1.本发明涉及一种无人车,更具体的说是一种自动获取水稻叶面积指数无人车。
背景技术:
2.在水稻的种植过程中,需要对水稻的叶面积指数数据进行测量,传统的测量方式大多采用人工采集的方式,费时费力,利用无人车来进行采集时,传统的无人车不能调节轮距,这样对不同水稻田的适应性差,且功能单一,所以设计了一种自动获取水稻叶面积指数无人车。
技术实现要素:
3.本发明主要解决的技术问题是提供一种自动获取水稻叶面积指数无人车,无人车能够获取水稻叶面积指数,无人车能够适应不同的稻田,无人车能够喷洒农药,无人车能够让农药快速融合到水中。
4.为解决上述技术问题,本发明涉及一种取样设备,更具体的说是一种自动获取水稻叶面积指数无人车,包括转动获取机构、无人车架机构、农药注入机构,无人车能够获取水稻叶面积指数,无人车能够适应不同的稻田,无人车能够喷洒农药,无人车能够让农药快速融合到水中。
5.所述的转动获取机构与无人车架机构相连,无人车架机构与农药注入机构相连。
6.作为本技术方案的进一步优化,本发明一种自动获取水稻叶面积指数无人车所述的转动获取机构包括可转动滑轨、滑动支撑座、转动探头、滑动座、带轴凸齿轮、电机、限位座、方柱、第一弹簧、固定支撑座、限位盘、驱动电机、电机腔、丝杠、活动板、第二弹簧、滑槽、电机支撑、行走电机、带轴摩擦轮,可转动滑轨内滑动连接有滑动座,滑动座上方设有滑动支撑座,滑动支撑座上两侧转动连接有转动探头,带轴凸齿轮与可转动滑轨相连,可转动滑轨下端连接有电机,限位座可滑动的卡在带轴凸齿轮的两齿之间,限位座与方柱相连,方柱可滑动的穿过固定支撑座连接在限位盘上,第一弹簧套在方柱上,且两端分别连接在限位座和固定支撑座上,驱动电机设置在电机腔内,电机腔设置在滑动支撑座上,滑动支撑座上转动连接有丝杠,丝杠与活动板螺纹连接,活动板滑动连接在滑槽内,滑槽设置在滑动支撑座上,第二弹簧两端分别连接在活动板和电机支撑上,电机支撑滑动连接在滑槽内,电机支撑内设有行走电机,行走电机与带轴摩擦轮相连,带轴摩擦轮与电机支撑转动连接,带轴摩擦轮与可转动滑轨摩擦连接。
7.作为本技术方案的进一步优化,本发明一种自动获取水稻叶面积指数无人车所述的无人车架机构包括带齿行走轮、转动支撑、车箱、补充口、伺服电机、双向丝杠、轨道槽、农药腔、限位轨道、保护壳,带齿行走轮与转动支撑转动连接,转动支撑滑动连接在轨道槽内,轨道槽设置在车箱下端,车箱上端设有补充口,伺服电机连接在车箱下端,伺服电机与双向丝杠相连,双向丝杠与车箱转动连接,双向丝杠与转动支撑螺纹连接,车箱内设有农药腔,限位轨道连接在农药腔侧壁上,带轴凸齿轮与车箱转动连接,电机和固定支撑座均与车箱
底板内壁相连。
8.作为本技术方案的进一步优化,本发明一种自动获取水稻叶面积指数无人车所述的农药注入机构包括液压缸、活动壳、限位轴、带双侧凸起轴、带开孔轴、转动筒、中空轴、皮带轮、皮带、电机皮带轮、转动驱动电机、溢流槽、叶片、内置电机、带叶片活塞、进入口,液压缸的固定连接在车箱顶板上,液压缸的活动端与活动壳相连,活动壳滑动连接在限位轨道上,活动壳内设有内置电机相连,内置电机的转动端与活动壳转动连接,内置电机的转动端下端连接在限位轴上,限位轴与带双侧凸起轴相连,带双侧凸起轴与带开孔轴滑动连接,带开孔轴与转动筒转动连接,转动筒与中空轴相连,中空轴与皮带轮相连,皮带轮与电机皮带轮通过皮带相连,电机皮带轮与转动驱动电机相连,中空轴下端设有溢流槽和叶片,带叶片活塞与带双侧凸起轴相连,带叶片活塞与转动筒滑动连接,进入口设置在转动筒上,中空轴与车箱转动连接,转动驱动电机与保护壳相连,中空轴与保护壳转动连接。
9.作为本技术方案的进一步优化,本发明一种自动获取水稻叶面积指数无人车所述的补充口上设有塞子。
10.作为本技术方案的进一步优化,本发明一种自动获取水稻叶面积指数无人车所述的进入口内设有单向向转动筒内开启的单向阀,中空轴内设有单向向溢流槽开启的单向阀。
11.本发明一种自动获取水稻叶面积指数无人车的有益效果为:
12.本发明一种自动获取水稻叶面积指数无人车,无人车能够获取水稻叶面积指数,无人车能够适应不同的稻田,无人车能够喷洒农药,无人车能够让农药快速融合到水中。
附图说明
13.下面结合附图和具体实施方法对本发明做进一步详细的说明。
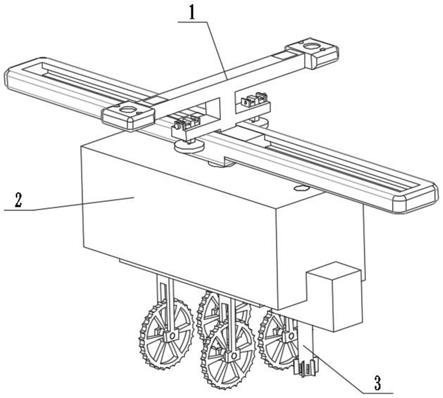
14.图1为本发明一种自动获取水稻叶面积指数无人车的结构示意图一。
15.图2为本发明一种自动获取水稻叶面积指数无人车的结构示意图二。
16.图3为本发明一种自动获取水稻叶面积指数无人车的结构示意图三。
17.图4为本发明一种自动获取水稻叶面积指数无人车的转动获取机构1的结构示意图一。
