1.本发明涉及一种超音速激光沉积加工设备,尤其是一种超音速激光沉积喷涂距离自动调高装置,属于激光复合制造领域。
背景技术:
2.超音速激光沉积技术是一种新型喷涂增材制造技术,是对冷喷涂技术的改进,是冷加工技术的革新,原理是粉末颗粒在高压气体带动下加速到超音速状态,与此同时引入激光对超音速状态粉末颗粒和基体表面同步进行激光辐照,激光使粉末材料和基体表面软化又不熔化,使粉末颗粒碰撞到基体表面使产生大的塑性变形,其保留了冷喷涂技术固态沉积特性,对喷涂粉末和基体的热输入小,保留材料原始物相组成和性能,能降低粉末临界沉积速度,改变材料沉积机制,可提高沉积效率和涂层结合强度,降低涂层孔隙率,从而提高涂层各项综合性能。超音速激光沉积技术不但克服了冷喷涂涂层结合不紧密、低沉积效率和高孔隙率等缺点,而且能够实现高硬度材料涂层的制备,扩大了材料和基体的使用范围。由于超音速激光沉积技术具有明显优势,因此被频繁应用到零件修复和强化工作中去。
3.利用超音速激光沉积技术进行修复和工业生产时,涉及到喷涂距离调整的问题,因为我们需要根据不同的材料特性设置特定的喷涂距离,但目前进行超音速激光沉积时喷涂距离都是由操作人员手工测量,采用一个交叉夹在直尺下量取想要调整到的长度,机械臂对喷涂距离进行调节时再用这个交叉尺距离去量取喷涂距离,量喷涂距离的过程当中交叉尺可能会松动,导致距离量取不准确,且每一次量取前都要重新调整,人肉眼观察时也会产生误差,从而导致喷涂距离误差较大,而且喷涂距离调节工作复杂繁琐,存在智能化程度不够及精确度不够的问题,不利于进行大规模的工业应用。
技术实现要素:
4.为了解决上述的技术问题,本发明的目的是提供一种超音速激光沉积喷涂距离自动调高装置。该装置能够实现智能化自动调整喷涂距离,可以实现喷涂距离的快速精确调整,且可以实现喷涂距离实时自动调整,快速高效,能够满足实验需求和工业应用,大大提高生产效率和精度。
5.为达到上述的目的,本发明采用了以下技术方案:
6.本发明所述的一种超音速激光沉积喷涂距离自动调高装置,其特征在于,包括:
7.工作台,置于安装面上,所述工作台的表面设有一置物平面,用于放置并固定基体;
8.位置调节机构,设置于工作台旁,包括机械臂底座和机械臂,所述机械臂底座固定于安装面上,所述机械臂的底部连接在机械臂底座上,所述机械臂的自由端安装加工机构,用于调节加工机构的位置;
9.加工机构,安装于所述机械臂的自由端,包括拉瓦尔喷嘴、激光头和红外测距传感器,所述拉瓦尔喷嘴悬装于所述机械臂的自由端,并且所述拉瓦尔喷嘴的喷嘴始终对准工
作台,用于在基体表面喷涂超音速状态的粉末颗粒;所述激光头、所述红外测距传感器通过第一连接组件设置于所述拉瓦尔喷嘴的下部,其中所述激光头射出的激光与所述拉瓦尔喷嘴喷出的粉末颗粒交汇于基体的加工表面,用于对喷涂于基体加工表面的粉末颗粒进行激光照射;所述红外测距传感器的测试头对准工作台,用于测量拉瓦尔喷嘴与基体的加工表面距离;
10.以及控制机构,设置于工作台旁,所述控制机构的外部设置有显示屏和控制按钮,所述显示屏的信号输入端口与所述控制机构的数据信号输出端口电连接,用于在显示屏上显示实时喷涂距离、扫描速度及扫描路径;所述控制按钮与所述控制机构的信号控制端口电连接,用于控制所述控制机构向加工机构和位置调节机构发出控制指令;所述控制机构的信号输出端通过第二信号电路传输总线与所述机械臂的控制端电连接;所述控制机构的信号输入端通过第一信号电路传输总线与所述红外测距传感器的信号输出端电连接。
11.进一步,所述机械臂为xyz平面的六自由度机械臂,并且所述机械臂的自由端安装第二连接件,所述第二连接件通过第三连接螺栓与所述拉瓦尔喷嘴的上部紧固。
12.进一步,所述拉瓦尔喷嘴的法线与基体表面垂直。
