1.本发明属于工业设计制造技术领域,更具体地说,本发明涉及一种传感器拆装装置。
背景技术:
2.近年来,随着监测技术的日益发展,越来越多的工业设备开始采用多样化的监测系统,以实现设备状态的监测。作为监测系统前端的一种重要设备,传感器广泛应用于各种场合。
3.对于一些特殊的使用场合,如在高温、高压、高辐照等恶劣环境下,为了确保设备状态监测的准确性和可靠性,工作一定的时间后,传感器需要进行定期更换和维护。例如,在核电技术领域,装有磁吸式传感器的压力容器位于设备支承平台的设备坑内,压力容器外壁通过设备支承键与设备支承平台上的支座配合连接,磁吸式传感器安装于压力容器的底部,压力容器与设备支承平台的设备坑之间的距离狭小,受限于恶劣的工作环境和狭小的操作空间,人员无法通过狭小通道执行传感器的拆装和维修。
4.有鉴于此,确有必要提供一种传感器拆装装置,以实现在狭小的空间下装拆传感器。
技术实现要素:
5.本发明的目的在于:克服现有技术中的至少一个缺陷,提供一种传感器拆装装置,以实现在狭小的空间下拆装传感器。
6.为了实现上述目的,本发明提供了一种传感器拆装装置,其包括:
7.驱动调整装置;
8.连接杆,连接于所述驱动调整装置上,所述驱动调整装置驱动所述连接杆调整位置;以及
9.拆装装置,连接于所述连接杆上,所述拆装装置包括推拉气缸、夹紧气缸和夹爪,所述推拉气缸推动所述拆装装置移动,所述夹紧气缸驱动所述夹爪拆装传感器。
10.根据本发明传感器拆装装置的一个实施方式,所述连接杆包括连接所述驱动调整装置上的直杆和连接所述直杆的铰链杆,所述铰链杆包括通过铰链连接的多个连接臂,所述连接臂的两侧设有滚轮。
11.根据本发明传感器拆装装置的一个实施方式,所述所述直杆设有多个长方管,所述长方管的一端焊接有双层带孔焊耳,所述长方管的另一端焊接有单层带孔焊耳,所述长方管的单层焊耳插入相邻所述长方管的双层焊耳内并通过销轴连接。
12.根据本发明传感器拆装装置的一个实施方式,所述长方管的两侧面对称设有翼板,所述翼板上安装有万向轮。
13.根据本发明传感器拆装装置的一个实施方式,所述拆装装置上设有摄像装置。
14.根据本发明传感器拆装装置的一个实施方式,所述连接杆与所述拆装装置之间设
有弯曲臂,所述弯曲臂上设有驱动电机,所述驱动电机驱动所述弯曲臂调整角度。
15.根据本发明传感器拆装装置的一个实施方式,所述弯曲臂包括多节支架,对应所述多节支架设有多个驱动电机,所述驱动电机驱动所述多节支架相对调整角度。
16.根据本发明传感器拆装装置的一个实施方式,所述弯曲臂与所述推拉气缸之间设有隔磁板。
17.根据本发明传感器拆装装置的一个实施方式,所述传感器拆装装置设有为所述拆装装置提供动力的驱动机构,所述驱动机构包括气源泵和电气控制箱,所述电气控制箱上设有气路接口,所述气路接口通过连接管路与所述驱动电机、推拉气缸和夹紧气缸的连接口连接。
18.根据本发明传感器拆装装置的一个实施方式,所述驱动调整装置包括第一支承平台、安装在所述第一支承平台上的第二支承平台、安装在所述第二支承平台上的第三支承平台、所述第一支承平台上设有第一丝杠和第一滑轨,所述第二支承平台设有第一螺母,通过所述第一螺母与第一丝杠配合,所述第二支承平台可沿着所述第一滑轨x方向移动,所述第二支承平台设有第二丝杠和垂直于所述第一滑轨的第二滑轨,所述第三支承平台设有第二螺母,通过所述第二螺母与第二丝杠配合,所述第三支承平台可沿着所述第二滑轨y方向的移动,所述第三支承平台上固定有回转支承,所述回转支承的顶部焊接有第三滑轨,所述第三滑轨上套设有第三丝杠和滑块,所述连接杆连接于所述滑块上,所述滑块设有内螺纹,通过内螺纹与第三丝杠配合,所述滑块沿着所述第三滑轨呈z轴上下移动。
