基于单地址lut表的光声图像反投影重构方法
技术领域
1.本发明属于光声成像方法技术领域,涉及一种基于单地址lut表的光声图像反投影重构方法。
背景技术:
2.光声成像(photoacoustic imaging,pai))基本原理是当使用非电离辐射(如激光或微波脉冲)照射在人体内的肿瘤上时,肿瘤吸收能量,并转换为热能,温度瞬时升高。由于热量传导相对温度升高要慢很多,可以忽略,从而在组织内部激发出兆赫兹级的超声波,即光声波。光声波携带了组织的电磁吸收分布特性,使用超声换能器探测到光声波后,就可采用相应的图像重建算法计算出组织内部的电磁吸收分布图像。其实光声效应早在1880年就被发现,但只到20世纪90年代,光声效应才被尝试应用于医学成像,2003年《nature》报导了wang等利用脉冲激光器采用光声成像技术清晰地探测到活体小鼠脑血管的分布,并得到了脑实质病损的清晰成像,推动了纳秒激光脉冲诱导的光声成像技术的发展。
3.由于光声成像与光学成像不同,光声成像主要依赖的是生物分子吸收激光脉冲瞬间产生热弹性膨胀来产生声波,而声信号在人体组织中的散射比光低2~3个数量级,因此,光声成像具有与超声成像相当的成像深度和空间分辨率,如在5cm的探测深度下,其分辨率约为0.8mm。可以实现从细胞级到小动物大脑、人体淋巴结癌、乳腺癌及前列腺癌等分辨率从微米到毫米不等的多尺度生物医学成像。
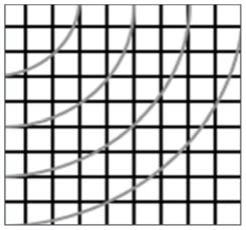
4.比较经典的光声成像算法是反投影算法,如图1,左侧为重构图像,右侧为生物组织,内部有一肿瘤组织点m,在生物组织的边界放置至少三个以上的超声探测器的探头。(注:一般超声探测器为线阵探测器,探头在100个以上。)
5.由图1可知:三个探头距离组织点的距离不同,三条弧线的交点即可确定该组织点的大概位置,再通过相应的计算即可得到每个探头距离该点距离。反投影过程中根据探测器上每个点到达的时间进行计算得到探测器与生物组织的距离,从而根据这个距离在在重构图像上进行卷积的过程。
6.为了提供重构的光声图像的质量,一般都会采用比较多的探测器进行信号的采集和重构,例如基于216个探头组成的线性阵列探测器采集光声信号来重构生物组织的位置,若采用经典反投影算法进行计算,则对于每一个探头都需要进行一次计算,每次计算都有平方和开方运算,共需进行216次才能确定一个点的位置,此方法的缺点是运算量较大,过程较为复杂,因此,会引入超大的计算量和存储容量需求。
技术实现要素:
7.本发明的目的是提供一种基于单地址lut表的光声图像反投影重构方法,解决了现有技术中存在的计算量大以及多lut查找表存储量大的问题。
8.本发明所采用的技术方案是,基于单地址lut表的光声图像反投影重构方法,具体按照如下步骤实施:
9.步骤1,根据线性阵列超声探测器的探头个数m、线性阵列超声探测器侧采集点数n,即就是单个探头的采集时间点数的总数n;
10.步骤2,根据线性超声探测器的探头个数m以及单个探头的采集时间点数的总数n确定重构的图像分辨率为m*n;
11.步骤3,根据第一个探头的采用频率、有效信号总时间、超声在生物组织中的传播速度和重构图像的尺寸或分辨率,根据反投影算法预构建第一个探头的lut查找表;查找表的大小和重构图像的分辨率一致且为m*n,查找表信息就是将重构图像的坐标和超声信号的坐标相互对应起来的数据表,利用查找表的信息可以直接将重构图像的坐标所对应的超声信号的坐标找到,将对应的幅值叠加到重构图像坐标处;
12.步骤4,根据线性阵列超声探测器中两探头间距,重构出其他剩余探头的lut查找表,根据所有lut查找表之间的规律,重构出一个总的lut查找表;
13.步骤5,光声图像重构时,根据要去重构的探头上的数据,用步骤3得到第一个探头的lut查找表和步骤4得到其他探头lut查找表的推断方法推出该探头对应的查找表;
14.步骤6,根据每个探头对应的查找表找到相应的重构图像像素点的坐标,然后将相应的探头上的该点超声信号的幅值累加到重构图像该点的像素值上即可重构出需要的光声图像。
15.本发明的特征还在于,
