技术特征:
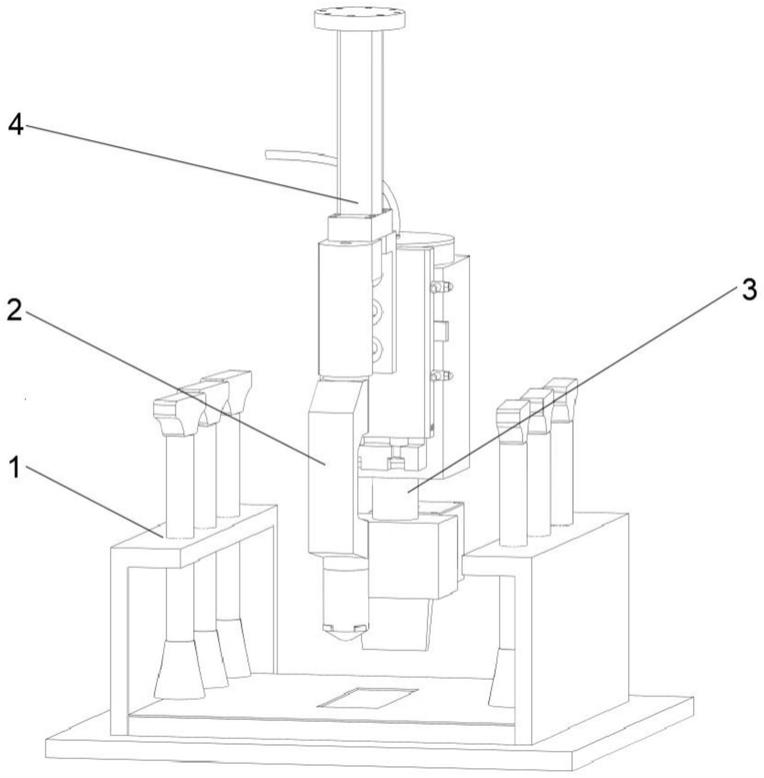
1.一种等离子弧粉末增材制造铺粉熔融成型装置,其特征在于,包括等离子机器人、夹具工作台(1)、等离子焊枪(2)和铺粉装置(3),所述夹具工作台(1)的最底层设置有带开口的底板(11),所述底板(11)上还设置有基板(12)、成型薄板(13),所述基板(12)位于底板(11)的开口设置,其用于防止基板(12)在打印过程发生位移和变形,所述夹具工作台(1)上还设置有用于夹紧成型薄板(13)的螺旋夹头(14),所述等离子焊枪(2)和铺粉装置(3)固定在等离子机器人的连接架(4)上,所述等离子焊枪(2)上还设置有温度传感器(23),所述温度传感器(23)用于监测熔融粉末时的温度数据,所述铺粉装置(3)设置有用于驱动其上下运动的液压装置(32)。2.根据权利要求1所述的一种等离子弧粉末增材制造铺粉熔融成型装置,其特征在于:所述螺旋夹头(14)设置为可松紧结构,所述螺旋夹头(14)用于在等离子机器人工作此过程中,进行反复的松紧以添加成型薄板(13)重复铺粉成型操作。3.根据权利要求1所述的一种等离子弧粉末增材制造铺粉熔融成型装置,其特征在于:所述铺粉装置(3)还包括导管(31)、金属粉末罐支撑架(36)、金属粉末罐(35)和铺粉头(34),所述金属粉末罐支撑架(36)固定在液压装置(32)上,所述液压装置(32)可驱动金属粉末罐支撑架(36)上下运动。4.根据权利要求3所述的一种等离子弧粉末增材制造铺粉熔融成型装置,其特征在于:所述液压装置(32)包括固定架(323)、驱动杆(321)、驱动主体(322)进出液口(324),上端的所述进出液口(324)的进液可带动整个铺粉装置(3)向上移动,反之下端的所述进出液口(324)进液可带动铺粉装置(3)向下移动。5.根据权利要求3所述的一种等离子弧粉末增材制造铺粉熔融成型装置,其特征在于:所述金属粉末罐(35)位于金属粉末罐支撑架(36)内设置,所述金属粉末罐(35)的上端连接的所述导管(31)用于氩气的输入,所述氩气用于带动所述金属粉末罐(35)内的金属粉末向下流动。6.根据权利要求3所述的一种等离子弧粉末增材制造铺粉熔融成型装置,其特征在于:所述金属粉末罐(35)设置有流量控制阀(33),所述流量控制阀(33)用于控制金属粉末罐(35)内在氩气的带动下向下移动至铺粉头上方的金属粉末流量,所述流量控制阀(33)包括外置电机(37),所述外置电机(37)用于通过转速来控制内部叶轮转速控制金属粉末流量。7.根据权利要求1所述的一种等离子弧粉末增材制造铺粉熔融成型装置,其特征在于:所述等离子焊枪(2)包括等离子焊枪枪头(22)、通气导管(21),所述温度传感器(23)位于等离子焊枪枪头(22),所述通气导管(21)为离子气和保护气的通过管道。8.一种基于权利要求1所述一种等离子弧粉末增材制造铺粉熔融成型装置的方法,其特征在于,包括以下步骤:步骤1)放置好夹具工作台(1),在夹具工作台(1)的底部设置好底板(11),在底板(11)中间的开口处放置用于成型的基板(12),再放入成型薄板(13),再旋转螺旋夹头(14)夹紧成型薄板(13);步骤2)打开氩气瓶阀门向盛放金属粉末的金属粉末罐(35)中充入氩气,一定时间后放入高熵合金粉末,在等离子机器人控制端输入预设的铺粉路径,设定好铺粉程序,启动机器人同时打开流量控制阀(33)以及铺粉装置(3)进行铺粉,铺粉完成后,关闭氩气输入,关闭流量控制阀(33),打开液压装置(32)带动整个铺粉装置(3)向上运动到原始位置;
步骤3)铺粉完成后,等离子机器人迅速带动等离子焊枪(2)按照预先设定的熔融路径进行粉末熔融,熔融过程中等离子焊枪枪头(22)会喷出氩气保护气,以保护合金在熔融时不被氧化,在此同时可通过等离子焊枪枪头(22)的温度传感器(23)实时监测等离子焊枪(2)熔融合金时的温度,以保证整个熔融过程中熔融温度基本一致,以此来提高成型合金的组织均匀性;步骤4)熔融一层金属粉末后,通过枪头处的温度传感器(23)监测成型合金冷却到一定温度后,松开螺旋夹头(14)放入下一层的成型薄板(13),再次旋转螺旋夹头(13)夹紧刚放入的下一层的成型薄板(13),重复步骤2,步骤3,直至完成高熵合金块体制作。
技术总结
本发明公开了一种等离子弧粉末增材制造铺粉熔融成型装置及方法,其特点在于通过把固定基板的底板放入夹具工作台上,把基板放入开好口的底板中,在底板上放入开有铺粉开口的成型薄板,反复放入成型薄板后夹紧,然后在等离子机器人上设定好铺粉行走路线,等离子机器带动铺粉器均匀的把难熔高熵合金粉末铺入成型薄板的开口中,铺粉厚度可通过铺粉装置上的送粉转速调节,然后在等离子机器控制端设定等离子焊枪行走路径,以达到熔融粉末的效果,等离子机器人带动等离子焊枪和铺粉装置移动能够实时铺粉实时加工,大大降低了生产周期和生产成本,提高了生产效率,这种熔融方法使粉末受热更均匀解决了金属粉末粘性太高送不出粉的问题。问题。
技术研发人员:陈希章
受保护的技术使用者:温州大学
技术研发日:2021.11.22
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。