1.本发明涉及电子转向机技术领域,具体地说是一种转向机用光电式角度传感器。
背景技术:
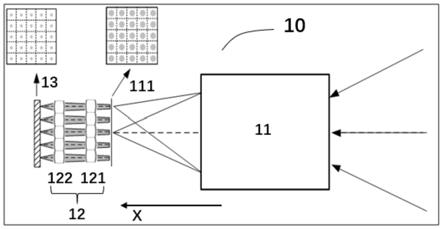
2.目前,转向机扭矩传感器集成的角度传感器采用行星齿轮结构加磁感应式,如图1所示,在固定在转向齿轮端的支架2上安装有大齿圈3,跟随转向齿轮转动,同时带动2个位置固定的行星齿轮4转动,行星齿轮4上安装有磁铁,且2个行星齿轮4的齿数不一样,行星齿轮4磁铁下方安装有对磁场变化敏感的磁阻传感器6以及处理信号的asic芯片。当转向齿轮转动时,2个行星齿轮4跟随转动,导致磁阻传感器6周边的磁场发生变化。磁阻传感器6将磁场的变化转换成电信号输入到asic芯片,通过asic芯片的计算两个行星齿轮4的位置差可进一步计算得到当前大齿圈3即转向齿轮的角度,并以sent协议的形式传输给ecu。
3.磁感应式扭矩传感器灵敏度较高,受温度等外界环境因素的影响较小,但是也存在成本相对较高、信号处理较复杂的问题。
4.因此,需要设计一种转向机用光电式角度传感器,以减少元器件,简化信号处理,降低生产成本。
技术实现要素:
5.本发明的目的是克服现有技术的不足,提供了一种转向机用光电式角度传感器,以减少元器件,简化信号处理,降低生产成本。
6.为了达到上述目的,本发明是一种转向机用光电式角度传感器,包括上盖板、光电传感器、渐变色环、连接器、外壳、电子控制单元,上盖板覆盖在外壳的顶部,外壳内安装有连接器,连接器与转向齿轮连接,连接器外套设有渐变色环,渐变色环的边缘正下方设有光电传感器一和光电传感器二,光电传感器一的感应电压信号输出端与电子控制单元的微控制器的模数转化通道一连接,光电传感器二的感应电压信号输出端与电子控制单元的微控制器的模数转化通道二连接。
7.所述的光电传感器一或光电传感器二的发射接收面与渐变色环之间的距离为2mm。
8.所述的光电传感器一或光电传感器二的型号为itr9909。
9.所述的电子控制单元所采用的微控制器的型号为tc299tp。
10.所述的电子控制单元设有电源管理模块,电源管理模块的输入端与12v电源连接,电源管理模块的输出端分别与光电传感器一、光电传感器二、微控制器的电源端连接。
11.所述的渐变色环随着转向齿轮转动,光电传感器一和光电传感器二接收到渐变色环反射的红外光并将电信号输出给微控制器,微控制器将电信号进行模数转换并形成传感器一电压值和传感器二电压值,根据传感器一电压值和传感器二电压值采用查表法及线性插值法获得当前角度值;如当前角度值大于上一角度值,则判断当前旋转方向为逆时针旋转,如当前角度值小于上一角度值,则判断当前旋转方向为顺时针旋转,将当前旋转方向储
存至寄存器;在存储器中设置计数器记录经过0
°
位置的次数,计数器初始值为0,逆时针旋转经过0
°
位置时,计数器数值加1,顺时针旋转经过0
°
位置,计数器数值减1;最终角度值=当前角度值 计数器数值*360
°
。
12.所述的查表法为根据传感器一电压值和传感器二电压值的具体数值,在电压角度表格内查找到对应的方向盘角度,即为当前角度值。
13.所述的线性插值法具体如下:步骤1,通过取整索引在电压角度表格内确定角度区域,再在区域内根据传感器一电压值检索最邻近的电压值点p1及对应的角度angle
p1
,并记录沿差值方向临近点角度angle
p1’,根据传感器二电压值检索最邻近的电压值点p2及对应的角度angle
p2
,并记录沿差值方向临近点角度angle
p2’;步骤2,计算传感器一电压值与最邻近的电压值点p1的差值一,差值百分比数值δ1等于差值一除以1度分辨电压,计算传感器二电压值与最邻近的电压值点p2的差值二,差值百分比数值δ2等于差值二除以1度分辨电压,传感器一的角度= angle p1
(angle p1’-ꢀ
angle p1
)*δ1,传感器二的角度= angle p2
(angle p2’-ꢀ
angle p2
)*δ2,当前角度值 =(传感器一的角度 传感器二的角度)/2。
14.所述的1度分辨电压=(渐变色环最浅处对应的电压值-渐变色环最深处对应的电压值)/渐变色环从最深处到最浅处需转动的角度。
15.所述的渐变色环为颜色深度线性渐变的圆环。
16.本发明同现有技术相比,通过设计颜色深度线性渐变的渐变色环,使得不同角度下光电传感器所吸收的反射光强度不一样,从而转变为变化的电信号输出。当转向齿轮转动带动渐变色环周向转动,两个光电传感器输出的电压也跟随线性变化,电子控制单元根据两个传感器电压值计算获得转向齿轮的最终角度值,本发明结构简单,减少了元器件,简化了信号处理,降低了生产成本。
附图说明
17.图1 为现有技术的爆炸图。
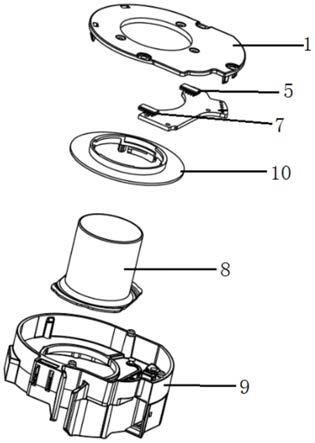
18.图2为本发明的爆炸图。
