1.本发明涉及水准测量方法,更具体地说是指一种营运中大桥跨河水准测量方法。
背景技术:
2.大桥变形监测中需要精确测定桥墩之间的不均匀沉降,河流两岸水准高程联测在不封闭大桥通行的情况下需要通过跨河水准的方式建立两岸之间的高程联系。跨河水准主要由光学测微法、倾斜螺旋法、经纬仪倾角法、测距三角高程法、gps水准测量法构成。
3.gb/t 12897-2006《国家一、二等水准测量规范》和《海岛(礁)跨海高程传递测量技术规程(试行)》(927工程项目办公室2010年6月)对采用测距三角高程法做出了相应的规定:布设跨海高程传递场地,应在两岸分别各设立2个跨海观测点,组成如图1所示的大地四边形,其中,a、b、c、d为跨海观测点,同岸两跨海观测墩应尽可能等高,同岸两观测点的间距应不小于20m,确有困难的地区应不小于10m。根据实地情况,宜在两岸距跨海观测点100m~300m处,布设1~2个水准点,作为跨海观测点稳定性检测及水准联测之用,水准标石的规格和点之记绘制及委托保管书。每处跨海高程测量依次在各观测墩设站,分别观测a—c、a—d、b—c、b—d四条测线的垂直角。当完成一条测线的一光段垂直角观测后,可迁移测站和觇灯,观测另一条测线的垂直角。采用仪器与照准装置上下分置或左右分置方法时,其各测线垂直角观测方法可分别参照《国家一、二等水准测量规范》(gb/t 12897-2006)中测距三角高程法规定的单觇板法和双觇板法执行。两岸应同步对向观测。两台仪器对向观测时,应使用通讯设备,使两岸同一测线的观测应做到同时开始与结束,同步观测时间差尽可能小。最长控制在1分钟以内,并同步做好观测始末时间记录,以便在出现超限时回溯、分析。当观测一定光段数时,应对观测人员、仪器和觇标进行调岸,应严格控制观测员、仪器及觇标在两岸观测的总光段数对称。一条测线的观测完成后,应间歇10分钟,再开始下一测线的观测。
4.现有的技术方案观测方法如下:水准仪测定本岸站点间高差hab和hcd;用全站仪测量测站点间的距离d-ac、d-ad、d-bc、d-bd;垂直角观测程序:a、c两点设全站仪,b、d两点设标尺;首先观测本岸近标标定仪器高测定bb,bd然后同步观测对岸远标尺,测定aad、acb;a点仪器不动,c点移到d点,同步观测对岸远标尺,测定aac、adb;d点仪器不动,同步观测对岸远标尺,测定abc、ada;b点仪器不动,观测本岸近标尺,测定ba,再将d点仪器移回到c点,同步观测对岸远标尺,测定abd、aca,其中,a是垂直角,aac即a\c两点间的垂直角,acb即c\b两点间的垂直角,aad即a\d两点间的垂直角,adb即d\b两点间的垂直角,abc即b\c两点间的垂直角,ada即d\a两点间的垂直角,最后,c点仪器观测本岸近标尺,至此,第一仪器位置的观测结束,2台仪器共完成4个单测回的观测量;观测员、仪器、标尺相互调岸按上述观测程序完成第二时段仪器位置的观测。
5.现有的测量方法,观测程序繁琐,同一条边不能做到完全同步,同时运营中的大桥受到车辆通行的影响,平台总会有晃动,因此,角度观测的组数及每组中的数据量均大于规范要求叠加潮汐影响,成果不容易合格。
6.因此,有必要设计一种新的方法,实现减少频繁换站,减少人工测量误差,提高工
作效率,消弱潮汐影响。
技术实现要素:
7.本发明的目的在于克服现有技术的缺陷,提供一种营运中大桥跨河水准测量方法。
8.为实现上述目的,本发明采用以下技术方案:一种营运中大桥跨河水准测量方法,包括:
9.设置观测墩;
10.实时查询潮汐预报资料,在涨潮至平潮的时间段内选择观测时段;
11.获得同一岸边的棱镜的水准高度差;
12.在观测墩上对向架设两台测量机器人;
13.实时导入测距时的气象条件,自动改正测距值进行改正;
14.对同一岸边的棱镜未对调时的光段设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次;
