1.本发明属于机器人机械爪技术领域,具体涉及一种应用于水表外壳大口加工的柴孚六轴机器人机械爪。
背景技术:
2.水表外壳大口加工,由于特定的加工流程,一直使用数控16车床加工,一名操作工使用两台,日产量在750只左右!手工操作放件取货,劳动强度大,生产效率低下!近几年,由于车床加工的特性合适工人很难招收,每年都存在人员流失和缺失操作工!自2020年05月份开始,公司开始研究机器人加工自动化领域,使原来陈旧生产工艺进行升级!利用柴孚sf10-k1650型六轴机器人动作灵敏,位置准确,性能稳定等有利条件!充分运用到水表外壳大口加工中,由公司技改部门自行制作工装夹具,现在一名操作工能够轻松操作9台车床,一名工人日产量在2500只左右,操控能力提高450%,产量提高333%!大大降低人员使用量,提高用人质量,提升加工能力,降低生产成本。
3.由于发现在放货加工的时候,位置深浅有偏差,易产生修货和台薄报废,因此还存在机械爪夹持效果不佳的问题。
技术实现要素:
4.本发明的目的在于提供一种应用于水表外壳大口加工的柴孚六轴机器人机械爪,旨在解决现有技术中的机械爪夹持效果不佳的问题。
5.为实现上述目的,本发明提供如下技术方案:一种应用于水表外壳大口加工的柴孚六轴机器人机械爪,包括:底座,所述底座的上端固定连接有支板;转向机构,所述转向机构包括第一电机、第一转杆、第一锥形齿轮、第二锥形齿轮和第一u型框,所述第一电机固定连接于底座的上端并活动贯穿支板的侧端,所述第一转杆转动连接于底座的上端,所述第二锥形齿轮固定连接于第一转杆的圆周表面,所述第一锥形齿轮固定连接于第一电机的输出轴的侧端,所述第一锥形齿轮与第二锥形齿轮啮合连接,所述第一u型框固定连接于第一转杆的上端;定向摆动机构,所述定向摆动机构与转向机构连接以实现其跟随转向机构调整位置;扭向机构,所述扭向机构与定向摆动机构连接以实现其调整下一机构的方向;摇摆机构,所述摇摆机构与扭向机构连接以实现其跟随扭向机构进行调整方向;以及夹持机构,所述夹持机构由夹紧组件和两组避险组件构成,所述夹持机构与摇摆机构固定连接以实现其进行夹持水表外壳的工序。
6.作为本发明一种优选的方案,所述定向摆动机构包括第二电机和两个连接板,所述第二电机固定连接于第一u型框的内壁,所述第二电机的输出轴活动贯穿于第一u型框的
侧端并向外延伸,其中一个所述连接板固定连接于第二电机的输出轴的圆周表面,另一所述连接板转动连接于第一u型框的侧端。
7.作为本发明一种优选的方案,所述扭向机构包括第一固定框、第三电机和第二转杆,所述第一固定框转动连接于两个连接板的相靠近端,所述第三电机固定连接于第一固定框的内壁,所述第三电机的输出轴活动贯穿于第一固定框的侧端并向外延伸,所述第二转杆固定连接于第三电机的输出轴的侧端。
8.作为本发明一种优选的方案,所述摇摆机构包括第二固定框、第四电机和第二u型框,所述第二固定框固定连接于第二转杆远离第一固定框的一端,所述第四电机固定连接于第二固定框的内壁,所述第四电机的输出轴活动贯穿于第二固定框的侧端并向外延伸,所述第二u型框的内壁固定连接于第四电机的输出轴的侧端,所述第二u型框的一侧内壁转动连接于第四电机的输出轴的侧端。
9.作为本发明一种优选的方案,所述第二u型框的内壁开凿有搁置槽。
10.作为本发明一种优选的方案,所述夹紧组件包括第五电机、夹块、夹板、第二固定板、第六电机、两个转盘、两个齿条、两个夹条、两个连接杆和两个夹头,所述第五电机固定连接于搁置槽的内壁,所述夹块固定连接于第五电机的输出轴的侧端,所述夹板固定连接于夹块的内壁,所述第二固定板固定连接于夹板的侧端,所述第六电机固定连接于第二固定板的侧端,所述第六电机的输出轴一侧活动贯穿于第二固定板与夹板的侧端并向外延伸,任意所述转盘固定连接于第六电机的输出轴,另一所述转盘转动连接于夹板的侧端,两个所述齿条分别固定连接于两个转盘的圆周表面,两个所述齿条互相啮合连接,两个所述连接杆均转动连接于夹板的侧端,两个所述夹条分别转动连接于两个转盘与两个连接杆的末端,两个所述夹头分别固定连接于两个夹条的末端。
