1.本发明属于航天发射领域与航天测控领域,涉及一种运载火箭多来源多类型测量数据位置基准高精度对齐方法。
背景技术:
2.在航天发射测量数据中,与发射轨道相关的测量数据有三大类:一是各种外弹道测量数据,即雷达测量系统(包括脉冲雷达和高精度测速雷达)与光学测量系统的测量数据;二是惯性导航弹道数据,即运载火箭箭上遥测系统下传的运载火箭惯性测量器件(加速度计与速率陀螺)的输出脉冲数据和导航计算机根据这些脉冲数据解算的弹道数据(即惯性导航弹道数据),由于惯性测量器件的输出脉冲数据与惯性导航弹道数据之间具有严格的对应关系,两者在应用上可等同视之,为了应用方便,在后面的描述中除了特别说明之外一般仅指惯性导航弹道数据;三是运载火箭通过箭上遥测系统下传的卫星导航测量数据。
3.在这三类测量数据中,雷达测量系统的测量位置为运载火箭上安装的应答机天线位置(脉冲雷达的测量位置为脉冲雷达应答机天线、高精度测速雷达的测量位置为测速雷达应答机),光学测量系统的测量位置取为运载火箭发动机火焰中心位置;卫星导航测量系统的测量位置为运载火箭上安装的卫星导航信息接收天线位置;惯性导航测量系统的测量位置为运载火箭惯性测量器件的测量位置,即导航平台测量坐标系原点。位置基准的不一致会导致三类测量数据之间的位置差和速度差,这种差异的存在不仅直接影响三类测量数据的高精度融合,也不可避免地会影响利用惯性导航弹道数据、外弹道测量数据、卫星导航测量数据、运载火箭各系统各类型遥测数据综合分析运载火箭关键过程、关键动作的基本性能和飞行过程的综合性能。
4.在航天发射任务中,位置对齐是指将雷达测量系统的测量位置、光学测量系统的测量位置和卫星导航测量系统的测量位置都对齐到惯性导航测量系统的测量位置上,即,以惯性导航测量系统的测量位置为基准,对其它3种类型测量系统的位置测量数据进行修正,使其与惯性导航弹道数据保持相同的位置基准。目前常用的位置对齐措施主要是,对光学测量系统所测量的发动机喷焰中心位置与惯性导航测量系统的测量位置之间的差异进行修正,即光测位置修正。对脉冲雷达、测速雷达的测量位置与惯性导航测量系统测量位置之间的差异一般不作修正,对测量位置不一致所引起的测速雷达速率测元数据的差异从来不作修正。
5.运载火箭发射轨道多种来源多种类型测量数据高精度融合处理的首要条件就是要求测量位置的一致性。目前并没有保证三类测量数据位置基准一致的对齐原理和高精度修正方法。
技术实现要素:
6.本发明的目的在于提供一种运载火箭多源多类测量数据位置基准高精度对齐方法,利用惯性导航测量系统测量位置与其它测量系统测量位置之间的差异,根据测量几何
关系,对其它测量系统测量数据所对应的位置测元进行修正,将其它测量系统测量数据中所有与位置相关的测量数据修正到惯性导航测量系统的测量位置上,从而实现多来源多类型测量数据在空间位置上的一致性,为多来源多类型测量数据高精度融合处理与精细化应用提供技术保障。
7.为实现上述目的,本发明的技术方案如下:
8.一种运载火箭多源多类测量数据位置基准高精度对齐方法,包括如下步骤:
9.步骤一、弹体系位置差转换成导航系位置差;
10.步骤二、导航系位置差转换成地心系位置差;
11.步骤三、分不同的测量系统进行位置测量数据的修正;
12.对卫星导航测量系统位置测量数据的修正,执行步骤四;
13.对于雷达测量系统位置测量数据的修正,执行步骤五至步骤七;
14.对于光学测量系统位置测量数据的修正,执行步骤八至步骤十;
15.步骤四、基于地心系位置差对卫星导航位置测量数据进行修正;
16.步骤五、地心系位置差转换成雷达测量系统测量系位置差;
17.步骤六、雷达测量系统测量系位置差转换成雷达测量系统位置测元差;
18.步骤七、基于雷达测量系统位置测元差对雷达测量系统位置测元数据进行修正;
19.步骤八、地心系位置差转换成光学测量系统测量系位置差;