18.图5为本发明一种自动获取水稻叶面积指数无人车的转动获取机构1的结构示意图二。
19.图6为本发明一种自动获取水稻叶面积指数无人车的无人车架机构2的结构示意图一。
20.图7为本发明一种自动获取水稻叶面积指数无人车的无人车架机构2的结构示意图二。
21.图8为本发明一种自动获取水稻叶面积指数无人车的无人车架机构2的结构示意图三。
22.图9为本发明一种自动获取水稻叶面积指数无人车的农药注入机构3的结构示意图一。
23.图10为本发明一种自动获取水稻叶面积指数无人车的农药注入机构3的结构示意图二。
24.图中:转动获取机构1;可转动滑轨1-1;滑动支撑座1-2;转动探头1-3;滑动座1-4;带轴凸齿轮1-5;电机1-6;限位座1-7;方柱1-8;第一弹簧1-9;固定支撑座1-10;限位盘1-11;驱动电机1-12;电机腔1-13;丝杠1-14;活动板1-15;第二弹簧1-16;滑槽1-17;电机支撑1-18;行走电机1-19;带轴摩擦轮1-20;无人车架机构2;带齿行走轮2-1;转动支撑2-2;车箱2-3;补充口2-4;伺服电机2-5;双向丝杠2-6;轨道槽2-7;农药腔2-8;限位轨道2-9;保护壳2-10;农药注入机构3;液压缸3-1;活动壳3-2;限位轴3-3;带双侧凸起轴3-4;带开孔轴3-5;转动筒3-6;中空轴3-7;皮带轮3-8;皮带3-9;电机皮带轮3-10;转动驱动电机3-11;溢流槽3-12;叶片3-13;内置电机3-14;带叶片活塞3-15;进入口3-16。
具体实施方式
25.具体实施方式一:
26.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10说明本实施方式,无人车可以通过外挂车辆进行使用,根据水稻的间距来调整带齿行走轮2-1之间的距离,通过伺服电机2-5运转带动双向丝杠2-6进行转动,双向丝杠2-6转动会带动两侧转动支撑2-2相互靠近或者是相互远离,这样会带动带齿行走轮2-1相互靠近或者是远离,从而适应不同的水稻间距。
27.具体实施方式二:
28.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10说明本实施方式,本实施方式对实施方式一作进一步说明,外挂车辆带动无人车进行移动,在移动的过程中,转动探头1-3可以探测获取水稻叶面积指数,通过驱动电机1-12的驱动可以带动转动探头1-3转动,从而改变探测范围,通过行走电机1-19运转会带动带轴摩擦轮1-20进行转动,带轴摩擦轮1-20进行转动会通过与可转动滑轨1-1之间的摩擦力来带动滑动支撑座1-2进行移动,移动方向取决于行走电机1-19的运转方向,从而改变探测的位置,带轴摩擦轮1-20与可转动滑轨1-1的接触程度可以通过转动丝杠来调节,丝杠1-14转动会带动活动板1-15进行移动,从而改变对第二弹簧1-16的压缩程度,从而改变对电机支撑1-18的推动力,从而改变带轴摩擦轮1-20与可转动滑轨1-1的接触程度,通过电机1-6运转可以带动带轴凸齿轮1-5转动,带轴凸齿轮1-5会带动可转动滑轨1-1转动,从而进一步扩大探测的范围,每次电机1-6运转时带轴凸齿轮1-5转动会不断的通过转动力矩去推动限位座1-7,电机1-6停转后限位座1-7重新卡入带轴凸齿轮1-5两齿间,又可以起到一定的限位作用,没有外力的情况下可以保住带轴凸齿轮1-5固定位置,从而起到固定探测位置的作用。
29.具体实施方式三:
30.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10说明本实施方式,本实施方式对实施方式一作进一步说明,通过补充口2-4向农药腔2-8内加入农药,液压缸3-1带动活动壳3-2进行上下往复运动,活动壳3-2会带动带双侧凸起轴3-4进行上下往复运动,带双侧凸起轴3-4会带动带叶片活塞3-15进行上下往复运动的同时使得内置电机3-14带动带双侧凸起轴3-4转动,带双侧凸起轴3-4会带动带叶片活塞3-15转动,这样带叶片活塞3-15的上下往复运动时,引起转动筒3-6内压差变化,将农药腔2-8内的农药从进入口3-16吸入转动筒3-6内被带叶片活塞3-15转动加压后从溢流槽3-12输出,转动加压的过程中会对农药进行搅拌均匀,同时转动驱动电机3-11带动电机皮带轮3-10转动,电机皮带轮3-10会通过
皮带3-9带动皮带轮3-8转动,皮带轮3-8会带动中空轴3-7转动,中空轴3-7会带动叶片3-13转动,从而将农药向四周转动推开,便于混合。
31.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。