16.步骤1中线性阵列超声探测器侧采集点数n根据如下公式计算:
17.n=t/t
18.其中,t为线性阵列超声探测器的一个采样周期,t=1/f,f为线性阵列超声探测器上信号的采样频率,t为探头的有效信号总时间。
19.步骤3具体为:
20.步骤3.1,建立一个m
×
n的0矩阵,矩阵命名为a,其中m为探头个数,n为单个探头的采集时间点数的总数;
21.步骤3.2,首先定义变量y为探头序列号,取值范围为1-m,x为探头采集时间点数,取值范围为1-n,以1号探测器位置为原点建立直角坐标系,横坐标最小单位为探头在一个周期中采集深度h(1),纵坐标最小单位为两个探头的相邻距离,以1号探头位置点为圆心,深度h(x)=xvt为半径绘制n个圆弧,圆弧与y=1,2
…
m相交产生一交点,其中v为超声在生物组织的传播速度;
22.步骤3.4,将用来绘制圆弧的半径中的x作为矩阵第一位地址,交点的纵坐标为矩阵第二位地址,交点的横坐标作为幅值写入矩阵,得到1号传感器的lut查找表。
23.步骤3.2进行画弧的过程中,当交点坐标为小数时,对交点采用近似取整操作,使得交点坐标都是1的整数倍。
24.h(1)=vt。
25.步骤4具体为:
26.由于每一路探头所探测的时间步长与探测周期是相同的,因此每个探测点之间的间距也是相同的,即每点画弧的半径相同,对1号探头每点进行画弧所对应交点的坐标,同样过程对2号探头每点画弧得到所对应交点的坐标,2号探头的坐标相较于1号探头向下平移一个格点,且第一行弧线交点横坐标与第三行交点横坐标相同,lut查找表就是弧线交点
坐标信息,2号探头的lut查找表即为将一号探头整体向下平移一行且将1号探头的lut查找表第2行整体复制到2号探头lut查找表的第一行;以此类推,3号探头lut查找表即为将1号查找表向下平移两行,将1号探头查找表的2和3两行作为3号探头查找表的2和1两行,根据这一规律重构出一个总的lut查找表,共有2m-1行,第m行为1号表的第一行,第m-1行和第m 1行都为1号探头查找表第二行,第m-2行和第m 2行都为1号探头查找表的第三行,以此类推,根据1号探头的lut查找表即可推断出其余所有探头的lut查找表。
27.步骤4具体为:
28.设定线阵超声探测器满足下面两个要求:
29.①
每个探头之间的间距为一固定值;
30.②
每个探头的采集频率和有效信号的总时间相同;
31.利用这两条约束条件推断出其余m-1个探头的lut查找表,再根据所有lut查找表之间的规律,重构出一个总的lut查找表,推导步骤具体为:
32.步骤4.1,y号探头的lut查找表第y行的数据同1号探头的第一行数据一致,将1号探头的lut查找表的第一行填入;
33.步骤4.2,当y号探头的lut查找表中其余行距离第y行的行数间距和1号探头的lut查找表中其余行距离第1行行数间距一致时,其行内的数据也一致,将行数间距一致的数据填入,可以重构出y号探头的lut查找表;
34.步骤4.3,根据步骤4.2和步骤4.3从第二号探头的lut查找表重构到m号探头的lut查找表,得出所有探头的lut查找表;
35.步骤4.4,根据所有lut查找表之间的规律,重构出一个总的lut查找表,总的lut查找表为将1号探头的lut查找表中除去第一行的所有数据对于第一行位置处做对称,重构出2m-1行总的lut查找表,即在总的lut查找表中的第m行为1号探头lut查找表的第一行的数据,第m-1行和第m 1行为1号探头lut查找表的第二行的数据,依次类推,第1行和第2m-1行为1号探头lut查找表的第m行的数据,重构出一个总的lut查找表。
36.本发明的有益效果是:
37.本发明认为当超声探测器的采样频率是定值时,那么超声探测器上的每一个采样点的时间是确定的,该点到发出该超声信号生物组织的距离是确定的,而该值投影到确定大小的光声图像上的哪些点也是确定的,即通过对同一列上的点进行反投影画弧半径也为定值。我们只要将每一个探测器上的每一点所对应的光声重构图像上的坐标值找到,并制作成一个lut查找表,则在进行光声图像重构上,只要对该探测器上数据的点进行计数,得到是第几个点,就可以去查找该预处理好的lut表格即可快速对该图像进行快速重构,而不用再去遍历计算整个图像上的点与探测器之间的距离,这样将求距离的平方和开方过程简化成了查表的过程,极大减少了整个计算过程的计算量;