15.当同一岸边的棱镜未对调时的光段观测完毕后,将同一岸边的棱镜对调,设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次;
16.当同一岸边的棱镜对调后的光段观测完毕,将测量机器人和棱镜同时进行换岸操作,实时导入测距时的气象条件,自动改正测距值进行改正;
17.对测量机器人和棱镜同时进行换岸操作后的同一岸边的棱镜未对调时的光段设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次;
18.当对测量机器人和棱镜同时进行换岸操作后的同一岸边的棱镜未对调时的光段观测完毕后,将同一岸边的棱镜对调,设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次;
19.当测量机器人和棱镜同时进行换岸操作后的所有光段都观测完毕,分析观测得到的每组数据的分布规律;
20.根据所述分布规律、同一岸边的棱镜的水准高度差以及各光段的棱镜之间的高度差计算跨河高差。
21.其进一步技术方案为:所述观测墩的对向对称布设,所述观测墩包括六个墩柱,且每三个墩柱为一组,设置在同一岸边,一组墩柱内的三个墩柱呈等边三角形布置,且墩距10米,每个墩柱高度相等,每组墩柱的中间墩柱是用于架设仪器的墩柱,每组墩柱的两边是用于架设棱镜的墩柱,每个墩柱上设有强制对中盘。
22.其进一步技术方案为:所述设置观测墩,包括:
23.在桥墩面上用水钻至少钻4个矩形排列的钻孔,并对钻孔进行清洗、风干;
24.用植筋胶分别在四个钻孔中植入螺纹钢筋作为观测墩的支柱主筋;
25.在支柱主筋上间隔捆扎钢筋圈,形成钢笼,将观测墩的底盘座捆扎到钢笼内;
26.采用现浇混凝上加高强度白色pvc套管施工工艺进行浇筑,以形成观测墩。
27.其进一步技术方案为:浇筑所采用的材料包括强度等级p.o 42.5的普通硅酸盐水泥、5-40mm级和石子和中砂以及饮用水。
28.其进一步技术方案为:浇筑所采用的材料还包括外加剂。
29.其进一步技术方案为:所述实时导入测距时的气象条件,自动改正测距值进行改正,包括:
30.使用测量机器人测距并进行垂直角测定,通过温度气压传感器实时导入测距时的气象条件,自动改正测距值进行改正,得到改正后的斜距。
31.其进一步技术方案为:所述设置自动观测程序,同步观测同一岸边棱镜,观测4组且每组10次,包括:
32.设置自动观测程序,垂直角指标差互差不大于30
″
,垂直角测回差不大于30
″
,同步观测同一岸边棱镜,观测4组且每组10次。
33.其进一步技术方案为:所述分析观测得到的每组数据的分布规律,包括:
34.通过python分析观测得到的每组数据的分布规律。
35.其进一步技术方案为:所述根据所述分布规律、同一岸边的棱镜的水准高度差以及各光段的棱镜之间的高度差计算跨河高差,包括:
36.获取各光段的棱镜之间的高度差,结合跨河观测前测得的同一岸边的棱镜的水准高度差,组成四个三角形和一个四边形闭合环,统计各条边光段互差和环闭合差,对超限数据进行重测后,取各边平均值进行平差,确定跨河主边,获得跨河高差。
37.本发明与现有技术相比的有益效果是:本发明通过采用等边三角形设站,对向同步观测,抵消球气差影响,棱镜对调抵消设备高度加工误差,通过公开的潮汐预报图,择观测时段在涨潮至平潮的时间段内,消弱潮水对桥墩的冲击影响,对于观测目标的随机性震动。采用分组多次观测,利用python探寻分布规律,计算逼近真值,实现减少频繁换站,减少人工测量误差,提高工作效率,消弱潮汐影响。
38.下面结合附图和具体实施例对本发明作进一步描述。
附图说明
39.为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
40.图1为现有技术的跨海高程传递示意图;
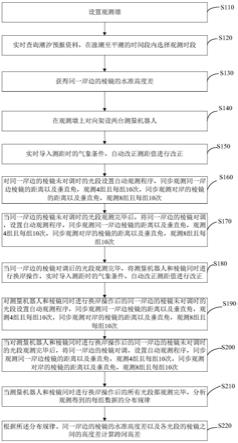