20.步骤九、光学测量系统测量系位置差转换成光学测量系统位置测元差;
21.步骤十、基于光学测量系统位置测元差对光学测量系统位置测元数据进行修正。
22.进一步地,所述步骤一进一步包括:
23.按照(1)式将弹体系位置差d转换成导航系位置差
[0024][0025]
式中,t
g1
是运载火箭弹体坐标系到导航平台测量坐标系的方向转换矩阵,具体计算式为:
[0026][0027]
式中,为弹体坐标系相对于导航平台测量坐标系的姿态角,该数据可以直接从运载火箭的计算机字遥测参数中获取。
[0028]
进一步地,所述步骤二进一步包括:
[0029]
按照(2)式将导航系位置差转换成地心系位置差
[0030][0031]
式中,t
og
是运载火箭导航测量坐标系到地心坐标系的方向转换矩阵,具体计算式为:
[0032][0033]
式中,t为运载火箭相对于导航计算开始时刻的飞行时间,ωe为地球自转角速率,b0、l0、a0分别为运载火箭的发射点地理纬度、地理经度、发射方位角。
[0034]
进一步地,所述步骤四进一步包括:
[0035]
根据步骤二得到的地心系位置差按照(3)式计算卫星导航位置测量数据[x
s y
s zs]
t
的修正值
[0036][0037]
进一步地,所述步骤五进一步包括:
[0038]
按照(4)式将地心系位置差转换成雷达测量系统测量系位置差
[0039][0040]
式中,t
mo
是地心坐标系到雷达测量系统测量坐标系的方向转换矩阵,具体计算式为:
[0041][0042]
式中,b和l分别为雷达测量系统的地理纬度和地理经度。
[0043]
进一步地,所述步骤六进一步包括:
[0044]
按照(5)式将雷达测量系统测量系位置差转换成雷达测量系统位置测元差[dr da de]
t
:
[0045][0046]
式中,t
am
是雷达测量系统测量系位置差到雷达测量系统位置测元差的转换矩阵,具体计算式为:
[0047][0048]
式中,[r a e]
t
为雷达测量系统的位置测元,其中r表示斜距测元,a表示方位角测
元,e表示高低角测元。
[0049]
进一步地,所述步骤七进一步包括:
[0050]
根据步骤五得到的雷达测量系统位置测元差[dr da de]
t
,按照(7)式计算雷达测量系统位置测元数据[r a e]
t
的修正值
[0051][0052]
进一步地,所述步骤八进一步包括:
[0053]
按照(8)式将地心系位置差转换成光学测量系统测量系位置差
[0054][0055]
式中,是地心坐标系到光学测量系统测量坐标系的方向转换矩阵,具体计算式为:
[0056][0057]
式中,bg和lg分别为光学测量系统的地理纬度和地理经度。
[0058]
进一步地,所述步骤九进一步包括:
[0059]
9.1估算光学测量系统的斜距测元
[0060]
①
根据t时刻前10s之内卫星导航测量系统测量的运载火箭位置数据序列序号i对应着运载火箭的飞行时刻ti,i=1,2,
…
,n,按照下式计算运载火箭在光学测量系统测量坐标系的位置数据序列:
[0061][0062]
式中,是地心坐标系到光学测量系统测量坐标系的方向转换矩阵;
[0063]
②
根据运载火箭在光学测量系统测量坐标系的位置数据序列按照下式计算运载火箭在光学测量系统测量坐标系的斜距序列
[0064][0065]
③
采用二阶多项式端点平滑方法,按照(9)式估算光学测量系统的斜距测元
[0066][0067]
式中,
[0068][0069]
9.2按照(10)式将光学测量系统测量系位置差转换成光学测量系统位置测元差
[0070][0071]
式中,是光学测量系统测量系位置差到光学测量系统位置测元差的转换矩阵,具体计算式为:
[0072][0073]
式中,(a e)为光学测量系统的角度测元。
[0074]
进一步地,所述步骤十进一步包括:
[0075]
根据步骤八得到的光学测量系统的位置测元差按照(11)式计算光学测量系统位置测元数据的修正值
[0076][0077]
本发明的优点是:
[0078]
本发明根据坐标转换的基本方法和航天发射测量数据的基本特性,充分利用卫星导航测量天线与雷达应答机天线在箭体坐标系上位置固定的基本事实,建立外弹道测量位置与惯性导航测量位置的差异对各类测量系统位置测量元素影响的基本传递关系,给出了卫星导航测量系统位置测量数据的修正方法、雷达测量系统位置测元测量数据的修正方法和光学测量系统角度测元测量数据的修正方法,很好的解决了航天发射任务中各类测量数据之间位置一致性的现实问题。
附图说明
[0079]
图1为位置对齐途径示意图。
[0080]
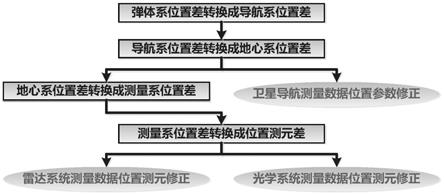
图2为位置对齐主要过程示意图。
[0081]
在图2中,方框标识的4个部分主要实现各类测量数据之间测量位置差的坐标转换,重点解决位置测元修正的原理与方法问题;椭圆框标识的3个部分,主要实现3类测量系统测量位置与惯性导航测量系统测量位置差异的具体修正,重点解决位置测元修正的具体方法与过程问题。
具体实施方式
[0082]
如前所述,以惯性导航测量系统的测量位置为基准,对其它3种类型测量系统的位置测量数据进行修正。
[0083]
本发明中采用的主要记号说明如下:
[0084]
[0085][0086]
运载火箭多源多类测量数据位置基准高精度对齐方法包括如下步骤:
[0087]
步骤一、弹体系位置差转换成导航系位置差;
[0088]
按照(1)式将弹体系位置差转换成导航系位置差
[0089][0090]
式中,t
g1
是运载火箭弹体坐标系到导航平台测量坐标系的方向转换矩阵,具体计算式为:
[0091][0092]
式中,为弹体坐标系相对于导航平台测量坐标系的姿态角,该数据可以直接从运载火箭的计算机字遥测参数中获取。
[0093]
步骤二、导航系位置差转换成地心系位置差;
[0094]
按照(2)式将导航系位置差转换成地心系位置差
[0095][0096]
式中,t
og
是运载火箭导航测量坐标系到地心坐标系的方向转换矩阵,具体计算式为:
[0097][0098]
式中,t为运载火箭相对于导航计算开始时刻的飞行时间,ωe为地球自转角速率,b0、l0、a0分别为运载火箭的发射点地理纬度、地理经度、发射方位角。
[0099]
步骤一和步骤二对于卫星导航测量系统、雷达测量系统和光学测量系统都成立。从下面步骤开始,分不同的测量系统进行位置测量数据的修正:
[0100]
步骤三、分不同的测量系统进行位置测量数据的修正;
[0101]
对卫星导航测量系统位置测量数据的修正,执行步骤四;
[0102]
对于雷达测量系统位置测量数据的修正,执行步骤五至步骤七;
[0103]
对于光学测量系统位置测量数据的修正,执行步骤八至步骤十;
[0104]
步骤四、基于地心系位置差对卫星导航位置测量数据进行修正;
[0105]
根据步骤二得到的地心系位置差按照(3)式计算卫星导航位置测量数据[x
s y
s zs]
t
的修正值
[0106][0107]
步骤五、地心系位置差转换成雷达测量系统测量系位置差;
[0108]
按照(4)式将地心系位置差转换成雷达测量系统测量系位置差
[0109][0110]
式中,t
mo
是地心坐标系到雷达测量系统测量坐标系的方向转换矩阵,具体计算式为:
[0111][0112]
式中,b和l分别为雷达测量系统的地理纬度和地理经度。
[0113]
步骤六、雷达测量系统测量系位置差转换成雷达测量系统位置测元差;
[0114]
按照(5)式将雷达测量系统测量系位置差转换成雷达测量系统位置测元差[dr da de]
t
:
[0115][0116]
式中,t
am
