作流水线用输送系统;110
…
第一控制装置;111
…
机器人用控制装置;112
…
第二控制装置;200
…
机器人系统;d1
…
输送方
向;w
…
工件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。