13.进一步,所述第一连接组件包括第一连接件、第一连接螺栓和第二连接螺栓,所述第一连接件通过第一连接螺栓紧固于所述拉瓦尔喷嘴的下部,并且所述第一连接件的一端活动安装所述激光头,另一端固定安装红外测距传感器。
14.进一步,所述激光头的法线与所述拉瓦尔喷嘴的法线夹角为锐角。
15.优选的,所述激光头的法线与所述拉瓦尔喷嘴的法线夹角在30
°
到50
°
之间。
16.进一步,所述红外测距传感器的法线与基体的加工表面垂直。
17.进一步,所述控制按钮包括开关按钮、调距按钮、复位按钮以及暂停/开启按钮,所述开关按钮、调距按钮、复位按钮以及用于控制装置暂停/开启按钮分别与所述控制机构相应的信号控制端口电连接;开关按钮可控制整个装置的电源开关,调距按钮可通过按钮输入所需喷涂距离,复位按钮可将整个装置进行复位,暂停/开启按钮可使整个装置运行暂停和出现启动,显示屏可显示目前的实时喷涂距离和扫描速度及扫描路径。
18.本发明工作过程是:根据需要调节控制按钮,红外测距传感器测量拉瓦尔喷嘴与基体的加工表面之间的距离,然后通过第一信号与电路传输总线实时传输给控制机构,控制机构计算并输出控制脉冲信号,并通过第二信号与电路传输总线给机械臂,精准控制机械臂以调整拉瓦尔喷嘴和激光头的位置,从而调整喷涂距离。
19.本发明的有益效果是:可快速精准控制喷嘴与基体表面的喷涂距离,实现喷涂距离实时智能化调整,显示屏还可实时显示喷涂信息,方便操作人员观察,自动化取代人工操作,从而提高超音速激光沉积效率和涂层质量。
附图说明
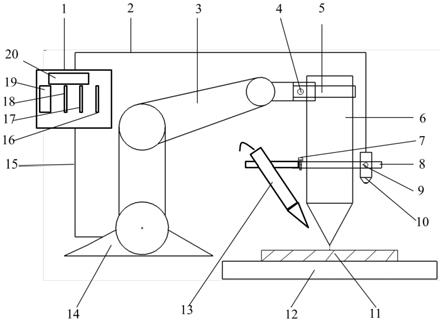
20.图1是本发明的结构示意图;
21.1-控制机构,2-第一信号与电路传输总线,3-机械臂,4-第三连接螺栓,5-第二连接件,6-拉瓦尔喷嘴,7-第一连接螺栓,8-第一连接件,9-第二连接螺栓,10-红外测距传感器,11-基体,12-工作台,13-激光头,14-机械臂底座,15-第二信号与电路传输总线,16-暂停/开启按钮,17-复位按钮,18-调距按钮,19-开关按钮,20-显示屏。
具体实施方式
22.下面结合附图进一步说明本发明。
23.参照附图:
24.实施例1本发明所述的一种超音速激光沉积喷涂距离自动调高装置,包括:
25.工作台12,置于安装面上,所述工作台的表面设有一置物平面,用于放置并固定基体11;
26.位置调节机构,设置于工作台12旁,包括机械臂底座14和机械臂3,所述机械臂底座14固定于安装面上,所述机械臂3的底部连接在机械臂底座14上,所述机械臂3的自由端安装加工机构,用于调节加工机构的位置;
27.加工机构,安装于所述机械臂3的自由端,包括拉瓦尔喷嘴6、激光头13和红外测距传感器10,所述拉瓦尔喷嘴6悬装于所述机械臂3的自由端,并且所述拉瓦尔喷嘴6的喷嘴始终对准工作台12,用于在基体11表面喷涂超音速状态的粉末颗粒;所述激光头6、所述红外测距传感器10通过第一连接组件设置于所述拉瓦尔喷嘴的下部,其中所述激光头13射出的激光与所述拉瓦尔喷嘴6喷出的粉末颗粒交汇于基体的加工表面,用于对喷涂于基体加工表面的粉末颗粒进行激光照射;所述红外测距传感器10的测试头对准工作台,用于测量拉瓦尔喷嘴与基体的加工表面距离;
28.以及控制机构1,设置于工作台12旁,所述控制机构1的外部设置有显示屏20和控制按钮,所述显示屏20的信号输入端口与所述控制机构1的数据信号输出端口电连接,用于在显示屏20上显示实时喷涂距离、扫描速度及扫描路径;所述控制按钮与所述控制机构1的信号控制端口电连接,用于控制所述控制机构向加工机构和位置调节机构发出控制指令;所述控制机构1的信号输出端通过第二信号电路传输总线15与所述机械臂3的控制端电连接;所述控制机构1的信号输入端通过第一信号电路传输总线2与所述红外测距传感器10的信号输出端电连接。
