技术特征:
1.一种工作流水线用输送系统,其特征在于,具备:一对往复杆,它们对工件进行支承,并在输送方向延伸;以及多个定位器,它们具有构成为能够在上下方向移动的多个定位销,所述多个定位器构成为在使所述多个定位销上升并通过该多个定位销从所述一对往复杆接受被所述一对往复杆输送至规定位置的所述工件后,进一步使所述多个定位销上升到规定高度而对所述工件进行上升配置。2.根据权利要求1所述的工作流水线用输送系统,其特征在于,所述多个定位器通过使所述多个定位销向下方移动而使所述工件下降,由此将所述工件交接给所述一对往复杆。3.根据权利要求1或2所述的工作流水线用输送系统,其特征在于,所述一对往复杆各自具有多个支承部,所述多个支承部在上下方向延伸并对所述工件进行支承,并且所述多个支承部相对于所述往复杆为固定式,所述多个定位器使所述多个定位销的上端退避到比被所述多个支承部支承的状态下的所述工件的最下部低的位置,直到所述工件被所述一对往复杆输送至所述规定位置。4.根据权利要求1~3中任一项所述的工作流水线用输送系统,其特征在于,所述多个定位器在俯视时配置于所述一对往复杆之间。5.根据权利要求1~4中任一项所述的工作流水线用输送系统,其特征在于,所述驱动装置包括双马达。6.根据权利要求1~5中任一项所述的工作流水线用输送系统,其特征在于,所述一对往复杆包括多对所述往复杆,所述工件以该工件为单位被所述一对往复杆输送。7.根据权利要求1~6中任一项所述的工作流水线用输送系统,其特征在于,还具备:齿条,其在所述输送方向延伸并设置于所述一对往复杆各自的下部;小齿轮,其与各所述齿条啮合;以及驱动装置,其与所述小齿轮连结并对该小齿轮进行旋转驱动。8.根据权利要求1~7中任一项所述的工作流水线用输送系统,其特征在于,所述工件是汽车的车身或构成该车身的一部分的部件。9.一种机器人系统,其特征在于,具备:权利要求1~8中任一项所述的工作流水线用输送系统、在所述输送方向并列设置的多个作业机器人、以及对所述多个作业机器人的动作进行控制的机器人用控制装置,在所述工作流水线用输送系统设置有对所述往复杆的动作进行控制的第一控制装置、和对所述多个定位器的动作进行控制的第二控制装置,所述机器人用控制装置、所述第一控制装置以及所述第二控制装置中的至少任意两个使所述多个作业机器人、所述往复杆以及所述多个定位器中的至少任意两个协同动作。10.一种机器人系统,其特征在于,具备:权利要求1~8中任一项所述的工作流水线用输送系统;以及多个作业机器人,它们在所述输送方向并列设置,并具有至少1个关节轴、和对该关节轴进行旋转驱动的至少1个第一伺服马达,所述驱动装置具有至少1个第一旋转轴、和对该第一旋转轴进行旋转驱动的至少1个第
二伺服马达,所述定位器具有至少1个第二旋转轴、和对该第二旋转轴进行旋转驱动的至少1个第三伺服马达,所述机器人系统还具备机器人用控制装置,所述机器人用控制装置对所述作业机器人的动作进行伺服控制,并且将所述驱动装置的所述第一旋转轴和所述定位器的所述第二旋转轴作为外部轴,来对所述驱动装置的动作和所述定位器的动作进行伺服控制。
技术总结
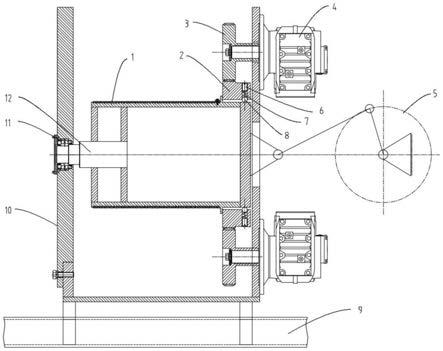
本发明提供一种结构比以往简化而不是大型化的工作流水线用输送系统以及具备该工作流水线用输送系统的机器人系统。工作流水线用输送系统具备:一对往复杆,它们对工件进行支承,并在输送方向延伸;和多个定位器,它们具有构成为能够在上下方向移动的多个定位销,上述多个定位器构成为在使多个定位销上升并通过该多个定位销从一对往复杆接受被一对往复杆输送至规定位置的工件后,进一步使所述多个定位销上升到规定高度而对所述工件进行上升配置。置。置。
技术研发人员:成相一志 广高荣将 井原大辅 宫内启德
受保护的技术使用者:川崎重工业株式会社
技术研发日:2020.08.24
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。