是雷达测量系统测量系位置差到雷达测量系统位置测元差的转换矩阵,具体计算式为:
[0117][0118]
式中,[r a e]
t
为雷达测量系统的位置测元,其中r表示斜距测元,a表示方位角测元,e表示高低角测元。
[0119]
具体的,(5)式的推导过程如下:
[0120]
运载火箭在雷达测量系统测量坐标系中的位置坐标矢量[x
m y
m zm]
t
与雷达测量系统的位置测元[r a e]
t
有如下基本关系:
[0121][0122]
对上式进行全微分,得到
[0123][0124]
对上式进行等价变换,则有
[0125][0126]
即得(5)式。
[0127]
步骤七、基于雷达测量系统位置测元差对雷达测量系统位置测元数据进行修正;
[0128]
根据步骤五得到的雷达测量系统位置测元差[dr da de]
t
,按照(7)式计算雷达测量系统位置测元数据[r a e]
t
的修正值
[0129][0130]
步骤八、地心系位置差转换成光学测量系统测量系位置差;
[0131]
按照(8)式将地心系位置差转换成光学测量系统测量系位置差
[0132][0133]
式中,是地心坐标系到光学测量系统测量坐标系的方向转换矩阵,具体计算式为:
[0134][0135]
式中,bg和lg分别为光学测量系统的地理纬度和地理经度。
[0136]
步骤九、光学测量系统测量系位置差转换成光学测量系统位置测元差;
[0137]
分2步进行:
[0138]
9.1估算光学测量系统的斜距测元
[0139]
①
对于任一测量时刻,不妨记为t时刻,根据t时刻前10s之内卫星导航测量系统测量的运载火箭位置数据序列序号i对应着运载火箭的飞行时刻ti,i=1,2,
…
,n,按照下式计算运载火箭在光学测量系统测量坐标系的位置数据序列:
[0140][0141]
式中,是地心坐标系到光学测量系统测量坐标系的方向转换矩阵。
[0142]
②
根据运载火箭在光学测量系统测量坐标系的位置数据序列按照下式计算运载火箭在光学测量系统测量坐标系的斜距序列
[0143][0144]
③
采用二阶多项式端点平滑方法,按照(9)式估算光学测量系统的斜距测元
[0145][0146]
式中,
[0147][0148]
9.2按照(10)式将光学测量系统测量系位置差转换成光学测量系统位置测元差
[0149][0150]
式中,是光学测量系统测量系位置差到光学测量系统位置测元差的转换矩阵,具体计算式为:
[0151][0152]
式中,(a e)为光学测量系统的角度测元。
[0153]
具体的,(10)式的推导过程如下:
[0154]
运载火箭在光学测量系统测量坐标系中的位置坐标矢量[x
m y
m zm]
t
与光学测量系统的位置测元有如下基本关系:
[0155][0156]
对上式进行全微分,得到
[0157][0158]
对上式进行等价变换,则有
[0159][0160]
即得(10)式。
[0161]
步骤十、基于光学测量系统位置测元差对光学测量系统位置测元数据进行修正;
[0162]
根据步骤八得到的光学测量系统的位置测元差按照(11)式计算光学测量系统位置测元数据的修正值
[0163][0164]
本发明提供的运载火箭多源多类测量数据位置基准修正方法,利用惯性导航测量系统测量位置与其它测量系统测量位置之间的差异,通过修正测量位置偏差所引起的测元偏差对其进行修正,从而实现所有位置测量数据在空间位置上的一致性。根据本发明提供的技术途径,雷达测量系统、光学测量系统和卫星导航测量系统与惯性导航测量系统在弹体坐标系中的测量位置偏差的实测精度决定了这三类测量系统位置测元的修正精度,因此,可以有效地解决运载火箭多来源多类型测量数据位置基准高精度对齐的问题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。