1.本发明的领域是其中两个质体被设置在振动中的振动惯性传感器领域。本发明更加具体地涉及mems惯性传感器,其具有平面结构并且被典型地微加工到支撑基底中。
背景技术:
2.音叉惯性传感器对于本领域普通技术人员来说是已知的。在文档ep 2960625中描述了惯性传感器,其被微加工到薄的平面基底中,使得能够测量角位置(回转仪)或者角速度(陀螺仪)。下面回忆一下其主要特征。
3.也被称为mems(微机电系统)传感器的这些微加工传感器的制造使用与用于制造电子集成电路的那些技术共同的微加工技术、蚀刻、掺杂沉积等,允许低的制造成本。
4.这些传感器由图1中示出的两个振动移动质体m1和m2制成,这两个质体定位为一个位于另一个周围(同心)并且经由一个或多个励磁换能器被激励以便在基底的平面(图中的平面xy)中按照音叉模式振动。两个质体通过(对称的)悬挂弹簧rs被悬挂在基底的固定附接点a处。两个质体通过具有刚性rc的元件耦合到彼此。寻求通过构建来实现沿着x的刚性等于沿着y的刚性以及在x和y之间的零耦合刚性。有用的振动模式与两个质体的相位相反的线性振动相对应。
5.这一架构形成具有通过科里奥利(coriolis)加速耦合到彼此的两个质体的共振系统。当陀螺仪围绕与平面xy垂直的轴z(所谓的敏感轴)旋转时,由于科里奥利效应,具有角度旋转向量的被迫振动的构成导致将移动质体设置在与激励振动和敏感轴垂直的自然振动中的力;自然振动的振幅与旋转速度成比例。与传感器相关联的电子元件计算在沿与激励的方向正交的方向上的振动的幅度,与后者(经过假设已知)无关。
6.传感器可以操作在陀螺仪模式中:通过修改激励自然振动的方向关于传感器的壳体保持固定,并且接着输出信息是必要能量的图像,该必要能量有必要施加到激励换能器以便使自然振动的方向保持固定,尽管壳体移动。测量这一反作用力可以得到传感器的角速度ω。传感器也可以在回转仪模式下操作:自然振动的方向为自由的并且被检测以便给出传感器的角度取向。
7.陀螺仪模式表现出以下优点:(i)不具有任何角度噪音,更加精确的是链接到振动的位置的任何角度误差;以及(ii)不具有链接到角度的任何角速度误差变化(漂移)(通过定义,由于关于陀螺仪的参照系保持了恒定角度)。
8.回转仪模式表现出下面的优点:(i)与陀螺仪模式相比较具有非常低的缩放系数误差以及(ii)具有非常高的操作动力学。
9.谐振器的整个结构关于定义传感器参考系的两个轴x和y是轴对称的,如在图2中说明的。轴对称被理解为意味着该结构关于x对称并且关于y对称。如下面描述的,这些轴形成沿着这两个轴操作的致动器/检测器的主要方向。
10.为了在平面的任意给定方向上激励有用的振动模式,激励信号被分解为两个分量,这两个分量具有调节的相应幅度并且被分别施加到与至少一个移动质体(图2中的内部
质体m1)相关联的沿着方向x动作的激励换能器ex以及沿着方向y动作的激励换能器ey。这些换能器能够经由幅度命令(抵抗mems的阻尼)并且沿着平面xy的任意方向,经由旋进命令(旋转波)来维持被迫的振动。
11.所产生的波的移动通过组合由用于检测质体在其位于传感器参考系xy(图2中的每一个中的两个)中的行进中的位置并且与至少一个移动质体相关联的至少一对检测换能器dx、dy收集的信息来进行检测。
12.换能器优选地由以变化的空气间隙交织的梳状电极形成。存在固定的梳状以及移动梳状,该梳状的齿与机器基底的的固定电极交织,该移动梳状的齿与固定梳状的齿交织并且接合到与考虑中的换能器相关联的移动质体。
13.激励主要在于在移动梳状和固定梳状之间以期望的振动频率(悬挂的移动质体的机械共振频率)施加ac电压。所带来的移动与梳状的齿垂直。
14.检测主要在于在固定梳状和移动梳状之间施加偏置电压并且观察由位于固定梳状和移动梳状之间的电容变化产生的负载变化,所述电容变化由在固定梳状的齿与移动梳状的齿之间的间隔变化引起。所测量的移动是与梳状的齿垂直的移动。
15.对于本领域普通技术人员来说已知的是,传感器的生产缺陷导致在其输出处传送的信息中的误差。这些缺陷中的大多数需要通过校准陀螺仪来补偿。
