1.本发明涉及灭火机器人,特指一种小型履带式灭火机器人。
背景技术:
2.随科学技术的进步和社会现代化的快速发展,家庭与小型工厂所使用的电气化设备数量也在蓬勃增加。但由于当前设备出厂的质量问题和使用不当等造成的问题,导致突发性火灾的数量也在增加。当发生火灾事故时,消防人员必须穿戴厚重的灭火装备,以确保自身安全并提高灭火效率。基于火灾的重大危害及消防人员的生命安全考虑,迫切需要一种可以代替人工灭火的智能机器人参与灭火救援,以此减少人身伤害并大幅度提高救火效率。因此,在紧急时刻取代现有消防员工作的灭火机器人是十分有意义的。作为一种具有可完全替换的消防设备,消防机器人具有许多优势:可以代替消防员进行消防操作,并避免救援人员的伤亡;易于维修和保养,使用寿命长;具有一定程度的灵活性,能够借助行走装置穿梭于多种地表进行作业;能够远距离作业,且反应迅速,并有相对稳定的可靠性;能够适应各类火灾环境,并根据不同的火灾需求进行调整;功能丰富,能够适应多种救援工作。
3.目前,我国的智能机器人虽然有了较大的发展,例如协作技术的发展和感知系统的研究等领域。但是这些成就主要用于生产和制造,在某些危险场所(爆炸和有毒气体)因意外发生火灾并无相适应的灭火机器人进行灭火救援。因此,本发明的设计研究对我国灭火机器人的发展具有重要意义。
技术实现要素:
4.本发明的目的是提供一种基于履带式行走机构的智能灭火小车,来代替消防人员进入现场,并对周围环境进行侦察、报警,以此来避免救援人员的生命安全受到威胁。本发明的履带式灭火机器人主要针对的是家庭、小型工厂发生意外等情况造成的火灾,具有相对稳定性,能在一定环境下实时侦察周围情况,并报警通知消防人员进行灭火救援的机器人。
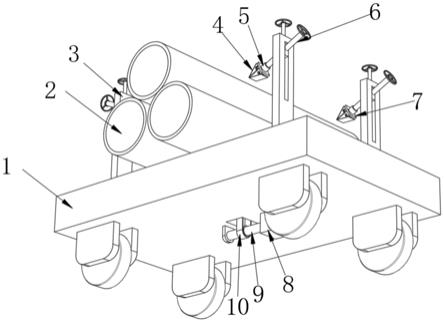
5.如图1所示为灭火机器人模型运动机构示意图,灭火机器人的运动机构由驱动轮,支重轮,机架连接件,弹簧,机架,螺柱,轮间轴,导向轮,履带组成。
6.一对驱动轮通过3个螺柱连接保持相对位置不变,通过传动轴与底盘电机相连,驱动轮的外齿与履带相啮合。共有4对支重轮,一对支重轮通过3个螺柱保持相对位置不变,并通过轮间轴固定在机架连接件上。导向轮通过3个螺柱保持相对位置不变,并通过轮间轴固定在机架上。
7.履带的材料为橡胶,长为2300mm,宽为200mm。其特征在于:具有弹性,并且耐磨,在地形较为复杂的火灾现场起到缓冲减震的作用以保护灭火机器人上的其他零件。驱动轮为整个灭火小车运动的来源,通过传动轴与电机直接相连,为小车提供输出扭矩。在小车运行过程中,驱动轮与履带相配合,带动履带向前做平铺运动,使得履带前行,达到行驶的作用。本发明所选择的驱动轮的齿数为z=6,驱动轮分度圆直径d=216mm,如图2所示。导向轮和
支重轮都采用对称结构形式,导向轮通过轮间轴与机架相连接,低于驱动轮20mm~30mm。支重轮采用机架连接件与机架连接。本发明的灭火小车的导向轮直径为dk=180mm,支重轮为90mm,如图3所示。驱动轮传动轴结构如图4所示,轴总长为143mm,分为转动段、定位端和传动段,在转动段中直径d1=143mm,长度为78mm,从左边向内有一个直径为20mm的螺纹孔,螺母通过与螺纹配合与定位段的左侧轴肩将安装在转动段上的驱动轮固定。在定位端中:其作用为固定驱动轮与电机的相对位置,直径d2=63mm,长度为9mm。在传动段中:其右侧与电机相接,直径d3=33mm,长度为56mm,并有一个直径为18mm的螺纹孔。本发明的灭火小车机架部分分为两块,上机架用于安装控制系统,下机架用于固定驱动轮、支重轮、导向轮和弹簧,如图5、6所示。上机架与下机架用铝合金作为制作材料,其特征在于铝合金具有重量轻和高强度的特点,能在一定程度上为小车提供更稳定的底座结构,并减轻小车的重量,提高运行效率。机架连接件材料为45号钢,如图7所示,用来连接支重轮和机架,使机架上相应的重力能均匀分布在支重轮上,并在机架连接件的头部设有一个挂钩,与弹簧的一端相连接,如图7所示,弹簧的另一端与机架上的挂钩相连接,机架连接件上部有一个凸出的圆轴,与机架上的槽相配合,灭火机器人在平地上行驶时,机架连接件处在图7原始位置,当越过障碍物时,在弹簧拉力的作用下使机架连接件头部的圆轴在槽内往复滑动,从而使支重轮可以上下移动,当越过障碍物之后,机架连接件和支重轮恢复到原始位置。
