1.本发明涉及移动视觉机器人技术领域,尤其涉及一种面向复杂环境的新型移动视觉机器人。
背景技术:
2.随着科技的发展,机器人也越来越多的出现在我们生活当中。运动模块作为移动机器人的核心部件,其运动模式的设计限定了机器人应用范围。轮式、履带式、步行式作为现有移动机器人常见的三种运动模式,在不同的路况展现出自身优势,但在复杂多变的现实环境下的路况,对单一运动模式的机器人极具挑战;同时,现有移动在面对复杂环境缺乏能够对环境进行分析的视觉功能。因此,设计具备视觉相机且能分析泥泞、雪地和陡峭等复杂多变环境并能根据环境灵活切换机器人的运动模式的新型移动机器人极具现实意义,我们针对这一问题设计出了一种面向复杂环境的新型移动视觉机器人。
技术实现要素:
3.为此,本发明提供一种面向复杂环境的新型移动视觉机器人,用以克服现有技术中机器人无法在复杂多变的路况上切换机器人的运动模式以进行行走的问题。
4.为实现上述目的,本发明提供一种面向复杂环境的新型移动视觉机器人,包括:
5.底板(4);
6.若干运动模式调节单元(5),其分别设置在所述底板(4)顶部的对应位置,用以切换移动单元的运行方式以更改机器人的运动模式;
7.移动单元,其分别与各所述运动模式调节单元(5)相连,用以控制机器人行走,移动单元包括若干第一移动组件(1)以及若干第二移动组件(2);
8.辅助单元(3),其包括若干个辅助组件,各辅助组件分别设置在所述底板(4)侧壁的对应位置,用以在所述移动单元控制机器人行走时对移动单元进行辅助;
9.反馈单元(6),其设置在所述底板(4)顶部,用以在机器人移动时反馈机器人状态;
10.视觉检测单元(7),其设置在所述底板(4)顶部,用以在机器人移动时实时检测路况信息。
11.进一步地,各所述第一移动组件(1)分别设置在对应的所述运动模式调节单元(5)底部以控制所述机器人行走。
12.进一步地,对于单个所述第一移动组件(1),包括:
13.固定架(14),其与所述运动模式调节单元(5)相连,用以固定第一移动组件(1)中的部件;
14.第一驱动装置,其设置在所述固定架(14)顶部,包括第一驱动电机(12)和皮带轮(11);
15.麦克纳姆轮(15),其设置在所述固定架(14)底部,麦克纳姆轮(15)贯穿(14)且在固定架(14)外壁设置有从动轮,从动轮与麦克纳姆轮(15)同心且从动轮与所述皮带轮通过
皮带相连,用以接收所述第一驱动电机(12)输出的动力。
16.进一步地,各所述运动模式调节单元(5)分别与对应的所述第一移动组件(1),用以调节所述麦克纳姆轮(15)与所述底板(4)的相对高度以切换机器人的运动模式。
17.进一步地,对于单个所述运动模式调节单元(5),包括:
18.定位架(56),其与所述底板(4)相连,用以固定运动模式调节单元(5)中的部件;
19.若干导杆(54),其分别贯穿所述定位架(56)并分别与所述固定架(14)固定连接,用以在运动模式调节单元(5)移动第一移动组件(1)时对第一移动组件(1)进行导向;
20.第四驱动电机(51),其设置在所述定位架(56)上,在第四驱动电机(51)的输出端设有驱动轮(52),驱动轮(52)设置在定位架(56)上并与第四驱动电机(51)通过皮带相连;
21.丝杠(53),其依次贯穿所述定位架(56)以及所述驱动轮(52),用以在驱动轮(52)转动时上升或下降以调节所述麦克纳姆轮(15)与所述底板(4)的相对高度。
22.进一步地,对于单个所述第二移动组件(2),包括:
23.支撑板(28),其与所述底板(4)的底部相连,用以固定所述第二移动组件(2)中的部件;
24.第二驱动装置,其设置在所述底板(4)的顶部,包括第二驱动电机(21)和齿轮(23);
25.中心轴(24),其贯穿所述支撑板(28)与所述底板(4)相连,用以承载履带轮(25),中心轴(24)靠近所述支撑板(28)的一侧设置有第一从动轮,用以接收所述第二驱动电机(21)输出的动力;
26.履带轮(25),其设置在所述中心轴(24)上,用以驱动所述第二移动组件行走。
27.进一步地,对于单个所述辅助组件,包括:
28.侧板(34),其设置在所述底板(4)侧壁,用以固定所述辅助组件;
29.第三驱动电机(30),其与所述侧板(34)相连并设置在固定轴上,用以提供动力;
30.第二从动轮(31),其与所述第三驱动电机(30)相连,用以接收所述所述第三驱动电机(30)输出的动力。
31.进一步地,所述固定轴与所述中心轴(24)同轴心。
32.进一步地,所述反馈单元(6)为用以反馈所述机器人状态的反馈灯。
33.进一步地,所述视觉检测单元(7)为用以检测所述机器人当前移动路况的视觉相机。。