16.已知通过局部移除材料来执行这一补偿,例如通过激光消融,以便修改质体或者刚性分布。这一方法是昂贵的并且甚至在被微加工到薄的硅基底中的陀螺仪上是不可能实现的,陀螺仪的检测和激励移动位于基底的平面中。
17.绘制了在刚性方面两种类型缺陷的区别。振动质体/弹簧组件以2*2刚性矩阵为特征。这一矩阵是对称的,以沿着x为刚性kx、沿着y为刚性ky并且在x和y之间为耦合刚性kxy(其中,kyx=kxy)的参考系xy为特征。由于生产缺陷,kx不同于ky并且kxy为非零,但是,对于传感器的优化操作,寻求实现kx=ky并且kxy=0,也就是说,最终刚性矩阵与单位矩阵成比例。
18.波的振动轴被称为x’。这一轴定义参考系x’y’,其中在mems的平面中,y’与x’垂直。轴x’与轴x形成被称为电学角度(θ)的角度,并且参考系x’y’被称为波参考系。假设时间是波沿着x(x’=x)振动。
19.第一类型的缺陷是在mems的平面中在振动的主轴和与振动垂直、与系统的刚性矩阵相对应的轴之间的频率差,在系统的刚性矩阵中,沿着轴x的刚性与沿着轴y的刚性不同。寻求通过可调节的静电刚性的方式使沿着两个上面提及的轴的共振频率均衡。被称为均衡刚性的这一静电刚性通过沿着方向x和y动作的频率调节换能器tx、ty(在至少一个质体上至少一对,参见图2)进行传送。应用其的目标在于通过减小最高刚性的值使沿着振动的两个轴的刚性均衡,因而使得频率相等。频率校正也被称为频率修剪。
20.第二类型的缺陷起源于在被称为象限偏置的原点处振动的轴与垂直轴之间的机械耦合。这些是关于两个振动质体的组件的动态刚性的各向异性缺点,这在不再是线性而是椭圆的并且与非零耦合刚性kxy的存在相对应的振动中被显现。一种解决方案是经由激励换能器向系统施加(正弦)力f来消除这一项。问题在于这一力的施加没有在精确的正确时间(相位误差)和正确的轴(增益误差)中进行作用,导致施加了漂移。为了避免施加力f,不是通过施加力而是通过经由至少一对换能器q 和q-直接改变谐振器的刚性来物理地消
除项kxy,如在图2中说明的(图2中是2对q /q-)。在x和y上操作的这些换能器位于对角线上以便符合对称和“几何”各向异性,并且出于大体积的原因。修正象限偏置也被称为象限裁剪(或者修剪)。
21.象限修剪换能器因而修改mems传感器的特征以便去除波参考系的两个轴之间的耦合,并且频率修剪换能器修改mems传感器的特征以便去除波参考系的两个轴之间的频率差异。
22.换能器tx、ty、q 和q-优选地也是交织的梳状,如在由dc电压控制的图2和图3中说明的。
23.激励、检测、频率调节和象限偏置校正换能器优选地被实现在两个质体上,如在图3中说明的,索引1与质体m1相对应并且索引2与质体m2相对应。图2和图3代表了非限制性示例性布置,并且许多其它类型的布置是可能的,具有形成轴对称系统的约束。
24.图4说明了根据现有技术的惯性传感器ci0的操作,并且更加具体地说明了频率修剪和象限修剪控制操作。谐振器res包括上面描述的各种换能器并且通过e(激励)、d(检测)、tq(修剪象限)和tf(修剪频率)进行符号化。振动波ov沿着x(x’=x)振动。沿着x’y’的振动模式与激励和检测模式一致。
25.三个控制操作并行控制激励梳状e:旋进控制操作(未示出)将振动波保持在预定角度处(在陀螺仪模式中测量与科里奥利力反作用的作用力);幅度控制操作(未示出)保持波的振动恒定,并且象限控制操作控制力fy以便维持线性振动(经由命令ctqe)。链接到象限力fy的一个问题在于在相位方面以及在其施加的增益或者方向方面的精确度。第四pll环(未示出)寻求识别震荡的相位(在其行进期间质体的位置)。这一pll环不影响振动波;其用作观察器。利用由锁相环传送的信息,能够使力定位以便经由三个上面提及的具有正确相位的控制操作被发送到ex和ey,并且解调检测信号。
26.检测换能器测量在传感器参考系xy中振动的位置(x,y)。除了对激励执行的三个控制操作,分别针对详细修剪和频率修剪执行了第一和第二控制操作。处理单元ut执行各种计算,并且为了修正,生成用于各种换能器的命令:用于经由e换能器施加象限力的命令ctqe、用于tf的频率修剪命令ctf、用于tq的象限修剪命令ctq。用于修剪的命令ctq和ctf是修改谐振器的本征特征的dc电压,而用于力的命令ctqe是正弦电压(参见上面)。对tq的象限命令ctq被调节以便在稳态中实现施加于激励e的零象限力(命令ctqe),从而解决了链接到施加这一力的问题。
