1.本描述一般涉及用于操作和诊断包括传感器网络的系统的方法和系统。该方法和系统可被应用于验证传感器的操作而不必应用冗余传感器。
背景技术:
2.系统(诸如交通工具或机器)可包括用于报告系统的操作状况的多个传感器。个体传感器可提供关于特定组件的状态或操作状况的数据。例如,传感器(诸如加速度计)可输出挖土机或挖掘机的动臂(boom)的侧向(例如,y轴)加速度、纵向(例如,x轴)加速度、和竖直(例如,z轴)加速度数据。传感器数据可被应用于控制和限制交通工具的运动。然而,如果传感器的输出退化(例如,传感器输出偏离正由传感器监视的实际状况达期望量以上),则可能难以如可能期望的那样精确地控制交通工具。此外,传感器有时可能会执行自复位以补偿传感器漂移。但是,如果在实际传感器漂移较小时执行复位,则传感器输出的误差可能会增加。至少出于这些原因,可能期望验证传感器输出。验证传感器输出的一种方法是将传感器的输出与处于差不多的位置上的冗余传感器的输出进行比较。然而,冗余传感器会增加系统成本和复杂度。因此,可能期望提供一种验证传感器输出而无需向系统添加冗余传感器的方法。
技术实现要素:
3.本发明人已经认识到上述问题并开发了一种用于操作包括传感器阵列的系统的方法,包括:经由控制器将第一传感器的操作表征为处于多个传感器状态中的一者;经由控制器将多个传感器中的每一者的操作表征为处于该多个传感器状态中的一者;以及响应于第一传感器处于该多个传感器状态中的一者并且该多个传感器中的至少一者处于与该多个传感器状态中的所述一者不同的状态而经由控制器指示第一传感器退化。
4.通过将传感器操作表征在多个状态之一中,可以评估传感器阵列中特定传感器的操作而不必向系统添加冗余传感器。在一个示例中,所选传感器的操作可被表征为“静止”、“保持”或“活跃”。类似地,系统中另外两个传感器的操作也以相同的方式表征。所选传感器的退化可基于所选传感器的状态对比另外两个传感器的状态来评估。另外两个传感器被定位在系统的不同位置,并且这两个传感器提供基于它们在系统中的特定物理位置的输出数据。以此方式,一个传感器的操作可基于系统中的另外两个传感器的操作。这允许为系统中与所选传感器的位置不同的位置提供数据的传感器成为评估所选传感器的基础。
5.本说明书可以提供若干优点。特别地,该办法可降低系统复杂度和成本。此外,该办法可减少虚假的传感器退化评估的可能性。此外,该方法可在感知到传感器退化的情况下通过限制机器操作来提供改进的机器操作。
6.应该理解,提供以上概述以通过简化形式介绍以下详细描述中进一步描述的一些概念。这并不旨在标识所要求保护主题的关键或必要特征,所要求保护主题的范围由具体实施方式之后的权利要求书来唯一地限定。此外,所要求保护的主题不限于解决在上述或
本发明的任一部分中提及的任何缺点的实现。
附图说明
7.图1a-1c示出了包括传感器阵列的示例交通工具的若干视图;
8.图2是示例交通工具的控制系统的示意图;
9.图3-7示出了用于操作包括传感器阵列的系统的方法的流程图;以及
10.图8-13示出了根据图3-7的方法和图1a-2的系统的示例操作序列。
具体实施方式
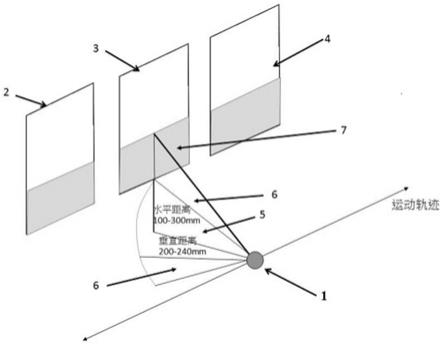
11.以下描述涉及用于操作包括传感器阵列的系统的系统和方法。传感器阵列可包括加速度计、陀螺仪、压力传感器、温度传感器、位置传感器、音频传感器、范围检测传感器、光传感器和其他类型的已知传感器。传感器阵列中所包括的一个传感器的输出可经由不紧邻这一个传感器的其他传感器的输出来估计。在一个示例中,被评估的传感器(例如,所选传感器)的输出被转换为角速率(例如,所感测的角速率),并且从这一个传感器确定的角速率与从不紧邻这一个传感器的两个不同传感器的输出确定的角速率(例如,参考角速率)进行比较。如果参考角速率偏离所感测的角速率达阈值量以上,则控制器可采取缓解动作。