34.与现有技术相比,本发明的有益效果在于,本发明移动视觉机器人中设置有视觉检测单元和运动模式调节单元,在所述机器人进行行走时,通过视觉检测单元实时检测所述机器人移动路况并可以分析复杂的路况,通过视觉相机的分析以合理的切换所述机器人的运动模式,可以使所述机器人在不同的路况下进行行走,适用于平坦、柔性和陡峭等多种路况,可应用于救援、军事等多种领域。
附图说明
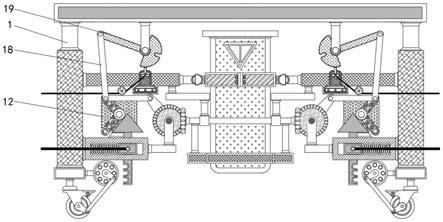
35.图1为本发明所述面向复杂环境的新型移动视觉机器人的结构示意图;
36.图2为本发明所述面向复杂环境的新型移动视觉机器人的第一移动组件结构示意图;
37.图3为本发明所述面向复杂环境的新型移动视觉机器人的第二移动组件结构示意图;
38.图4为本发明所述面向复杂环境的新型移动视觉机器人的辅助组件结构示意图。
39.附图标记:1-第一移动组件,2-第二移动组件,3-辅助单元,4-底板,5-运动模式调节单元,6-反馈单元,7-视觉检测单元,11-皮带轮,12-第一驱动电机,13-第一皮带,14-固定架,15-麦克纳姆轮,21-第二驱动电机,22-链条,23-齿轮,24-中心轴,25-履带轮,26-联轴器,27-差速器,28-支撑板,30-第三驱动电机,31-第二从动轮,32-第二皮带,33-辅助轮,34-侧板,51-第四驱动电机,52-驱动轮,53-丝杠,54-导杆,55-轴套,56-定位架。
具体实施方式
40.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
41.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
42.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
43.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
44.请参阅图1所示,为本发明实施例提供的面向复杂环境的新型移动视觉机器人的结构示意图,包括:
45.底板4;
46.若干运动模式调节单元5,其分别设置在所述底板4顶部的对应位置,用以切换移动单元的运行方式以更改机器人的运动模式;
47.移动单元,其分别与各所述运动模式调节单元5相连,用以控制机器人行走,移动单元包括若干第一移动组件1以及若干第二移动组件2;
48.辅助单元3,其包括若干个辅助组件,各辅助组件分别设置在所述底板4侧壁的对应位置,用以在所述移动单元控制机器人行走时对移动单元进行辅助;
49.反馈单元6,其设置在所述底板4顶部,用以在机器人移动时反馈机器人状态;
50.视觉检测单元7,其设置在所述底板4顶部,用以在机器人移动时实时检测路况信息。
51.具体而言,当机器人进行行走时,视觉检测单元7实时检测路况信息并根据平坦、柔性、陡峭等路况选择合理的运动模式以使机器人可以在复杂路况下行走。
52.请继续参阅图1所示,反馈单元6设置在所述底板4的顶部,用以对车身自身故障状况或是环境危险警报进行视觉反馈,本领域技术人员可以理解的是,反馈单元可以为灯,也
可以为其他可以反馈机器人状态的装置,例如,语音播报装置,只要可以能够反馈机器人状态即可。本实施例中,反馈单元优选的为反馈灯,使用者根据反馈灯的颜色即可判断机器人的状态,当反馈灯显示绿色时表示当前车辆和环境正常;当反馈灯显示绿色时黄色表示车辆自身存在故障;当反馈灯显示绿色时红色表示环境异常。
53.请继续参阅图1所示,视觉检测单元7可旋转的设置在所述底板4的顶部,用以实时检测当前机器人行走路况信息并根据路况信息合理的切换机器人的运动模式。优选的,视觉检测单元为视觉相机,本领域技术人员可以理解的是,视觉检测单元也可以为高清摄像头或其他可以实时检测当前机器人行走路况信息的其他装置,只要能满足实时检测当前机器人行走路况信息即可。所述视觉相机能分析泥泞、雪地和陡峭等复杂多变环境。
54.请继续参阅图2所示,为本发明实施例提供的面向复杂环境的新型移动视觉机器人的第一移动组件1结构示意图,所述移动组件包括第一移动组件1和第二移动组件2两个部分,其中,第一移动组件1的数量为4个并设置在所述底板4底部的四周,包括:固定架14,其与所述运动模式调节单元5相连,用以固定第一移动组件1中的部件;第一驱动装置,其设置在所述固定架14顶部,包括第一驱动电机12和皮带轮11;麦克纳姆轮15,其设置在所述固定架14底部,麦克纳姆轮15贯穿14且在固定架14外壁设置有从动轮,从动轮与麦克纳姆轮15同心且从动轮与所述皮带轮11通过皮带相连,用以接收所述第一驱动电机12输出的动力。在使用第一移动组件进行行走时,第一驱动电机12控制皮带轮11通过皮带连接麦克纳姆轮15以驱动麦克纳姆轮转动以控制机器人移动。