41.图2为本发明实施例提供的一种营运中大桥跨河水准测量方法的流程示意图;
42.图3为本发明实施例提供的一种营运中大桥跨河水准测量方法的子流程示意图;
43.图4为本发明实施例提供的观测墩布设示意图;
44.图5为本发明实施例提供的观测墩的剖切面示意图;
45.图6为本发明实施例提供的潮汐预报图;
46.图7为本发明实施例提供的python分析结果示意图;
47.图8为本发明实施例提供的高差平差路线的示意图。
具体实施方式
48.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
49.应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
50.还应当理解,在此本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
51.还应当进一步理解,在本发明说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
52.请参阅图2,图2为本发明实施例提供的一种营运中大桥跨河水准测量方法的示意性流程图。一种营运中大桥跨河水准测量方法可运用测量跨河水准差,减弱因为运营中大桥由于轻微震动产生的观测误差,克服频繁调站提高效率,具体地,采用测量机器人自动观测模式,在桥墩x型托架顶面上设置观测墩,墩顶设置仪器强制对中装置,用来架设仪器和棱镜,在桥墩x型托架上设置三座等边三角形观测墩,采用测量机器人自动化观测法的照准目标棱镜,使用atr模式自动寻找目标并自动观测记录,设定限差值,对超限数据自动返工观测。通过自动观测大量数据,分析其变化规律,测定与震动剧烈目标间的准确高差,利用python分析计算,可发现其变化规律,剔除噪点,计算出两点之间准确高差,自动化观测减少人为观测误差。
53.如图2所示,该方法包括以下步骤s110至s220。
54.s110、设置观测墩。
55.在本实施例中,如图4所示,所述观测墩的对向对称布设,所述观测墩包括六个墩柱,且每三个墩柱为一组,设置在同一岸边,墩距10米,一组墩柱内的三个墩柱呈等边三角形布置,且墩距10米,每个墩柱高度相等,每组墩柱的中间墩柱是用于架设仪器的墩柱,每组墩柱的两边是用于架设棱镜的墩柱,每个墩柱上设有强制对中盘。观测墩的墩柱等高,高度1.1米。
56.于其他实施例中,仪器两端的棱镜也可以布设成按中心轴对称也能实现本功能,因此以仪器所在的墩柱为中轴线,两个棱镜布设在中轴线两侧方式的方式确定其他两个墩柱,由此确定每组的墩柱布设形式。
57.采用等边三角形设站,对向同步观测,由于对向观测前后时间差较小,观测墩等高,故视线基本水平,往返测两差改正基本抵消,可认为为0。设置对称的2对6个观测墩,虽然相比平行四边形设站多设置了2个观测墩,但减少仪器和棱镜的同岸互调,提高1倍以上工作效率。
58.在一实施例中,请参阅图3,上述的步骤s110可包括步骤s111~s114。
59.s111、在桥墩面上用水钻至少钻4个矩形排列的钻孔,并对钻孔进行清洗、风干。
60.具体地,观测墩建造需在桥墩面上用水钻至少钻4个深10~20cm的矩形排列的钻
孔(孔径为12mm);并对钻孔进行清洗、风干。
61.s112、用植筋胶分别在四个钻孔中植入螺纹钢筋作为观测墩的支柱主筋;
62.s113、在支柱主筋上间隔捆扎钢筋圈,形成钢笼,将观测墩的底盘座捆扎到钢笼内。
63.在本实施例中,如图6所示,用植筋胶分别在四个钻孔中植入直径为12mm的螺纹钢筋作为观测墩的支柱主筋;支柱主筋上每隔15cm捆扎一个钢筋直径为8mm的钢筋圈形成钢笼,测墩底盘座捆扎到钢笼。
64.s114、采用现浇混凝上加高强度白色pvc套管施工工艺进行浇筑,以形成观测墩。
65.具体地,浇筑所采用的材料包括强度等级p.o 42.5的普通硅酸盐水泥、5-40mm级和石子和中砂以及饮用水。浇筑所采用的材料还包括外加剂。