19.相对于现有技术,本发明传感器拆装装置具有以下优点:
20.通过驱动调整装置驱动连接杆和设置于连接杆上的弯曲臂调整位置,通过推拉气缸推动设置于弯曲臂末端的拆装装置移动,并通过夹紧气缸驱动拆装装置实现传感器拆装,连接杆的长度可根据需要调整,因此能够满足长距离、窄间隙位置处的传感器拆装需求。
附图说明
21.下面结合附图和具体实施方式,对本发明传感器拆装装置及其技术效果进行详细说明,其中:
22.图1为本发明传感器拆装装置在设备支承平台上的安装示意图。
23.图2为图1所示设备支承平台的剖视示意图。
24.图3为图2所示传感器拆装装置的局部放大示意图。
25.图4和图5为本发明传感器拆装装置中,连接杆的结构示意图。
26.图6和图7为本发明传感器拆装装置中,弯曲臂的结构示意图。
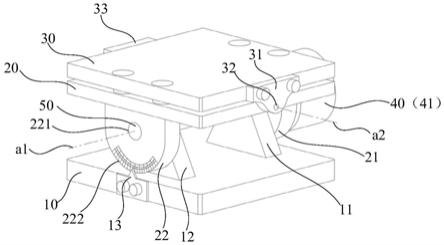
27.图8为本发明传感器拆装装置中,驱动调整装置的结构示意图。
28.其中:10
‑‑
驱动装置;100
‑‑
气源泵;102
‑‑
电气控制箱;20
‑‑
连接杆;200
‑‑
直杆;202
‑‑
双层带孔焊耳;204
‑‑
单层带孔焊耳;206
‑‑
翼板;207
‑‑
万向轮;208
‑‑
铰链杆;210
‑‑
连接臂;212
‑‑
合页螺栓;214
‑‑
滚轮;216
‑‑
弯曲臂;218
‑‑
第一节支架;220
‑‑
第一驱动电机;222
‑‑
齿轮变速箱;224
‑‑
第二节支架;225
‑‑
第二驱动电机;226
‑‑
轴套;227
‑‑
u型板;228
‑‑
第三节支架;230
‑‑
第三驱动电机;232
‑‑
第四节支架;234
‑‑
隔磁板;30
‑‑
拆装装置;300
‑‑
推拉气缸;302
‑‑
夹紧气缸;304
‑‑
夹爪;306
‑‑
导向杆;40
‑‑
驱动调整装置;400
‑‑
第一支承平
台;402
‑‑
第一滑轨;404
‑‑
第一手柄;406
‑‑
第二支承平台;408
‑‑
第二滑轨;409
‑‑
第二手柄;410
‑‑
第三支承平台;412
‑‑
第三滑轨;414
‑‑
回转支承;416
‑‑
滑块;418
‑‑
调整板;420
‑‑
第三手柄。
具体实施方式
29.为了使本发明的发明目的、技术方案及其技术效果更加清晰,以下结合附图和具体实施方式,对本发明进行进一步详细说明。应当理解的是,本说明书中描述的具体实施方式仅仅是为了解释本发明,并非为了限定本发明。
30.请参照图1和图2所示,本发明传感器拆装装置包括:
31.驱动调整装置40;
32.连接杆20,连接于驱动调整装置40上,驱动调整装置40驱动连接杆20调整位置;以及
33.拆装装置30,连接于连接杆20上,包括推拉气缸300、夹紧气缸302和夹爪304,推拉气缸300推动夹紧气缸302移动位置,夹紧气缸302驱动夹爪304拆装传感器。
34.请参照图1所示,驱动机构10为拆装装置30提供动力,包括气源泵100和连接气源泵100的电气控制箱102。气源泵100作为拆装装置40的动力源,自带储气罐,根据压力大小自行地将外界空气不断地进行压缩,并储存在储气罐中,储存的气体压力在0.8-1.2bar之间,工作时需外接220v电源。气源泵100的下部安装有导向轮,可根据空间的大小进行小范围的移动。