27.来自y的信号是余弦解调和正弦解调的。余弦解调用于与象限修剪有关的第一控制操作。所产生的信号由修正器coq1处理并且传送对意在用于去除耦合刚性kxy的象限刚性kq的估计。在第二修正器coq2(积分器)之后并且通过设备gq的方式将刚性转换为电压,象限命令ctq被施加到tq。正弦解调用于与频率修剪相关的第二控制操作。所产生的信号被修正器cof处理,其生成均衡刚性δk,并且接着设备gf将该刚性转换为电压以便生成频率修剪命令ctf。
28.用于频率校正和象限修正的控制操作初始被开发用于非轴对称传感器(x和y不执行相同的作用),该非轴对称传感器被配置以便使用沿着x振动的波操作。在这种情况下,第一和第二控制操作独立地操作并且正确地工作。
29.对于允许使用以角度(θ)而非0
°
振动的波的轴对称传感器,修剪变得依赖于彼此
并且不再正确地工作。例如,对于诸如θ=π/4的一些角度,象限修剪对耦合刚性kxy不再具有任何效果,并且基本上导致第一和第二控制操作。上面描述的不稳定性导致致动器饱和,并且需要重启传感器。因而,当mems传感器以角度θ而非零操作时,可以优选的是停止修剪控制操作,从而导致连接到施加附加力的传感器中的测量误差。
30.本发明的一个目的在于通过提出一种传感器的操作模式来纠正上面提及的缺点,这种操作模式允许对于以任何电学角度振动的波有效地实现频率和象限偏置校正控制操作。
技术实现要素:
31.本发明涉及一种用于确定针对由惯性角度传感器的谐振器生成的振动波的象限命令和频率命令的方法,所述谐振器具有平面和关于彼此垂直的定义传感器参考系xy的两个轴x和y的轴对称结构,并且包括两个振动移动质体(m1,m2),其一个位于另一周围定位,通过耦合弹簧耦合到彼此,并被配置以便在定义波参考系x’y’的方向x’上相位相反地振动,所述谐振器还包括由电压控制并且沿着两个轴x和y操作的多个静电换能器,至少包括位于所述两个质体中的至少一个上的如下换能器;
32.所述谐振器还包括由电压控制的并且沿着两个轴x和y操作的多个静电换能器,至少包括在所述两个质体中的至少一个上的以下换能器:
[0033]-被称为e换能器的一对激励换能器,被配置以便经由幅度命令(ca)将波保持在恒定的幅度,并且在必要时,经由旋进命令(cp)旋转所述振动波,被称为d换能器的一对检测换能器,被配置以便检测所述振动波的移动,被称为tq换能器的一对象限偏置补偿换能器,被配置以便经由象限命令(ctq)施加象限刚性,所述象限刚性被配置以便消除x’和y’之间的耦合刚性,以及被称为tf换能器的一对频率调节换能器,被配置以便经由频率命令(ctf)施加均衡刚性,所述均衡刚性被配置以便消除x’和y’之间的刚性差异以便使所述振动波的谐振频率在x’和y’上均衡,
[0034]
所述方法在所述惯性传感器在以电学角度(θ)为特征的沿着x’振动的振动波操作时使用,所述方法包括步骤:
[0035]-a确定所述电学角度;
[0036]-b分别根据第一控制操作并且根据第二控制操作估计所述象限刚性和均衡刚性的第一值,所述第一值在所述波参考系x’y’中被估计,
[0037]-c根据在步骤b中估计的所述刚性的第一值确定所述象限刚性和均衡刚性在所述传感器参考系xy中的第二值,
[0038]-d确定分别与在步骤c中确定的所述第二值相对应的所述象限命令和所述频率命令,
[0039]-e施加在步骤d中确定的所述频率命令(ctf)和所述象限命令(ctq)
[0040]
根据一变型,所述惯性传感器在陀螺仪模式下操作,在步骤a中确定的所述电学角度等于经由所述旋进命令强加的角度。
[0041]
根据另一变型,所述惯性传感器在回转仪模式下操作,由所述惯性传感器的旋转产生的所述电学角度由所述惯性传感器测量,在步骤a中确定的电学角度等于测量的旋转角度。
[0042]
根据再一变型,根据本发明的所述方法包括:
[0043]-第一阶段,其中所述电学角度描述通过施加所述旋进命令获得的多个电学角度,步骤a到e是针对每个电学角度实现的,步骤d还包括存储相关联的频率命令值的子步骤以及根据所述电学角度确定所述频率命令的变化法则的子步骤,