55.请继续参阅图2所示,所述运动模式调节单元5通过底板与所述第一移动组件1相连并相对的设置在所述底板4顶部的四周,所述运动模式调节单元5与所述第一移动组件1的数量相同,用以改变所述麦克纳姆轮15的升降以切换机器人的运动模式,所述运动模式调节单元5包括:定位架56,其与所述底板4相连,用以固定运动模式调节单元5中的部件;若干导杆54,其分别贯穿所述定位架56并分别与所述固定架14固定连接,用以在运动模式调节单元5移动第一移动组件1时对第一移动组件1进行导向;第四驱动电机51,其设置在所述定位架56上,在第四驱动电机51的输出端设有驱动轮52,驱动轮52设置在定位架56上并与第四驱动电机51通过皮带相连;丝杠53,其依次贯穿所述定位架56以及所述驱动轮52,用以在驱动轮52转动时上升或下降以调节所述麦克纳姆轮15与所述底板4的相对高度。本领域技术人员可以理解的是,导杆54的数量可以多个,只要能满足固定效果即可。本实施例中,优选的将每个运动模式调节单元中导杆54的数量设置为两个。
56.请继续参阅图3所示,为本发明实施例提供的面向复杂环境的新型移动视觉机器人的第二移动组件结构示意图,所述第二移动组件2设置为两个,包括:支撑板28,其与所述底板4的底部相连,用以固定所述第二移动组件2中的部件;第二驱动装置,其设置在所述底板4的顶部,包括第二驱动电机21和齿轮23;中心轴24,其贯穿所述支撑板28与所述底板4相连,用以承载履带轮,中心轴24靠近所述支撑板28的一侧设置有第一从动轮,用以接收所述第二驱动电机21输出的动力;履带轮25,其设置在所述中心轴24上,用以驱动所述第二移动组件行走。
57.请继续参阅图3所示,所述两个第二移动组件中履带轮25之间的中心轴通过联轴器26与差速器27相连以调节所述履带轮25之间的移动速度,差速器27固定于底板中下侧。
58.请继续参阅图3所示,所述第二驱动装置设置在所述底板4的顶部,包括:第二驱动
电机21和齿轮23,当使用第二移动组件进行行走时,第二驱动电机21控制齿轮23通过链条22驱动所述第一从动轮旋转,所述第一从动轮用以控制所述中心轴24旋转驱动所述履带轮25旋转以控制机器人进行行走。
59.请继续参阅图4所示,为本发明实施例提供的面向复杂环境的新型移动视觉机器人的辅助组件结构示意图,所述辅助组件设置为4个并设置所述底板侧壁,用以辅助机器人进行行走,所述辅助组件,包括:侧板34,其设置在所述底板4侧壁,用以固定所述辅助组件;第三驱动电机30,其与所述侧板34相连并设置在固定轴上,用以提供动力;第二从动轮31,其与所述第三驱动电机30相连,用以接收所述所述第三驱动电机30输出的动力。请继续参阅图4所示,所述第三驱动电机30与所述第二从动轮31之间还设置有若干用以传递动力的辅助轮33,所述固定轴设置在所述底板4的侧壁且与所述中心轴24同轴心。当所述辅助组件工作时,所述第三驱动电机30一方面控制所述辅助组件绕所述固定轴旋转,从而使所述辅助组件将机器人抬高,另一方面通过第二皮带32控制所述第二从动轮31旋转,从而在所述第二从动轮接触地面时使机器人翻越障碍物以辅助机器人行走。
60.具体而言,当机器人进行行走时,所述视觉检测单元检测当前路况信息,并由反馈单元给出反馈信号,所述视觉检测单元通过对平坦、柔性、陡峭等路况的判断以控制所述运动模式调节单元合理切换运动模式;所述运动模式调节单元过通过对所述麦克纳姆轮的升降控制以切换运动模式,当麦克纳姆轮降至地面时启动公路模式,其上升时进入泥地模式,由履带轮组件作为运动组件,其中所述辅助组件作为越障辅助机构可在公路模式或泥地模式翻越障碍。
61.具体而言,本发明移动视觉机器人中设置有视觉检测单元和运动模式调节单元,在所述机器人进行行走时,通过视觉检测单元实时检测所述机器人移动路况并可以分析复杂的路况,通过视觉相机的分析以合理的切换所述机器人的运动模式,可以使所述机器人在不同的路况下进行行走。
62.具体而言,本发明所设计的面向复杂环境的新型视觉移动机器人能够根据视觉相机结合视觉算法分析现实环境路况,并根据现实环境路况合理的切换运动模式以使机器人可以在不同的路况上进行行走,适用于平坦、柔性和陡峭等多种路况,可应用于救援、军事等多种领域。
63.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
64.以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。