29.所述机械臂3为xyz平面的六自由度机械臂,并且所述机械臂3的自由端安装第二连接件5,所述第二连接件5通过第三连接螺栓4与所述拉瓦尔喷嘴6的上部紧固。
30.所述拉瓦尔喷嘴6的法线与基体11表面垂直。
31.所述第一连接组件包括第一连接件8、第一连接螺栓7和第二连接螺栓8,所述第一连接件8通过第一连接螺栓7紧固于所述拉瓦尔喷嘴6的下部,并且所述第一连接件8的一端活动安装所述激光头13,另一端固定安装红外测距传感器10。
32.所述激光头13的法线与所述拉瓦尔喷嘴6的法线夹角为锐角。
33.所述激光头13的法线与所述拉瓦尔喷嘴6的法线夹角在30
°
到50
°
之间。
34.所述红外测距传感器10的法线与基体11的加工表面垂直。
35.所述控制按钮包括开关按钮19、调距按钮18、复位按钮17以及暂停/开启按钮16,所述开关按钮19、调距按钮18、复位按钮17以及暂停/开启按钮16分别与所述控制机构1相应的信号控制端口电连接;开关按钮19可控制整个装置的电源开关,调距按钮18可通过按钮输入所需喷涂距离,复位按钮17可将整个装置进行复位,暂停/开启按钮16可使整个装置运行暂停和出现启动,显示屏20可显示目前的实时喷涂距离和扫描速度及扫描路径。
36.本发明工作过程是:拉瓦尔喷嘴6和激光头13的移动由机械臂3完成,根据需要调节控制按钮,红外测距传感器10测量拉瓦尔喷嘴6与基体11的加工表面之间的距离,然后通
过第一信号与电路传输总线2实时传输给控制机构1,控制机构1计算并输出控制脉冲信号,并通过第二信号与电路传输总线15给机械臂3,精准控制机械臂以调整拉瓦尔喷嘴6和激光头13的位置,从而调整喷涂距离。
37.所述的红外测距传感器10测距原理是,红外测距传感器10是固定在拉瓦尔喷嘴6上的,其红外发射头与喷嘴的头距离保持不变,减去红外光这段距离的时间,红外测距传感器10根据红外光发出到返回被接受的时间传输给控制机构1可换算出目前的喷涂距离,从而进行喷涂距离调整。
38.实施例2如图1所示的一种超音速激光沉积喷涂距离自动调高装置的安装及测试过程如下:
39.先将拉瓦尔喷嘴6通过第二连接件5固定在机械臂3的自由端,通过第三连接螺栓4紧固;
40.再将激光头13和红外测距传感器10通过第一连接件固定在拉瓦尔喷嘴6上,通过第一连接螺栓7和第二连接螺栓9紧固第一连接件和红外测距传感器10,将基体11水平固定在工作台12上;
41.开启开关按钮19启动整个装置,再操作机械臂3使拉瓦尔喷嘴6法线垂直于基体11表面,再调整红外测距传感器10使其法线垂直于基体11表面;
42.通过调距按钮18调节到所要的喷涂距离,确认喷涂距离后,红外测距传感器10会将目前的喷涂距离信息传输给控制机构1,控制机构1再根据程处理结果发出调整信号给机械臂3,机械臂3进行姿态调整喷涂距离到设定的喷涂距离,最后调整激光头13法线与拉瓦尔喷嘴6法线所成的角度,使激光光斑和粉斑能重合在基体11表面;喷涂距离可以在喷涂过程中进行实时调整,关于喷涂的喷涂距离、扫描速度和扫描路径等信息可实时显示在显示屏20上;
43.准备就绪后,开启暂停/开启按钮16进行控制喷涂过程的开始和暂停,便于操作人员操作或者换样,实验开始和结束后可通过复位按钮17对整个装置进行复位。
44.本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围不应当被视为仅限于实施例所陈述的具体形式,本发明的保护范围也包括本领域技术人员根据本发明构思所能够想到的等同技术手段。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。