38.同时,本发明对每路探测器制作的lut查找表进行分析,因为对于已经确定型号的线阵探测器,探测器探头之间的距离是确定的,即可发现每个lut查找表之间存在一定的规律,可由一个lut查找表快速地推算出其他探测器上的像素点的位置,而不用对所有探测器上的lut表进行存储,因此,大大降低了存储器的容量要求。
39.本发明是大大地简化了经典反投影算法的整个硬件系统设计,可以用较少的硬件资源重建出需要的光声图像。
附图说明
40.图1是本发明背景技术中提到的现有反投影光声成像过程图;
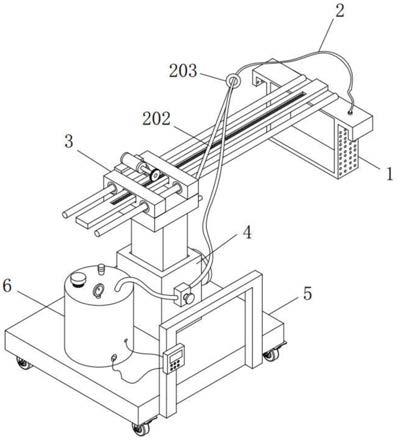
41.图2是本发明基于单地址lut表的光声图像反投影重构方法中探头上每个点反投影示意图;
42.图3是本发明基于单地址lut表的光声图像反投影重构方法中1到2号探头探测点lut表推导示意图;
43.图4是本发明基于单地址lut表的光声图像反投影重构方法中初始生物组织模型图;
44.图5是本发明基于单地址lut表的光声图像反投影重构方法中模拟光声波在生物组织中的传播过程图;
45.图6是本发明基于单地址lut表的光声图像反投影重构方法中1号探头上采集到的光声波部分波形图;
46.图7是本发明基于单地址lut表的光声图像反投影重构方法实施例中216个探头上采集到的光声波模拟数据图;
47.图8是本发明基于单地址lut表的光声图像反投影重构方法实施例中1号探头的lut表部分数据;
48.图9是本发明基于单地址lut表的光声图像反投影重构方法实施例中制作的总lut表部分数据;
49.图10是本发明基于单地址lut表的光声图像反投影重构方法实施例中labview重建的图像。
具体实施方式
50.下面结合附图和具体实施方式对本发明进行详细说明。
51.本发明基于单地址lut表的光声图像反投影重构方法,具体按照如下步骤实施:
52.步骤1,根据线性阵列超声探测器的探头个数m、线性阵列超声探测器侧采集点数n,即就是单个探头的采集时间点数的总数n,其中,线性阵列超声探测器侧采集点数n根据如下公式计算:
53.n=t/t
54.其中,t为线性阵列超声探测器的一个采样周期,t=1/f,f为线性阵列超声探测器上信号的采样频率,t为探头的有效信号总时间;
55.步骤2,根据线性超声探测器的探头个数m以及单个探头的采集时间点数的总数n确定重构的图像分辨率为m*n,也即有多少个探头对应于重构图像有多少行;
56.步骤3,根据第一个探头的采用频率、有效信号总时间、超声在生物组织中的传播速度和重构图像的尺寸或分辨率,根据反投影算法预构建第一个探头的lut查找表;查找表的大小和重构图像的分辨率一致且为m*n,查找表信息就是将重构图像的坐标和超声信号的坐标相互对应起来的数据表,利用查找表的信息可以直接将重构图像的坐标所对应的超声信号的坐标找到,将对应的幅值叠加到重构图像坐标处;具体为:
57.步骤3.1,建立一个m
×
n的0矩阵,矩阵命名为a,其中m为探头个数,n为单个探头的采集时间点数的总数;
58.步骤3.2,首先定义变量y为探头序列号,取值范围为1-m,x为探头采集时间点数,取值范围为1-n,以1号探测器位置为原点建立直角坐标系,横坐标最小单位为探头在一个周期中采集深度h(1)=vt,为了方便构建lut查找表,令vt=1,即探头在一个周期中的采集深度为1,纵坐标最小单位为两个探头的相邻距离,每个探头之间的间距为1,即线性阵列探测器的总长度为m-1,以1号探头位置点为圆心,深度h(x)=xvt为半径绘制n个圆弧,圆弧与y=1,2
…
m相交产生一交点,在进行画弧的过程中,当交点坐标为小数时,对交点采用近似取整操作,使得交点坐标都是1的整数倍,其中v为超声在生物组织的传播速度;例如:当x取5时,以1号探测器位置为圆心,5vt为半径画弧,与y=2交点为(5,2),与y=4交点为(4,4),如图2所示。