[0044]-第二阶段,其中所述惯性传感器在回旋仪模式下操作,所述电学角度由于所述惯性传感器的旋转而自由并且由所述惯性传感器测量,所述第二阶段包括:
[0045]
*将所述第二控制操作放置在开环中的步骤(bo),被施加的所述频率命令接着根据针对所述测量的旋转角度的所述变化法则进行确定,
[0046]
*检测谐振频率差异的步骤,只要所述谐振器频率差异小于或者等于预定阈值,所述开环放置步骤就被实现,
[0047]
*当所述频率差异大于所述阈值时,将所述第二控制操作放置回闭环中的步骤,所述方法接着循环回到所述第一阶段以便更新所述变化法则。
[0048]
根据一个实施例,步骤b包括根据对所述振动波在所述传感器参考系xy中的位置的测量并且根据所述电学角度确定所述振动波在所述参考系x’y’中的位置的子步骤b1,以及根据所述波参考系中的所述位置估计所述象限刚性和均衡刚性的第一值的子步骤b2。
[0049]
根据一个实施例,步骤c主要在于通过施加等于由所述第一值定义的向量的两倍电学角度的角度的旋转来确定由所述第二值定义的向量。
[0050]
根据另一方面,本发明涉及一种惯性角度传感器,包括:
[0051]-具有平面和关于彼此垂直的、定义传感器参考系xy的两个轴x和y的轴对称结构的谐振器(res),并且包括两个振动移动质体(m1,m2),其一个位于另一周围定位,通过耦合弹簧耦合到彼此,并被配置以便沿着以电学角度为特征并且定义波参考系x’y’的方向x’上振动的振动波相位相反地振动,所述谐振器还包括由电压控制的并且沿着两个轴x和y操作的多个静电换能器,至少包括在所述两个质体中的至少一个上的以下换能器:
[0052]
被称为e换能器的一对激励换能器,被配置以便经由幅度命令将波保持在恒定的幅度,并且在必要时,经由旋进命令旋转所述振动波,被称为d换能器的一对检测换能器,被配置以便检测所述振动波的移动,被称为tq换能器的一对象限偏置补偿换能器,被配置以便经由象限命令施加象限刚性,所述象限刚性被配置以便消除x’和y’之间的耦合刚性,以及被称为tf换能器的一对频率调节换能器,被配置以便经由频率命令施加均衡刚性,所述均衡刚性被配置以便消除x’和y’之间的刚性差异以便使所述振动波的谐振频率在x’和y’上均衡。分别根据第一控制操作和第二控制操作确定所述象限刚性和均衡刚性。
[0053]
所述传感器还包括处理单元,其被配置以便确定所述电学角度并且包括:
[0054]-第一模块,被配置以便分别根据所述第一控制操作和所述第二控制操作估计所述象限刚性和均衡刚性的第一值,所述第一值在所述波参考系x’y’中被估计,
[0055]-第二模块,被配置以便根据所述刚性的第一值确定所述象限刚性和均衡刚性在所述传感器参考系xy中的第二值,
[0056]-两个电学增益模块的组件,被配置以便分别确定与所述象限刚性的第二值相对应的所述象限命令和与所述第二均衡刚性值相对应的所述频率命令,
[0057]-所述tf换能器和所述tq换能器被配置以便向所述谐振器分别施加所述频率命令和所述象限命令。
[0058]
根据一个实施例,所述第一模块被配置以便根据所述电学角度并且根据由d换能器执行的对所述振动波在所述传感器参考系xy中的位置的测量确定所述振动波在所述波参考系x’y’中的位置,并且根据在所述波参考系中的位置估计所述象限刚性和均衡刚性的第一值。
[0059]
根据一个实施例,所述第二模块被配置以便通过施加等于由所述第一值定义的向量的两倍电学角度的角度的旋转来确定由所述第二值定义的向量。
[0060]
下面的描述提供了本发明的设备的几个示例性实施例,这些示例不限制本发明的范围。这些示例性实施例提供本发明的基本特征以及链接到考虑中的实施例的附加特征。
附图说明
[0061]
在下面的详细描述中并且参照附图,本发明将变得更好理解,并且本发明的其它特征、目的和优点将变得明显,附图给出了非限制性示例并且在附图中:
[0062]
图1(已经提及)示出了本发明应用于其的惯性传感器的谐振器的结构。
[0063]
图2说明了在内部质体上具有多个换能器的轴对称谐振器的一个示例。
[0064]