66.具体地,观测墩采用现浇混凝上加250-350mm高强度白色pvc套管施工工艺,混凝土强度等级c30。支柱主筋最小砼保护层厚度为30mm,搅拌现场必须配有合格的称量器具,严格按照配合比下料。根据施工情况混凝上需加拌外加剂如:早强剂、防冻剂、引气剂等,质量必须合格,不得使用含氯盐的外加剂。
67.s120、实时查询潮汐预报资料,在涨潮至平潮的时间段内选择观测时段。
68.在本实施例中,请参阅图7,为消弱潮汐影响,实时查询潮汐预报资料,择观测时段在涨潮至平潮的时间段内。平台晃动主要受潮流、风力和桥梁震动的影响,根据公开的潮汐预报图,选择涨潮而且快接近平潮的时间开始观测,保证落潮前完成全部观测任务,同时风力温和,尽量减小环境的影响。
69.s130、获得同一岸边的棱镜的水准高度差。
70.请参阅图4,采用二等水准测量方式获得同一岸边的棱镜比如a-b、c-d的水准高度差。
71.s140、在观测墩上对向架设两台测量机器人;
72.s150、实时导入测距时的气象条件,自动改正测距值进行改正。
73.在本实施例中,不在同一高度上的两点之间的距离即为斜距,使用测量机器人测距并进行垂直角测定,通过温度气压传感器实时导入测距时的气象条件,自动改正测距值进行改正,得到改正后的斜距。
74.s160、对同一岸边的棱镜未对调时的光段设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次。
75.观测的过程主要是进行测距和垂直角的测定。
76.在本实施例中,在观测墩上架设测量机器人,设置自动观测程序,垂直角指标差互差不大于30
″
,垂直角测回差不大于30
″
,同步观测同一岸边棱镜比如a/b或者c/d,观测4组且每组10次,也就是观测时,总共观测4组,每一组的观测次数为10次,总观测次数为40次。需要先确定本岸棱镜,也就是当前观测的是哪一岸边的棱镜,是a与b的还是c与d的。
77.在本实施例中,同步观测对岸棱镜c\d和a\b,当步骤s150观测同一岸边棱镜即本岸棱镜a\b时,对岸的棱镜则为c\d;当步骤s150观测同一岸边棱镜即本岸棱镜c\d时,对岸的棱镜则为a\b;观测对岸的棱镜时,总共观测8组,每组10次,总观测次数为80次。
78.由于大桥处于运营状态,通行不封闭,桥墩处于时刻震动中,无法满足垂直角指标
差互差不大于5
″
,垂直角测回差不大于4
″
的要求。故根据观测经验,设置垂直角指标差互差不大于30
″
,垂直角测回差不大于30
″
,长边观测8组,近边观测4组,每组均为10次的自动观测程序方式进行测量。并直接将观测所得的斜距进行改正后纳入跨河水准计算。
79.s170、当同一岸边的棱镜未对调时的光段观测完毕后,将同一岸边的棱镜对调,设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次。
80.当一个光段完成后,需要进行换岸边操作,也就是将棱镜a和棱镜b换到棱镜c和棱镜d所在的岸边,将棱镜c和棱镜d换到原先棱镜a和棱镜b所在的岸边,进行其他光段的观测,直至所有的光段均观测完毕。
81.同一岸边的棱镜对调后重复执行上述步骤s160~s170的观测过程,此处不再赘述。
82.s180、当同一岸边的棱镜对调后的光段观测完毕,将测量机器人和棱镜同时进行换岸操作,实时导入测距时的气象条件,自动改正测距值进行改正;
83.具体地,将本岸棱镜对调,也就是将a和b对调,将c和d对调。
84.s190、对测量机器人和棱镜同时进行换岸操作后的同一岸边的棱镜未对调时的光段设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次;
85.s200、当对测量机器人和棱镜同时进行换岸操作后的同一岸边的棱镜未对调时的光段观测完毕后,将同一岸边的棱镜对调,设置自动观测程序,同步观测同一岸边棱镜的距离以及垂直角,观测4组且每组10次,同步观测对岸的棱镜的距离以及垂直角,观测8组且每组10次;