59.步骤3.4,将用来绘制圆弧的半径中的x作为矩阵第一位地址,交点的纵坐标为矩阵第二位地址,交点的横坐标作为幅值写入矩阵,得到1号传感器的lut查找表;例如:a(7,4)幅值为6,含义为1号传感器第7个时间点探测深度为半径画弧,与直线y=4,也就是过4号传感线水平直线交点为(6,4)。
60.步骤4,根据线性阵列超声探测器中两探头间距,重构出其他剩余探头的lut查找表,根据所有lut查找表之间的规律,重构出一个总的lut查找表;具体为:
61.由于每一路探头所探测的时间步长与探测周期是相同的,因此每个探测点之间的间距也是相同的,即每点画弧的半径相同,图3中对1号探头每点进行画弧所对应交点的坐标,同样过程对2号探头每点画弧得到所对应交点的坐标,由图3可知,2号探头的坐标相较于1号探头向下平移一个格点,且第一行弧线交点横坐标与第三行交点横坐标相同,lut查找表就是弧线交点坐标信息,2号探头的lut查找表即为将一号探头整体向下平移一行且将1号探头的lut查找表第2行整体复制到2号探头lut查找表的第一行;以此类推,3号探头lut查找表即为将1号查找表向下平移两行,将1号探头查找表的2和3两行作为3号探头查找表的2和1两行,根据这一规律重构出一个总的lut查找表,共有2m-1行,第m行为1号表的第一行,第m-1行和第m 1行都为1号探头查找表第二行,第m-2行和第m 2行都为1号探头查找表的第三行,以此类推,根据1号探头的lut查找表即可推断出其余所有探头的lut查找表;步骤4具体为:
62.设定线阵超声探测器满足下面两个要求:
63.③
每个探头之间的间距为一固定值;
64.④
每个探头的采集频率和有效信号的总时间相同;
65.利用这两条约束条件推断出其余m-1个探头的lut查找表,再根据所有lut查找表之间的规律,重构出一个总的lut查找表,推导步骤具体为:
66.步骤4.1,y号探头的lut查找表第y行的数据同1号探头的第一行数据一致,将1号探头的lut查找表的第一行填入;
67.步骤4.2,当y号探头的lut查找表中其余行距离第y行的行数间距和1号探头的lut查找表中其余行距离第1行行数间距一致时,其行内的数据也一致,将行数间距一致的数据填入,可以重构出y号探头的lut查找表;
68.步骤4.3,根据步骤4.2和步骤4.3从第二号探头的lut查找表重构到m号探头的lut查找表,得出所有探头的lut查找表;
69.步骤4.4,根据所有lut查找表之间的规律,重构出一个总的lut查找表,总的lut查
找表为将1号探头的lut查找表中除去第一行的所有数据对于第一行位置处做对称,重构出2m-1行总的lut查找表,即在总的lut查找表中的第m行为1号探头lut查找表的第一行的数据,第m-1行和第m 1行为1号探头lut查找表的第二行的数据,依次类推,第1行和第2m-1行为1号探头lut查找表的第m行的数据,重构出一个总的lut查找表;
70.步骤5,光声图像重构时,根据要去重构的探头上的数据,用步骤3得到第一个探头的lut查找表和步骤4得到其他探头lut查找表的推断方法推出该探头对应的查找表;
71.步骤6,根据每个探头对应的查找表找到相应的重构图像像素点的坐标,然后将相应的探头上的该点超声信号的幅值累加到重构图像该点的像素值上即可重构出需要的光声图像。
72.本发明提出的基于单地址lut查找表的光声反投影成像过程,在本发明中,可替代技术特征的元素是单地址lut查找表重构的尺寸是根据探测器可以探测出的生物组织深度、系统采样频率等硬件决定的,这也决定了重构图像的列数。成像的分辨率和线性阵列探测器探头的多少有关,如果是m个探头的线阵,则图像的行数则为m。
73.本发明对重构图像时1号探头上探头上的采集点进行反投影重构时,设计了一个采集点与光声图像像素点坐标相对应的lut查找表,该过程可以大大节约光声图像重建的计算量。并根据发明点1所得到的规律,提出根据1号探头的lut查找表即可推断出其余所有探头的lut查找表,总结规律将所有探头对应的lut查找表进行合并,得到一个单一的lut查找表,从而替代其他所有探头的lut查找表,大大节约了lut查找表的存储空间;基于提出的单一lut查找表,设计了光声图像重构时各探头lut查找表重建和光声图像重构算法。