35.电气控制箱102上设有控制按钮,通过按钮对气路进行相应控制。电气控制箱102上设有气路接口,气路接口通过连接管路与推拉气缸300和夹紧气缸302的连接口连接。
36.请一并参照图3至图5所示,连接杆20包括位于设备支承平台上的直杆200,以及深入压力容器与支承平台设备坑间隙内的铰链杆208。连接杆208的主体部分长度可达4000mm,杆横截面宽为60.5mm,能够满足长距离、窄间隙(《90mm)位置处的磁吸式传感器拆装需求。直杆200由多个金属长方管结构连接而成,例如,请特别参照图4所示,长方管的一端焊接有双层带孔焊耳202,长方管的另一端焊接有单层带孔焊耳204,连接时,可将长方管的单层焊耳插入长方管的双层焊耳内,在对中孔内插入销轴连接。通过改变焊耳相对于长方管端部的位置,可实现两长方管的垂直连接。长方管侧面隔一段距离焊接对称翼板206,翼板206呈矩形且开设有螺纹孔(未图示),带有螺柱结构的万向轮207连接在螺纹孔内,可支承长方管离开支承台平面并在支承平台上自由移动。靠近压力容器处的连接杆20的两端设有固定翼板,翼板上设有通孔,通过螺栓固定在压力容器支承台上。
37.请特别参照图3所示,铰链杆208可以自由弯曲,其包括多段连接臂210,连接臂210之间通过重型合页螺栓212连接,连接臂210与连接臂210之间可沿合页轴转动,连接臂210两侧对称安装有滚轮214,滚轮214由尼龙材质制成。在铰链杆208下放至间隙内时,滚轮214可执行导向功能,避免连接杆20划伤压力容器壁和设备坑内表面。
38.请参照图6和图7所示,连接杆20与拆装装置30之间设有弯曲臂216,弯曲壁216为铝合金制多节支架结构。请特别参照图6所示,弯曲臂216为多节支架结构,第一节支架218的端部焊接有方形法兰(未标注),方形法兰上开有螺栓通孔,与连接杆20末端的方形法兰孔配合,并通过螺栓机械连接。支架板上设有第一驱动电机220,第一驱动电机220的连接轴
与微型齿轮变速箱222连接,齿轮变速箱222通过螺栓固定至第一节支架218上,齿轮变速箱222伸出的驱动轴(未标注)与第二节支架224上的轴套226连接,驱动轴与第一节支架218的夹持板之间设置有轴套结构。电气控制箱102控制第一驱动电机220,使得驱动轴定角度转动,可使第一节支架218与第二节支架224之间发生角度弯曲,弯曲臂216的第二节支架224的尾部为u型板227,u型板227两侧开孔与第二驱动电机225连接,第二驱动电机225另外一侧的驱动轴直接与第三节支架228上的u型板连接,电气控制箱102控制第二驱动电机225时,第二驱动轴定角度转动,可实现第二节支架224与第三节支架228之间发生角度弯曲。第三节支架228由矩形金属框架螺栓连接拼装而成,末端开孔与第三驱动电机230相连,第三驱动电机230的驱动轴与第四节支架232的u型板连接,第四节支架232的u型板的另一侧开螺栓通孔,与拆装装置30螺栓连接。
39.拆装装置30包括推拉气缸300、夹紧气缸302和夹爪304,推拉气缸300的端部通过螺栓与弯曲臂216的第四节支架232连接,推拉气缸300内的导向杆306端部穿过l型板并与其螺纹连接固定,l型板的另一端上开有螺栓通孔,夹紧气缸302通过螺栓固定在l型板的另一侧,推拉气缸300的导向杆306向外顶出的同时可带动夹紧气缸302一起移动。夹紧气缸302的端部安装夹爪移动滑轨(未标注),夹爪304与夹紧气缸302内的导向杆相连,气缸进气时,导向杆带动两瓣夹爪延移动滑轨对向移动为夹紧操作,反向移动为释放操作。需要说明的是,夹爪304提供的夹持力能够克服传感器磁座的吸附力,能在较小空间内的实现传感器拆装。