11.作为本发明一种优选的方案,每组所述避险组件均包括第三固定板、挂块、空槽和多个弹簧,多个所述弹簧均固定连接于连接杆的内侧端,所述第三固定板固定连接于多个弹簧的末端,所述挂块固定连接于第三固定板的下端,所述空槽开凿于连接杆的下端,所述挂块活动卡接于空槽的内壁。
12.作为本发明一种优选的方案,所述支板的侧端固定连接有盖板,所述盖板远离第一转杆的一侧固定连接有第一固定板。
13.作为本发明一种优选的方案,所述底座的表面固定连接有多个第一缓冲垫,所述第六电机的表面固定连接有多个第二缓冲垫,两个所述连接板的相邻端固定连接有挡板,所述挡板的侧端开凿有挡槽。
14.作为本发明一种优选的方案,所述底座的内部设置有传感器,所述传感器分别与第一电机、第二电机、第三电机、第四电机、第五电机和第六电机电性连接。
15.与现有技术相比,本发明的有益效果是:1、本发明中,通过底座内部设置的传感器与第一电机、第二电机、第三电机、第四电机、第五电机和第六电机电性连接,从而分别控制转向机构、定向摆动机构、扭向机构和摇摆机构的运作,达到调整夹持机构的空间位置将毛坯搬运到工装位置,各机构协调配合,效率比较人工搬运大幅度提高。
16.2、本发明中,转向机构通过改变第一电机的输出轴的运转方向,通过第一锥形齿轮与第二锥形齿轮的啮合连接,将第一电机的输出轴方向由水平改变为垂直,即将第一转
杆转动,从而将第一u型框转动,使得本发明的工作方向拓展到360
°
。
17.3、本发明中,夹紧组件通过启动第六电机,第六电机的输出轴带动其中一个转盘在夹板的上端转动,通过两个齿条相互啮合作用带动另一个转盘,两个转盘的末端分别转动连接两个夹条,且两个夹条同时受到两个连接杆的限制作用,两个夹条的开合角度受到限制,防止两个夹条开合角度过大导致机构的损坏,从而抬高夹紧组件的使用寿命。
附图说明
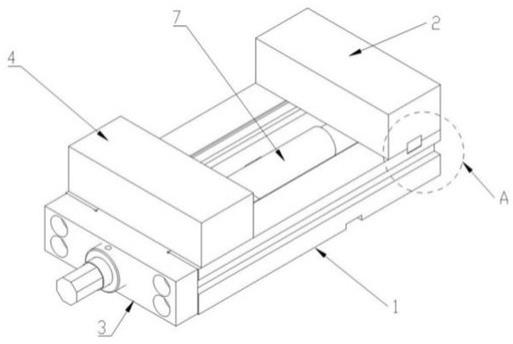
18.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明的主视图;图2为本发明中的侧视图;图3为本发明中的第一爆炸图;图4为本发明中的第二爆炸图;图5为本发明中的转向机构剖面图;图6为本发明中的扭向机构放大图;图7为本发明中的定向摆动机构放大图;图8为本发明中的夹紧组件主视图;图9为本发明中的夹紧组件后视图;图10为本发明中的避险组件剖面图。
19.图中:1、底座;101、第一缓冲垫;2、支板;201、盖板;202、第一固定板;3、第一电机;4、第一转杆;5、第一锥形齿轮;6、第二锥形齿轮;7、第一u型框;8、第二电机;9、连接板;10、挡板;11、挡槽;12、第一固定框;13、第三电机;14、第二转杆;15、第二固定框;16、第四电机;17、第二u型框;18、搁置槽;19、第五电机;20、夹块;21、夹板;22、第二固定板;23、第六电机;2301、第二缓冲垫;24、转盘;25、齿条;26、夹条;27、连接杆;28、第三固定板;29、弹簧;30、挂块;31、空槽;32、夹头。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.实施例1请参阅图1-9,本发明提供以下技术方案:一种应用于水表外壳大口加工的柴孚六轴机器人机械爪,包括:底座1,底座1的上端固定连接有支板2;转向机构,转向机构包括第一电机3、第一转杆4、第一锥形齿轮5、第二锥形齿轮6和第一u型框7,第一电机3固定连接于底座1的上端并活动贯穿于支板2的侧端,第一转杆4转动连接于底座1的上端,第二锥形齿轮6固定连接于第一转杆4的圆周表面,第一锥形齿轮5固定连接第一电机3的输出轴的侧端,第一锥形齿轮5与第二锥形齿轮6啮合连接,第一u型