74.根据经典反投影算法的实现过程,其实很容易分析出本发明的可行性及有益效果。在经典的反投影光声成像中,对于探测器上每一点去计算落在重构图像上的哪个像素点的过程实际是需要进行三步计算:
75.(1)根据该探测器采集的波形上该点的坐标值,计算出该点到超声源的距离r
*
,即存在1次乘法运算。
76.(2)计算重构图像区域的每一个像素点到该探测器的水平和垂直距离,即存在2次乘方计算。
77.(3)计算重构图像区域的每一个像素点到该探测器的直线距离r;即存在1次加法和开方运算。
78.(4)判断该直线距离r是否等于r
*
,即存在1次相等判断。
79.通过以上4步,经典的反投影算法才能判断出图像上的该点是否为探测器上的数据落点,即需要1次乘法 2次乘方 1次加法 1次开方 1次判断来完成。如果对每个点都这样计算,则重构过程需要对探测器上的每一点都要和重构图像上的像素点进行以上四步的计算,才能得到一个点在重构图像上的分布。假设采用216路探测器点阵,每个探测器可以采集778个点,则需要去做216*778个点的重构,每个点都需要在重构图像上进行上述4步步骤的计算,计算量可想而知,这严重影响了光声成像过程的速度。
80.本发明提出的运用lut查找表的方法对每个探测器上的每个点落在重构图像上的哪些像素点进行预处理操作,每路探头制作一个lut查找表,由于每路探头的采样频率是定值,因此同一列上的点画弧半径也为定值,即可发现每个查找表之间存在一定的规律,可由一个查找表快速地推算出其他探测器上的像素点的位置,使输入相应的地址即可查询到所
对应的探头电压幅值信号,从而对每一坐标点的幅值进行累加,最终重构出初始的双光压点图像并进行优化。此方法大大地简化了基于线性阵列超声探测器反投影光声图像重构过程,将所有的计算过程通过成像前预处理转化为成像过程中的查表过程,使得整个系统的计算量大大降低。同时通过简化lut查找表,将需要存储所有的探头lut查找表数据,简化为只存储一个lut查找表即可,极大地降低了系统存储需求。
81.为说明本发明可以简化计算和降低系统存储容量,下面对经典的反投影算法和基于单lut查找表的反投影算法进行比较。假设采用216路探测器点阵,每个探头可以采集778个点,则需要去做216*778个点的重构,每一个点的重构过程对比如下:
82.(1)对于经典算法,则需要判断重构图像上所有点是否和该点的距离是否一致,即216*778次的判断(每次判断的工作量为1次乘法 2次乘方 1次加法 1次开方 1次判断)来完成。
83.(2)对于单lut查找表算法,仅需要访问一次lut查找表,将所有相等距离的点坐标读出即可。
84.因此,完成整个探测器上数据点为216*778个数据卷积投影,对于经典算法,则重构需要(216*778)*(216*778)*(1次乘法 2次乘方 1次加法 1次开方 1次判断)的计算量;而对于单lut查找表算法,只需要216*778次查表即可。
85.而且本发明还提出采用单一lut查找表的方法,将线阵上所有探头的lut查找表特征进行合并简化,采用一个lut查找表即可实现。若阵列探头数为216,则存储容量缩小原来的为1/216。
86.总之,通过上面分析,本发明提出的方法,不但可以大大简化计算,而且也极大地降低系统存储容量。
87.为了验证本发明算法的正确性和有效性,发明人采用仿真模型对整个系统进行了仿真。仿真系统采用为216路超声探头阵列,两探头之间的间距为0.1mm,通过计算可以得出线性阵列探头宽度为2.15cm;超声波在生物组织的传播速度为v=1500m/s,采集频率50mhz,通过周期和频率的倒数关系可以算出t=20ns,可以得出一个周期的采集深度h(1)=0.03mm;探头的有效信号总时间为t=15.56us,通过计算可以得出采集时间点数的总数为778,探测器可以探测的生物组织垂直深度为2.334cm,。所以,光声图像的分辨率为216*778,成像生物组织的图像尺寸为2.334cm*2.15cm。和光声图像分辨率相对应,假设仿真的生物组织模型为网格也为216*778,有两个光吸收异常的点,在(110,82)、(174,224)坐标位置,如图4所示。仿真软件采用基于matlab的绿色光声成像软件k-wave对光声信号传播过程进行模拟,光声波在生物组织中的传播过程如图5所示,得到216路探测器上的超声信号。图6为1号探头上采集到的超声波形,图7为216个探头上采集的超声波对应的模拟数据。