图3说明了在两个内部和外部质体上具有多个换能器的轴对称谐振器的一个示例。
[0065]
图4说明了根据现有技术的频率校正和象限偏置校正控制操作。
[0066]
图5说明了根据本发明的方法。
[0067]
图6说明了根据本发明的方法的一个变体。
[0068]
图7说明了用于实现根据本发明的方法的步骤b和c的一个优选实施例。
[0069]
图8说明了根据本发明的惯性传感器。
[0070]
图9说明了在陀螺仪中来自图8的根据本发明的惯性传感器的一个实施例。
[0071]
图10说明了在回转仪中来自图8的根据本发明的惯性传感器的一个实施例。
[0072]
图11说明了在混合模式的第二阶段期间来自图8的根据本发明的惯性传感器的一个实施例。
[0073]
为了清晰起见,在各个图中相同的元件将使用相同的附图标记。
具体实施方式
[0074]
对传感器的操作的深度分析示出了实现频率和象限偏置校正的困难来自tq和tf换能器位于传感器轴x和y上并且沿着传感器轴x和y而不沿着波轴x’y’操作。当频率和象限修剪控制操作被原样施加到一非零的电学角度振动的波时,所传送的均衡和象限刚性与将被施加到换能器的值相对应,该换能器位于波参考系的轴x’y’上并且沿着该轴x’y’操作。然而,这些换能器被固定并且沿着传感器的轴x和y被定位。由第一和第二控制操作传送的刚性值因此对于沿着x’的振动不是最优的。根据本发明的方法目的在于传送针对tq和tf的有效命令ctq和ctf,也就是适合于电学角度的值的命令,而与其值无关。
[0075]
而且,两种模式之间的频率差异以及象限偏置随着振动的电学角度变化,并且由于传感器的非线性,要进行的校正也根据该角度变化。
[0076]
最后,当角度随着时间改变时,由于缺陷取决于角度,因此不再可能在长时间上执行滤波,因为误差的动力学很快。
[0077]
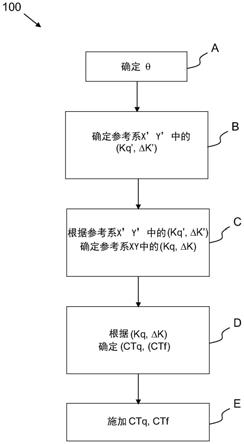
为了解决这一问题,本发明涉及用于确定针对由惯性角度传感器的谐振器res生成的振动波的象限命令ctq和频率命令ctf的方法100,所述方法在惯性传感器以沿着轴x’振动的振动波操作(以电学角度θ为特征)时应用,图5中说明了该方法的各种步骤。
[0078]
本发明所应用的惯性传感器包括如在现有技术中描述的谐振器,其具有平面和关于彼此垂直的、限定传感器参考系xy的两个轴x和y的轴对称结构并且包括两个移动质体m1和m2,其一个位于另一个周围定位,通过耦合弹簧耦合到彼此并且被配置为以音叉模式振动并且在限定波参考系x’y’的方向x’上相位相反。
[0079]
谐振器包括由电压控制的并且沿着两个轴x和y操作的多个静电换能器,至少包括在两个质体中的一个上的以下换能器:
[0080]
–
被称为e换能器的一对激励换能器,被配置以便经由幅度命令将波保持在恒定的幅度,保持波平面,并且在必要时,经由旋进命令旋转所述振动波,
[0081]-被称为d换能器的一对检测换能器,被配置以便检测所述振动波的移动,
[0082]-被称为tq换能器的一对象限偏置补偿换能器,被配置以便经由象限命令ctq施加象限刚性,所述象限刚性被配置以便消除x’和y’之间的耦合刚性,
[0083]-被称为tf换能器的一对频率调节换能器,被配置以便经由频率命令ctf施加均衡刚性,所述均衡刚性被配置以便消除x’和y’之间的刚性差异以便使所述振动波的谐振频率在x’和y’上均衡。
[0084]
在第一步骤a中,确定电学角度θ。
[0085]
在第二步骤b中,根据第一控制操作trimq并且根据第二控制操作trimf分别估计象限和均衡刚性的第一值kq’以及δk’。这些值通过与根据现有技术工作的那些控制操作具有相同类型的控制操作来确定(除了随后将描述的一些差异),其“忽略”振动波沿着轴x’而非x振动的事实。被称为第一值的这些值kq’和δk’被认为在波参考系x’y’中被估计,由于在波沿着x’振动时,它们与通过控制操作传送的值相对应。它们与将有必要施加到tq和tf的值相对应,tq和tf沿着x’和y’操作。
[0086]