框7固定连接于第一转杆4的上端;定向摆动机构,定向摆动机构与转向机构连接以实现其跟随转向机构调整位置;扭向机构,扭向机构与定向摆动机构连接以实现其调整下一机构的方向;摇摆机构,摇摆机构与扭向机构连接以实现其跟随扭向机构进行调整方向;以及夹持机构,夹持机构由夹紧组件和两组避险组件构成,夹持机构与摇摆机构连接以实现其进行夹持水表外壳的工序。
22.在本发明的具体实施例中,转向机构通过改变第一电机3的输出轴的运转方向,通过第一锥形齿轮5与第二锥形齿轮6的啮合连接,将第一电机3的输出轴方向由水平改变为垂直,即将第一转杆4转动,从而将第一u型框7转动,使得本发明的工作方向拓展到360
°
,转向机构直接带动定位摆动机构沿着第一转杆4的圆心轴转动,使得其余机构调整角度旋转,扭向机构通过与定向摆动机构转动连接以实现其调整摇摆机构的方向,摇摆机构通过与扭向机构固定连接以实现其跟随扭向机构进行调整方向,夹持机构通过与摇摆机构固定连接以实现其进行夹持水表外壳的工序。
23.具体的请参阅图5和图6,定向摆动机构包括第二电机8和两个连接板9,第二电机8固定连接于第一u型框7的内壁,第二电机8的输出轴活动贯穿于第一u型框7的侧端并向外延伸,其中一个连接板9固定连接于第二电机8的输出轴的圆周表面,另一连接板9转动连接于第一u型框7的侧端。
24.本实施例中:第二电机8启动后,第二电机8的输出轴带动其中一个连接板9转动,由于两个连接板9的另一端均转动连接于第一固定框12的两端,因此两个连接板9跟随第二电机8的输出轴的转动,从而调整第一固定框12的高度,第二电机8可以根据实际需求选择不同的型号,例如选择型号为yy5034,第二电机8与外部电源电性连接,对于本领域技术人员而言,上述第二电机8为现有技术,在此不做过多赘述。
25.具体的请参阅图5和图6,扭向机构包括第一固定框12、第三电机13和第二转杆14,第一固定框12转动连接于两个连接板9的相靠近端,第三电机13固定连接于第一固定框12的内壁,第三电机13的输出轴活动贯穿于第一固定框12的侧端并向外延伸,第二转杆14固定连接于第三电机13的输出轴的侧端。
26.本实施例中:扭向机构通过第三电机13的转动,第三电机13的输出轴带动第二转杆14的转动,即可将第二固定框15沿着第二转杆14的圆心轴转动,即可将摇摆机构和夹持机构做旋转运动。
27.具体的请参阅图5和图6,摇摆机构包括第二固定框15、第四电机16和第二u型框17,第二固定框15固定连接于第二转杆14远离第一固定框12的一端,第四电机16固定连接于第二固定框15的内壁,第四电机16的输出轴活动贯穿于第二固定框15的侧端并向外延伸,第二u型框17的内壁固定连接于第四电机16的输出轴的侧端,第二u型框17的一侧内壁转动连接于第四电机16的输出轴的侧端。
28.本实施例中:第四电机16的启动后,第四电机16的输出轴带动第二u型框17的转动,从而使得夹持机构随之转动。
29.具体的请参阅图5和图6,第二u型框17的内壁开凿有搁置槽18。
30.本实施例中:搁置槽18的设置用于固定连接第五电机19,使其夹持机构跟随摇摆机构进行转动。
31.具体的请参阅图5和图6,夹紧组件包括第五电机19、夹块20、夹板21、第二固定板22、第六电机23、两个转盘24、两个齿条25、两个夹条26、两个连接杆27和两个夹头32,第五电机19固定连接于搁置槽18的内壁,夹块20固定连接于第五电机19的输出轴的侧端,夹板21固定连接于夹块20的内壁,第二固定板22固定连接于夹板21的侧端,第六电机23固定连接于第二固定板22的侧端,第六电机23的输出轴一侧活动贯穿于第二固定板22与夹板21的侧端并向外延伸,任意转盘24固定连接于第六电机23的输出轴,另一转盘24转动连接于夹板21的侧端,两个齿条25分别固定连接于两个转盘24的圆周表面,两个齿条25互相啮合连接,两个连接杆27均转动连接于夹板21的侧端,两个夹条26分别转动连接于两个转盘24与两个连接杆27的末端,两个夹头32分别固定连接于两个夹条26的末端。