40.实际拆装过程中,将铰链杆208下放至压力容器与设备坑壁间隙中指定位置后,通过第一驱动电机200、第二驱动电机220、第三驱动电机230驱动第一节支架218、第二节支架224、第三节支架228、第四节支架232弯曲至指定角度,将拆装装置30摆动至传感器附近位置,推拉气缸300推动夹紧气缸302靠近传感器,通过操控面板操控夹紧气缸302对传感器进行夹紧。弯曲臂216上喷涂有环氧树脂,可防止弯曲臂216金属尖锐部分对导流板产生破坏。
41.请参照图7所示,根据本发明的一个实施方式,在第四节支架232的u型板上端面上开有固定隔磁板螺纹孔,隔磁板234上对应位置开螺栓通孔,通过螺栓将隔磁板234固定在推拉气缸300上部,将推拉气缸300、夹紧气缸302、夹爪304与压力容器壁隔开,隔磁板234为尼龙材质,隔磁板234可防止取下的传感器再次被吸附在压力容器的表面。
42.根据本发明的一个实施方式,拆装装置30上设有摄像装置,摄像装置设有4个摄像头,4个摄像头分别通过管箍固定在拆装装置30的侧面,各个摄像头的连接线通过软线缆和平台上方的电源箱进行连接,实时监测各个弯曲位置的情况以及夹紧气缸302与传感器的相对位置,并反馈至平台的显示器上,操作过程可视,便于操作人员控制。
43.请参照图8所示,驱动调整装置40主要包括安装在设备支撑平台上的第一支承平台400、设置在第一支承平台400上的第一滑轨402、安装在第一支承平台400上的第二支承平台406、设置在第二支承平台406上的第二滑轨408、安装在第二支承平台406上的第三支承平台410,以及设置在第三支承平台410上的第三滑轨412。第一滑轨402固定在第一支承平台400上,包括两条圆柱形轨道,第一手柄404与固定在第一支承平台400上的第一丝杠(未图示)相连。第二滑轨408固定在第二支承平台406上,第二支承平台406下部槽内固定有第一螺母结构(未图示),第一螺母与第一丝杠配合,在旋转第一手柄404时,第二支承平台406可沿着第一滑轨402实现x方向的移动。第二滑轨408的轨道方向与第一滑轨402呈90
°
设
置,第二手柄409与第二支承平台406上的第二丝杠连接,第三支承平台410的下部槽内固定有第二螺母结构,第二螺母与第二丝杠配合,在旋转第二手柄409时,第三支承平台410可沿着第二滑轨408实现y方向移动,第三支承平台410上固定有回转支承414,回转支承414可绕其中心轴z旋转,回转支承414的顶部焊接有方形支承柱和第三滑轨412,滑块416为矩形结构,开有2个导向孔,套入第三滑轨412内,滑块416与l型调整板418螺栓连接,滑块416中心位置开孔,第三丝杠连接第三手柄420穿过滑块416的中心孔,滑块416的中心孔内为内螺纹结构与第三丝杠配合,当旋转第三手柄420时,滑块416将沿着第三滑轨412呈z轴上下移动,因此,通过转动第一手柄404、第二手柄409、第三手柄420可实现l型调整板418随第二支承平台406在x方向移动、随第三支承平台410在y方形移动,随转动回转支承414绕z轴转动,随滑块416沿着z轴方向上下移动。