在下面的步骤c中,根据在步骤b中估计的所述刚性的第一值kq’、δk’来确定象限和均衡刚性在所述传感器参考系xy中的第二值kq、δk。被称为第二值的这些值kq、δk适合于tq和tf换能器沿着轴xy操作的事实。kq’和δk’因而被转换为kq和δk以便考虑施加均衡和象限刚性的缓冲器在传感器参考系xy而非在波参考系x’y’中操作的事实。换句话说,基于在波参考系x’y’中估计的值kq’和δk’,对这两项执行转换以便返回到其中运行修剪的传感器参考系xy。
[0087]
在步骤d中,按照传统方式确定分别与在步骤c中确定的第二值kq和δk相对应的象限命令ctq和频率命令ctf,并且最后,在步骤e中,施加在步骤d中确定的频率命令ctf和象限命令ctq。
[0088]
根据本发明的方法因而能够应用于使用与现有技术的操作具有相同类型的修剪控制操作的传感器。也就是说,不必开发新的控制操作,信号处理方面的差异是例如在方法步骤c中执行的由这些控制操作传送的刚性的转换。由于通过转换计算的刚性kq和δk的精确性,要求平面波被施加到e的力在稳态时返回到零,链接到施加这一力的误差被消除,并且经由tq和tf换能器执行了全部校正(频率和象限)。
[0089]
由于这一适应性,频率和象限误差被消除并且惯性传感器传送不再对刚性矩阵的
误差敏感的(速度或者角度)测量,而与波的振动角度θ的值无关。回忆到,根据本发明的方法被连续使用并且与传送关于感测轴z的角速度或者旋转角度的测量并行。
[0090]
通过实现根据本发明的方法,初始大致3hz的频率差异被带回到几个mhz,并且大致100
°
/s的象限误差被带回到小于0.1
°
/s。与来自在相位误差方面为100ppm类别的电子设备耦合的这些值使得能够实现小于每小时一度的漂移。
[0091]
根据一种变型,在惯性传感器操作在陀螺仪模式下操作时实现所述方法。在这种情况下,在步骤a中确定的电学角度θ等于经由旋进命令强加到振动上的角度θimp。能够使用θ的各种值来使误差平均,例如通过针对θ等于30
°
、接着等于60
°
,并且接着等于90
°
来执行测量。利用根据本发明的方法,这一实现变得在mems传感器上精确而有效。
[0092]
根据另一变型,在惯性传感器操作在回转仪模式中下操作时实现所述方法。接着,电学角度θ由惯性传感器的旋转产生并且从而被测量。在步骤a中确定的电学角度等于测量的旋转角度θm。
[0093]
根据再一变型,根据本发明的方法在图6中说明的混合模式中实现。
[0094]
所述方法包括其中电学角度描述多个电学角度θi的第一阶段,其中i是索引,这些通过施加旋进命令cp获得。步骤a到e针对每一个电学角度θ被连续实现。除了确定ctf和ctq,步骤d包括存储与每一个角度θi相关联的频率命令值ctfi的子步骤mem以及根据电学角度确定用于频率命令的变化法则ctf(θ)的子步骤mod。这一法则的形式典型地具有类型∑(akcos2kθ bksin2kθ),k典型地从0变化到4,并且对其进行确定在于根据对测量点θi执行的平滑来计算系数ak和bk的值。
[0095]
可以与传感器的操作模式即陀螺仪或者回转仪无关地实现这一第一阶段。优选地在陀螺仪模式下执行。当传感器操作在回转仪模式下时(典型地当其中嵌入有传感器的车辆处于静止时),通过发送旋进设置点来获得角度θi以便采取来自已知的当前角度的这一角度。第一阶段因而使得能够具有要根据电学角度的值施加的命令ctf的模型。
[0096]
在第二阶段中,惯性传感器操作在回转仪模式下,电学角度是自由的并且由惯性传感器的旋转产生,其测量值θm。
[0097]
第二阶段首先包括将第二控制操作trimf放置在开环中的步骤bo。在这一时刻,控制操作trimf停止实时传送命令ctf,由根据针对测量的旋转角度θm的变化法则确定的命令ctf(θ)代替。命令被随着时间施加,跟踪θm的变化。同时,测量两个波轴之间的谐振频率差异δf。频率修剪的原理主要在于发送测量δf的干扰并且接着经由ctf对其进行校正。当操作在开环模式下时,可能的是,能够继续发送干扰并且测量δf,但是不再施加校正ctf。
[0098]
只要谐振频率差异小于或者等于预定阈值s,就实现开环放置步骤bo。差异δf根据温度并且在老化期间改变。当频率差异δf变为大于阈值时,第二控制操作trimf被放置回到闭环中以便允许更新变化法则,在第一阶段重启。经过整个第二阶段,第一控制操作继续与在第一阶段中一样进行操作。这一混合模式表现出各种优点。