19.图3为本发明的轴测图。
20.图4为本发明的系统框图。
具体实施方式
21.现结合附图对本发明做进一步描述。
22.参见图2、图3和图4,本发明是一种转向机用光电式角度传感器,包括上盖板、光电传感器、渐变色环、连接器、外壳、电子控制单元,上盖板1覆盖在外壳9的顶部,外壳9内安装有连接器8,连接器8与转向齿轮连接,连接器8外套设有渐变色环10,渐变色环10的边缘正下方设有光电传感器一5和光电传感器二7,光电传感器一5的感应电压信号输出端与电子控制单元11的微控制器12的模数转化通道一连接,光电传感器二7的感应电压信号输出端与电子控制单元11的微控制器12的模数转化通道二连接。
23.本发明中,渐变色环10为颜色深度线性渐变的圆环。光电传感器一5和光电传感器二7的发射接收面与渐变色环10之间的距离为2mm,根据红外线波长的特性,该距离既能有效保证反射的红外光被接收,又能有效避免两个光电传感器之间光信号的串扰。
24.光电传感器一5或光电传感器二7的型号为itr9909。
25.参见图4,电子控制单元11设有电源管理模块13,电源管理模块13的输入端与12v电源连接,电源管理模块13的输出端分别与光电传感器一5、光电传感器二7、微控制器12的电源端连接,电子控制单元11所采用的微控制器的型号为tc299tp。
26.本发明在工作时,渐变色环10随着转向齿轮转动,光电传感器一5和光电传感器二7接收到渐变色环10反射的红外光并将电信号输出给微控制器12,微控制器12将电信号进行模数转换并形成传感器一电压值和传感器二电压值,根据传感器一电压值和传感器二电压值采用查表法及线性插值法获得当前角度值;如当前角度值大于上一角度值,则判断当前旋转方向为逆时针旋转,如当前角度值小于上一角度值,则判断当前旋转方向为顺时针旋转,将当前旋转方向储存至寄存器;在存储器中设置计数器记录经过0
°
位置的次数,计数器初始值为0,逆时针旋转经过0
°
位置时,计数器数值加1,顺时针旋转经过0
°
位置,计数器数值减1;最终角度值=当前角度值 计数器数值*360
°
。
27.查表法为根据传感器一电压值和传感器二电压值的具体数值,在电压角度表格内查找到对应的方向盘角度,即为当前角度值。电压角度表格如下:
线性插值法具体如下:步骤1,通过取整索引在电压角度表格内确定角度区域,再在区域内根据传感器一电压值检索最邻近的电压值点p1及对应的角度angle
p1
,并记录沿差值方向临近点角度angle
p1’,根据传感器二电压值检索最邻近的电压值点p2及对应的角度angle
p2
,并记录沿差值方向临近点角度angle
p2’;步骤2,计算传感器一电压值与最邻近的电压值点p1的差值一,差值百分比数值δ1等于差值一除以1度分辨电压,计算传感器二电压值与最邻近的电压值点p2的差值二,差值百分比数值δ2等于差值二除以1度分辨电压,传感器
一的角度= angle p1
(angle p1’-ꢀ
angle p1
)*δ1,传感器二的角度= angle p2
(angle p2’-ꢀ
angle p2
)*δ2,当前角度值 =(传感器一的角度 传感器二的角度)/2。
28.1度分辨电压=(渐变色环最浅处对应的电压值-渐变色环最深处对应的电压值)/渐变色环从最深处到最浅处需转动的角度。
29.实施例1本例中,渐变色环最浅处对应的电压值为4.5v,渐变色环最深处对应的电压值为0.5v,渐变色环从最深处到最浅处需转动的角度为180
°
,1度分辨电压=(4.5
ꢀ-
0.5)/180 = 0.02222 v。
30.若某时刻,传感器一电压值 = 2.05 v,传感器二电压值 = 1.03v,计数器数值为2,在电压角度表格内最邻近的电压值点p1为 2.044,对应的角度angle
p1
为314
°
,沿差值方向临近点角度angle
p1
’ 为313
°
,传感器一电压值与最邻近的电压值点p1的差值一为0.006v,差值百分比数值δ1为0.27,传感器一的角度= 314
°
(313
°-ꢀ
314
°
)*0.27=313.73
°
;在电压角度表格内最邻近的电压值点p2为 1.022,对应的角度angle
p1
为314
°
,沿差值方向临近点角度angle
p1
’ 为313
°
,传感器二电压值与最邻近的电压值点p2的差值二为0.008v,差值百分比数值δ2为0.36,传感器二的角度= 314
°
(313
°-ꢀ
314
°
)*0.36=313.64
°
,当前角度值 =(313.73
°
313.64
°
)/2 = 313.69
°
,最终角度值=313.69
°
2*360
°
=1033.69
°
。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。