44.l型调整板418下端焊接矩形法兰,矩形法兰上开有4个长圆孔,与支承平台上的连接杆20的端面法兰螺栓连接,因此,通过驱动调整装置40的驱动可实现整个拆装装置30在压力容器的底部位置整体移动。驱动调整装置40的参数表如下所示。通常是在拆装装置30已经安置在压力容器底部以后,再对驱动装置40进行调整,能够对抓取杆件整体进行x、y和z三个方向进行调整,各个方向的调整距离至少100mm。
45.表1驱动调整装置参数表
[0046][0047][0048]
根据本发明传感器拆装装置的一个实施方式,可采用动力控制系统控制拆装装置30装拆传感器,动力控制系统包括供电系统、拆卸装置控制系统、检测系统和执行系统,供电系统接受外部提供给传感器拆装装置的总电源,再经由直流电源为控制系统、检测系统和执行系统来提供供电电源。
[0049]
拆卸装置控制系统包括断路器、plc、触摸屏和继电器,触摸屏通过lan接口连接带有网络接口的内窥镜。根据本发明传感器拆装装置的一个实施方式,plc选用台达品牌的ss系统主机(di8-do6,继电器型输出)和ss系统扩展(di8-do8,继电器型输出),触摸屏选用上海速控的7寸高彩屏,使用lan接口连接带有网络接口的内窥镜,通过plc编写逻辑程序,在触摸屏上固化好逻辑程序,再结合触屏指令,实现传感器的安装和拆卸。
[0050]
根据本发明传感器拆装装置的一个实施方式,检测系统包括气缸上的磁开和内窥镜,磁开接通电源,当气缸动作到位或动作收回时,磁开被感应,将信号传递给plc,经过逻
辑判断后在触摸屏上显示动作步骤。
[0051]
执行系统包括气缸、离合器和电磁铁,压缩空气经由电磁阀驱动气缸动作,离合器和电磁铁由转换后的dc电源驱动,实现离合和吸合动作。
[0052]
以下结合附图,详细说明利用本发明传感器拆装装置拆卸传感器的过程:
[0053]
从气源泵100出来的气体统一通过电气控制箱102,利用电气控制箱102上的控制按钮对气路进行相应的控制。电气控制箱102上设有气路接口,气路接口通过连接管路与弯曲臂驱动气缸9、推拉气缸300和夹紧气缸302的连接口连接。
[0054]
在支承平台上固定好驱动调整装置40后,将支承平台上连接杆部分连接完毕,将铰链杆208沿压力容器边缘缝隙下放,通过摄像装置显示的成像观测拆装装置30的实时位置。当连接杆20安装到合适位置以后,接通第一驱动电机220,第二节支架224弯曲。通过摄像装置显示成像,接通第二驱动电机225,第三节支架228弯曲。期间如果位置需要微调的话,可以通过调整驱动调整装置40的第一手柄404、第二手柄409、第三手柄420,可以对拆装装置30整体x、y、z方向平移,以及沿z轴旋转。
[0055]
接通推拉气缸300、夹紧气缸302气路,再断开推拉气缸300,控制夹爪304将传感器从固定底座上面取下来。
[0056]
安装传感器的操作与上述的步骤相反。
[0057]
结合以上对本发明实施方式的详细描述可以看出,相对于现有技术,本发明传感器拆装装置具有以下优点:
[0058]
通过驱动调整装置40驱动连接杆20和设置于连接杆20上的弯曲臂216调整位置,通过推拉气缸300推动设置于弯曲臂216末端的拆装装置30移动,并通过夹紧气缸302驱动夹爪304实现传感器拆装,连接杆20的长度可根据需要调整,因此能够满足长距离、窄间隙位置处的传感器拆装需求。
[0059]
根据上述原理,本发明还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。