[0099]
当控制操作处于闭环模式下时,频率修剪向角速度测量注入噪声(因而在开环模式下操作的优点)。非侵入式象限修剪保留在闭环模式中。
[0100]
两种模式之间的频率差异随着角度改变。这不是简单的几何问题,在这种情况下,它将足够简单以便校正零角度频率差异,并且校正将适用于任何角度跟随旋转。还存在链接到非线性的频率差异,其具有校正根据角度改变的效果。
[0101]
当操作在回转仪模式下时,波被允许旋转。振动的角度因此可以潜在地快速改变,并且因此频率差异(待修正)可以快速地改变,并且因此频率操控操作trimf不得不具有与最大角速度一样高的带宽。对于这一控制操作,这提出了问题,信噪比非常低,并且有必要在长的时间上执行滤波以便实现有效的控制操作。这意味着不能够在长的时间上对频率差异进行滤波,导致在噪声的情况下显著的频率差异:因而能够在回转仪模式下在各种角度处执行频率修剪的优点。由于角度在陀螺仪模式下恒定,因此滤波可以持续更长。一旦识别了频率差异,就能够在开环模式中对它们进行修正并且改变回到回转仪模式。适应的命令接着被直接施加,跟踪δk的快速变化,因此与高动力学兼容。回转仪模式因而得益于陀螺仪模式下的频率修剪的结果。应该注意到,对于低的角速度,可以仍然实现回转仪模式下的频率修剪。
[0102]
在基于下面列出的矩阵计算的结果建立的实施例中,优选地实现步骤b和c,图7中说明了根据本发明的这一实施例的方法。
[0103]
在之前执行了参考系改变之后执行通过对控制操作trimf和trimwq的信号处理确定对(kq’,δk’)的步骤b,这是根据由换能器d执行的对振动波在传感器参考系xy中的位置(x,y)的测量并且根据电学角度θ确定振动波在波参考系x’y’中的位置(x’,y’)的子步骤b1的形式。因此情况是:
[0104]
x
′
=cosθ.x sinθ.y
[0105]y′
=-sinθ.x cosθ.y
[0106]
因而,对(x’,y’)被用作处理输入。
[0107]
在子步骤b2中,根据波参考系中的位置(x’,y’)估计象限和均衡刚性的第一值(kq’,δk’)。
[0108]
步骤c主要在于通过向具有作为坐标的第一值(kq’,δk’)的向量施加等于电学角度两倍的角度的旋转(即,2θ)来确定由第二值定义的向量,具有坐标(kq,δk)。
[0109]
因此通过矩阵关系表示对(kq’,δk’)到(kq,δk)的转换(坐标(kq,δk)被表示在参考系xy中):
[0110]
[数学式1]
[0111][0112]
即:kq=cos2θ.kq
′
sin2θ.δk
′
andδkq=-sin2θ.kq
′
cos2θ.δk
′
[0113]
这些转换关系被编程到控制操作中。理论上,一旦它们被带回到传感器参考系,值kq和δk是恒定的并且可应用于θ的所有值。然而,由于非线性,这些值取决于温度并且由于温度和传感器老化而随着时间可变,并且因此有必要实时地对它们进行重新计算。
[0114]
现在将说明如何获得关系数学式1。
[0115]
现在开始于在波参考系x’y’中表示的真实刚性矩阵k’。术语
“’”
将用于在波参考系中表示的值,并且不具有
“’”
的术语将用于在传感器参考系xy中表示的值。
[0116]
[数学式2]
[0117]
[0118]
这一刚性矩阵使用修剪梳状进行校正,使用下面的校正矩阵kc’:
[0119]
[数学式3]
[0120][0121]
最终刚性矩阵kf’等于:
[0122]
[数学式4]
[0123][0124]
对于良好的校正,情况在于:
[0125]
[数学式5]
[0126][0127]
一旦在参考系x’y’中确定了δk’和kq’(步骤b),需要在参考系xy中确定δk和kq(步骤c)。
[0128]
我们从校正矩阵kc’开始,校正矩阵kc’是将x’y’中表示的向量ve’转换为也在参考系x’y’中表示的向量vs’的线形应用:vs’=kc’ve’。
[0129]
期望确定相同的转换,其将被指代为kc,以便从参考系xy中的向量ve移动到也在参考系xy中表示的向量vs。