86.测量机器人和棱镜同时进行换岸操作后重复执行上述步骤s160~s170的观测过程,此处不再赘述。s210、当测量机器人和棱镜同时进行换岸操作后的所有光段都观测完毕,分析观测得到的每组数据的分布规律;
87.在本实施例中,通过python分析观测得到的每组数据的分布规律。
88.具体地,先将观测所得的数据导入软甲内,读取execl表格,并采用katest方校验,参数分别是待检验的数据,检验方法(这里设置成norm正态分布)均值与标准差,结果返回两个值,ststistic即d值,pvalue即p值,当p值大于0.05时为正态分布,计算均值、标准差,画散点图和直方图,并创建对应的子图,如图7所示。
89.s220、根据所述分布规律、同一岸边的棱镜的水准高度差以及各光段的棱镜之间的高度差计算跨河高差。
90.具体地,获取各光段的棱镜之间的高度差,结合跨河观测前测得的同一岸边的棱镜的水准高度差,组成四个三角形和一个四边形闭合环,统计各条边光段互差和环闭合差,对超限数据进行重测后,取各边平均值进行平差,确定跨河主边,获得跨河高差。
91.请参阅图8,上述的通过计算获得各光段的棱镜a-c、a-d、b-c、b-d的高度差,结合跨河观测前测得的同一岸边的棱镜的水准高度差即棱镜a-b、c-d的水准高差,组成了4个三角形和1个四边形闭合环,统计各条边光段互差(n表示测回数,s表示跨河视线长度)和环闭合差,对超限数据进行重测后,取各边平均值进行平差,以a-c边作为跨河主边获得跨河高差。
92.具体地,采用同步对向观测,根据三角高程高差公式,得到对向观测高差中数:式中:h
ac
为棱镜a、c两点间高差;d为两点间平距;α为垂直角;i为仪器高;v为棱镜高;f为球气差该正。由于采用对向同步观测,观测等高,视线基本水平,球气差可抵消。由于观测墩采用强制对中装置,仪器高和棱镜高得误差是设备工业加工误差,采用对调得方式可以抵消。
93.根据误差传播理论,高差h
ac
得误差公式可简化为得误差公式可简化为
94.垂直角观测误差:按8组数据,每组10次计算,tm50观测精度0.5
″
,半测回测角中误差:
95.距离观测误差:平距观测受震动影响小,且垂直角小,可直接按标称精度进行评估,tm50测距标称精度0.6mm 1ppm,500米距离误差md=1.1mm;500m距离为垂直角α=1
°
,将上述误差估算值及距离角度值代入上述误差估算值及距离角度值代入得到m h=0.14mm。即跨河高差为0.14mm。
96.举个例子:对嘉绍大桥总长2680米得主航道桥10处桥墩,采用此方法实施9处跨海高程传递,二等跨河水准最大光段互差为3.1mm(z9墩——z10墩),允许限差
±
3.6mm;最小光段互差为0.0mm(z1墩——z2墩),允许限差
±
3.6mm。光段均值最大闭合差为-2.72mm(z1墩——z2墩的环“z2x-1——z2x-2——z1x-2——z1x-1”),允许限差
±
3.8mm,最小闭合差为-0.02mm(z1墩——z2墩的环“z2x-1——z2x-2——z1x-1”),允许限差
±
3.8mm,光段差值平均是1.9mm,中数闭合差的平均值是-0.3mm。两年重复后观测差值0.9mm,符合方案要求,实验具有可重复性。
97.上述的一种营运中大桥跨河水准测量方法,通过采用等边三角形设站,对向同步观测,抵消球气差影响,棱镜对调抵消设备高度加工误差,通过公开的潮汐预报图,择观测时段在涨潮至平潮的时间段内,消弱潮水对桥墩的冲击影响,对于观测目标的随机性震动。采用分组多次观测,利用python探寻分布规律,计算逼近真值,实现减少频繁换站,减少人工测量误差,提高工作效率,消弱潮汐影响。
98.本发明实施例方法中的步骤可以根据实际需要进行顺序调整、合并和删减。
99.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