32.本实施例中:夹紧组件通过启动第六电机23,第六电机23的输出轴带动其中一个转盘24在夹板21的上端转动,通过两个齿条25相互啮合作用带动另一个转盘24,两个转盘24的末端分别转动连接两个夹条26,且两个夹条26同时受到两个连接杆27的限制作用,两个夹条26的开合角度受到限制,防止两个夹条26开合角度过大导致机构的损坏,从而抬高夹紧组件的使用寿命。
33.具体的请参阅图9,每组避险组件均包括第三固定板28、挂块30、空槽31和多个弹簧29,多个弹簧29均固定连接于连接杆27的内侧端,第三固定板28固定连接于多个弹簧29的末端,挂块30固定连接于第三固定板28的下端,空槽31开凿于连接杆27的下端,挂块30活动卡接于空槽31的内壁。
34.本实施例中:多个弹簧29的设置在连接杆27的侧端中,第三固定板28固定连接在多个弹簧29的一端,两个连接杆27在靠近过程中将水表外壳夹紧后,两个第三固定板28靠近水表外壳做缓冲防止夹坏外壳,多个弹簧29做进一步缓冲,挂块30活动卡接于空槽31的内壁防止第三固定板28下落。
35.具体的请参阅图3和图4,支板2的侧端固定连接有盖板201,盖板201远离第一转杆4的一侧固定连接有第一固定板202。
36.本实施例中:盖板201的设置防止第一电机3的表面附着异物,第一固定板202的设置用于将第一电机3密封。
37.具体的请参阅图1和图2,底座1的表面固定连接有多个第一缓冲垫101,第六电机23的表面固定连接有多个第二缓冲垫2301,两个连接板9的相邻端固定连接有挡板10,挡板10的侧端开凿有挡槽11。
38.本实施例中:多个第一缓冲垫101的设置防止本发明在运作过程中操作不当夹持机构误碰到底座1的表面,第二缓冲垫2301的设置也有同等功效,进一步保护第六电机23,挡槽11的设置使得第二转杆14在过度下沉时触碰到两个连接板9。
39.具体的请参阅图和图2,底座1的内部设置有传感器,传感器分别与第一电机3、第二电机8、第三电机13、第四电机16、第五电机19和第六电机23电性连接。
40.本实施例中:通过底座1内部设置的传感器与第一电机3、第二电机8、第三电机13、第四电机16、第五电机19和第六电机23电性连接,从而分别控制转向机构、定向摆动机构、扭向机构和摇摆机构的运作,达到调整夹持机构的空间位置将毛坯搬运到工装位置,各机构协调配合,效率比较人工搬运大幅度提高。
41.本发明的工作原理及使用流程:传感器与第一电机3、第二电机8、第三电机13、第
四电机16、第五电机19和第六电机23电性连接,从而分别控制转向机构、定向摆动机构、扭向机构和摇摆机构的运作,达到调整夹持机构的空间位置将毛坯搬运到工装位置,各机构协调配合,转向机构直接带动定位摆动机构沿着第一转杆4的圆心轴转动,使得其余机构调整角度旋转,扭向机构通过与定向摆动机构转动连接以实现其调整摇摆机构的方向,摇摆机构通过与扭向机构固定连接以实现其跟随扭向机构进行调整方向,夹持机构通过与摇摆机构固定连接以实现其进行夹持水表外壳的工序,通过启动第六电机23,第六电机23的输出轴带动其中一个转盘24在夹板21的上端转动,通过两个齿条25相互啮合作用带动另一个转盘24,两个转盘24的末端分别转动连接两个夹条26,两个连接杆27在靠近过程中将水表外壳夹紧后,两个第三固定板28靠近水表外壳做缓冲防止夹坏外壳,挂块30活动卡接于空槽31的内壁防止第三固定板28下落。
42.最后应说明的是:以上仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。