[0130]
r(θ)指代使得能够从参考系xy移动到参考系x’y’的旋转,v指代在参考系xy中表示的向量,并且v’是在参考系x’y’中表示的相同向量。是这种情况:
[0131]
[数学式6]
[0132][0133]
并且vs’=kc’·
ve’,即:
[0134]
[数学式7]
[0135]
r(θ)vs=kc
′
r(θ)ve
[0136]
vs=r(-θ)kc
′
r(θ)ve
[0137]
kc=r(-θ)kc
′
r(θ)
[0138]
并且因此:
[0139]
[数学式8]
[0140][0141]
即:
[0142]
[数学式9]
[0143][0144]
也能够将kc写为δk和kq的函数:
[0145]
[数学式10]
[0146][0147]
接着,能够识别项:
[0148]
[数学式11]
[0149]
kq=δk
′
sin2θ kq
′
cos2θ
[0150]
δk=δk
′
cos2θ-kq
′
sin2θ
[0151]
给出:
[0152]
[数学式12]
[0153][0154]
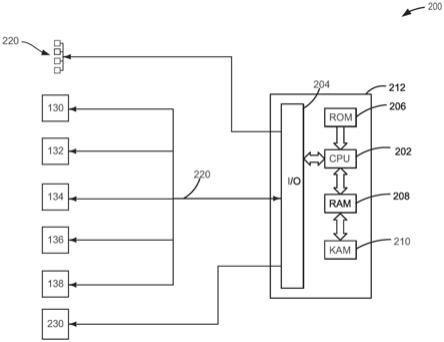
根据另一方面,本发明涉及一种在图8中说明的惯性角度传感器10,包括上面描述的谐振器res,谐振器res包括由电压控制的多个静电换能器并且沿着轴x和y操作,至少包括在两个质体中的一个上的换能器:通常被称为e换能器的一对激励换能器,通常被称为d换能器的一对检测换能器,通常被称为tq换能器的一对象限偏置补偿换能器,以及通常被称为tf换能器的一对频率调节换能器。
[0155]
象限刚性由第一控制操作trimq确定并且均衡刚性根据第二控制操作trimf确定。传感器还包括处理单元ut。单元ut被配置以便确定振动的电学角度θ。
[0156]
处理单元ut包括第一模块20,被配置以便根据第一控制操作trimq并且根据第二控制操作trimf分别估计象限和均衡刚性的第一值kq’和δk’,该第一值在波参考系x’y’中被估计。
[0157]
处理单元还包括第二模块21,被配置以便根据刚性的第一值kq’和δk’确定在传感器坐标xy中的象限和刚性的第二值δk和kq。
[0158]
单元ut还包括两个电学增益模块gq和gf的组件,这两个模块gq和gf被配置以便分别确定与象限刚性kq的第二值相对应的象限命令ctq以及与所述第二均衡刚性值δk相对应的频率命令ctf,tf和tq换能器被配置以便分别施加频率命令ctf和象限命令ctq。
[0159]
根据一个优选实施例,第一模块20被配置以便根据电学角度θ并且根据由d换能器执行的对振动波在传感器参考系xy中的位置(x,y)的测量来确定振动波在波参考系x’y’中的位置(x’,y’),并且根据在波参考系中的所述位置(x’,y’)估计象限和均衡刚性的第一值kq’和δk’。根据一个优选实施例,第二模块21被配置以便通过向其坐标是第一值的向量(kq’,δk’)施加等于电学角度两倍的角度2θ的旋转来确定其坐标是第二值的向量(kq,δk)。
[0160]
图9说明了在陀螺仪操作中来自图8的根据本发明的惯性传感器10的一个实施例。由施加到e换能器的旋进命令cp来提出角度θ。框20包括用于执行从传感器参考系xy到波参考系x’y’的参考系改变的模块2。模块2执行旋转r1(θ)。根据(x’,y’),通过使用根据现有技术的处理的元件进行处理来确定kq’和δk’:方框3等同于coq1,方框5等同于coq2,方框4等同于cof并且方框6等同于coq3。模块21执行如上面解释的旋转r2(2θ)。
[0161]
图10说明了在回转仪操作中来自图8的根据本发明的惯性传感器10的一个实施
例。角度θm是自由的并且被测量。经由传送旋转速度ω的模块7和积分器8按照传统方式测量θm。
[0162]
图11说明了在混合模式的第二阶段期间来自图8的根据本发明的惯性传感器10的一个实施例。控制操作trimf被放置在开环中,并且施加到tf换能器的命令来自其中存储有施加到角度θm的变化法则ctf(θ)的模块9。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。