88.在matlab软件中首先构建1号探头查找表,首先需要建立一个216*778的0矩阵,命名为a。定义变量y为探头序列号,取值范围为1-216,x为探头采集时间点数,取值范围为1-778,以1号探测器位置为原点建立直角坐标系,横坐标最小单位为一个周期的探测深度0.03mm,纵坐标最小单位为两个探头的相邻距离0.1mm,以1号探头探测器位置点为圆心,深度h(x)=0.03xmm为半径绘制n个圆弧,其中x取1,2
…
778,此类弧线与y=1,2
…
216其中任何一条直线发生相交都会产生一个交点。将产生一个交点的这一过程的所有信息记录入矩阵,作为1号探头的查找表,具体操作为:用来绘制圆弧半径h(x)中的x作为矩阵的第一位地
址,交点的纵坐标y作为矩阵的第二位地址,交点的横坐标通过四舍五入取整运算之后得到的数值做为矩阵的存储值写入,最终得到1号传感器lut查找表,经过matlab软件的设计及计算,结果如图8所示。例如:矩阵a(3,7)点的幅值为2,其含义为以1号传感器第7个时间点数的采集深度为半径(半径长度为0.21mm)画弧,与过三号传感器的水平直线y=3产生一交点,其交点坐标为(2,3);在反投影算法中的含义为1号探头第七个采集时间点的投影坐标为(2,3),位置为3号探头的第二个采集时间点位置处。需要注意:1号探头1-6位采集时间点画弧没有与y=3产生交点,此时将查找表的第三行的1-6位数据填充为0,即n个采集时间点画弧时,产生交点将交点的横坐标x写入,若不产生交点,则将0数据写入。
89.由于每一路探头所探测的时间步长与探测周期是相同的,因此每个采集时间点之间的间距也是相同的,即不同探测器的相同采集时间点画弧的半径相同。根据这一规律可以得出其余查找表,2号探头的lut查找表即为将一号探头整体向下平移一行且将1号探头的lut查找表第2行整体复制到2号探头lut查找表的第一行;以此类推,3号探头lut查找表即为将1号查找表向下平移两行,将1号查找表的2和3两行作为3号表的2和1两行,根据这一规律重构出一个总的lut查找表。
90.重构出一个总的lut查找表如图9所示,用excel软件制作出的单一lut查找表。当用此表从216行开始索引并向上进行循环,每次行数递减1并且同时取216*779位元素作为新查找表数据,例如:3号探头的lut查找表为从214行开始索引,取216*779位元素作为3号探头查找表。如此即可得到216个查找表。
91.图像重建部分利用查找表将传感器数据和投影点相对应起来,采用labview实现了基于单地址lut查找表的光声反投影成像的程序。首先,由单lut表推导得到216个查找表所对应的二维数组,再建立一个for循环,循环变量i定义为投影点的纵坐标y值;紧接着再建立一个for循环,循环变量i’定义为投影点的横坐标x值。根据投影点的坐标(x,y)此循环的目的即:通过查找对应投影点上的x值并且输出与之相对应的幅值横坐标x值;最终,得到幅值的横坐标x值后,上一章中,对数据进行预处理的阶段已经得到了幅值点的纵坐标y值,此时,再输入探头的幅值表格,即可查找到目标投影点所对应的幅值点的幅值大小,一共需要循环216张查找表,每张查找表都需要对每个点进行循环。
92.图像重建最后为将同一坐标所对应的幅值叠加起来进行成像。首先将216*778矩阵初始化,在for循环内添加移位寄存器,通过给矩阵中每一个点进行循环从而叠加幅值,经过全部的循坏后,可得到最终的重建图像如图10所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。