8.智能灭火机器人控制系统具备了蜂鸣器报警、主动避障、火源检测等功能。相应的控制系统主要由以下六个模块组成:蜂鸣器模块、火源检测模块、喷水模块、避障模块、电机驱动模块、中央处理器,如图8所示;蜂鸣器模块、火源检测模块、喷水模块、避障模块、电机驱动模块均与中央处理器连接。
9.中央处理器是灭火小车的核心控制器,控制着整个小车的运动,并从相连的模块中进行数据的获取,对其所传输的数据进行实时的处理,来驱动电机驱动模块做出相应的动作。本发明是基于stm32f103x8芯片控制的灭火机器人。
10.单片机stm32通过对电机驱动模块的控制,从而控制电机的转向,机器人的运行发生相应的改变。本发明的电机驱动模块采用的是l298n。
11.hc-sr04超声波测距模块,即避障模块,测量范围在2cm-400cm之间,能够进行不与实物接触就可以实现距离检测的功能。hc-sr04超声波测距模块由一个超声波发射器、一个超声波接收器和控制电路组成。在hc-sr04超声波测距模块中,vcc提供5v电源,gnd为接地线,trig为触发信号线,echo为回向信号输出线。基本原理如下:采用io口trig触发测距,给至少10us的高电平信号,在trig触发到来后,超声波发射器会自动发出8个40khz的方波,并且检测是否有信号返回,当超声波接收器接收到超声波时,表明有信号返回,通过io口echo输出一高电平,高电平持续的时间就是超声波从发射到返回的时间。因此测量距离=(高电平持续时间
×
340m/s)/2,测量时序图如图9所示。
12.温度检测模块,即火源检测模块,是灭火小车特有的存在,由5个温度检测器构成,温度检测器检测火源或者波长为760nm~1100nm的光源,探测的角度为50-70
°
;本发明采用了5个温度检测器对车身前端180
°
范围内的火源进行实时检测。温度检测器电路图如图10所示。
13.在图11的灭火机器人模型底盘结构示意图中,喷水模块由储水器、导水管、喷水管和电磁阀组成。储水器用于存储水,通过导水管、电磁阀与喷水管相连,在在喷水管上由多
个小孔,在喷水的过程中通过小孔将水向外喷洒。
14.履带式灭火机器人控制系统主要采用的器材如表2所示。
附图说明
15.图1灭火机器人模型运动机构示意图。
16.图2驱动轮结构图示意图。
17.图3导向轮与支重轮示意图。
18.图4驱动轴示意图。
19.图5下机架示意图。
20.图6上机架示意图。
21.图7机架连接件示意图。
22.图8灭火机器人模型控制系统模块示意图。
23.图9超声波时序图。
24.图10温度检测器电路图示意图。
25.图11灭火机器人模型底盘结构示意图。
26.图12遥控器。
27.表1端口与运动方向关系表。
28.表2机器人主要器材。
29.1-驱动轮 2-支重轮 3-机架连接件 4-弹簧 5-机架 6-螺柱 7-轮间轴 8-导向轮 9-履带 10-储水器 11-中央处理器 12-避障模块 13-火源检测模块 14-喷水模块 15-导水管 16-喷水管。
具体实施方式
30.本发明的履带式灭火机器人具有两种运动模式,分别为遥控控制和自动控制。1、接通电源,小车所有指示灯亮起,此时为等待信号阶段。
31.2、在遥控控制状态下,通过遥控器可以控制小车的前后左右移动;
32.3、通过遥控器的自动启动按钮,小车进入自动模式。此时小车自行前进,若遇见障碍,hc-sr04超声波测距模块会及时检测到前方的障碍物,并通过控制电路调整舵机方向,避免与障碍物发生碰撞并继续移动。当存在火源时,履带式灭火机器人上的温度检测器会接收到热源信号,并将热源信号转化成电信号,通过控制电路传输到中央处理器,中央处理器会将电信号传输给蜂鸣报警器,小车的蜂鸣器会自动报警。如图12,当听到报警声时,此时操作者可以按遥控器上的控制键1,控制小车喷水作业。控制小车的控制健2,可以停止喷水。
33.表1端口与运动方向关系表
[0034][0035]
表2机器人主要器材
[0036]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。