12.图1a-1c示出了示例机器的若干视图,其中一个传感器的角速率输出数据与从两个“伙伴”传感器(例如,与验证所选传感器的操作相关联的传感器)确定的角速率输出进行比较。然而,应当领会,这里描述的系统和方法不限于图1a-1c中所示的机器类型。相反,本文所描述的系统和方法可被应用于其他机器或机构,诸如但不限于起重机、反铲挖土机、机动平地机、履带机、铲运机等。此外,本文所描述的方法和系统可被应用于除加速度计之外的传感器(例如,压力传感器、温度传感器、位置传感器等)。图2示出了用于自检传感器阵列网络的示例控制器。控制器电耦合到传感器和致动器。图3-7示出了用于操作包括传感器阵列网络的系统的示例方法的流程图。图8-13示出了用于操作传感器阵列网络和相关联的系统的示例序列。
13.图1a解说了示例机器100(例如,交通工具),示例机器100包括可用于确定其运动的多个传感器。在该示例中,机器100包括耦合到推进设备110(例如,驱动履带)的驾驶室100。驾驶室100可经由摆动齿轮112绕驱动履带110旋转。动臂132耦合到驾驶室100并且其可经由液压缸114相对于驾驶室100移动。臂106耦合到动臂104,使得臂106可绕动臂104枢转。液压缸116可延伸或缩回以使臂106绕动臂104枢转。工具108(例如,铲斗)耦合到臂106并且工具108可绕臂106枢转。液压缸118可延伸和缩回以使工具108绕臂106枢转。动力递送的方向是从驾驶室100经由各种经耦合组件(例如,动臂、关节(artic)、臂和工具)到工具108。因而,根据系统的动力递送方向,驾驶室100在工具108的上游。
14.机器100还包括用于确定其各种组件的运动的6轴加速度计阵列。具体而言,该阵列包括驾驶室俯仰和滚转传感器130、动臂传感器132、关节传感器134、臂传感器136、和工具传感器138。每个传感器可确定其被安装到的机器组件的角运动并经由旋转矩阵、四元数或欧拉角格式输出数据。传感器可经由x、y和z轴加速度计以及检测绕x、y和z轴加速度计的角运动的陀螺仪来确定角运动和加速度。陀螺仪允许针对可能由于加速度计物理结构和牛顿第三运动定律引起的传感器偏移来校正加速度计数据,以便传感器可输出如传感器测量
的更准确的倾斜角。
15.虽然陀螺仪提供可提高所确定的倾斜角的准确度的数据,但它们的读数或输出可能会随时间漂移。例如,当陀螺仪不移动或由于传感器漂移而以恒定速率移动时,由陀螺仪确定的运动速率可能会增加。如果传感器漂移增加得过多,则传感器的角变化率的准确度可能会退化,使得传感器的准确度可能会退化,类似于不包括陀螺仪校正的三轴传感器。每当传感器确定其为静止时,传感器便可执行陀螺仪偏移复位,使得可能由于漂移引起的偏移被从传感器的输出数据中移除。每当传感器输出恒定角速率输出时,传感器便可执行陀螺仪复位。在复位之后,传感器应用将传感器的角速率输出设置为零的偏移。但是,如果在传感器实际上正以恒定角速率移动时执行传感器复位,则传感器的角速率输出中的误差可能会增加,就像陀螺仪输出已漂移而没有补偿一样。因此,可能期望影响何时准许陀螺仪复位和/或在可能不期望传感器复位时执行传感器复位的情况下执行缓解动作。
16.图1a示出了以坐标系150为参考的机器100的侧视图。坐标系150的竖直轴151可被称为z轴。坐标系150的纵向轴152可被称为x轴。梯度角可位于x轴与z轴之间,如箭头155所指示。例如,梯度角可以是0
°
的值,并且梯度角可朝90
°
的值增大,如箭头155所指示。因而,如果驾驶室传感器130与驱动履带110下方的地面平行,则驾驶室传感器130可指示0
°
的梯度角。同样,可指示其他传感器的梯度值。
17.现在参考图1b,示出了机器100的平面图以解说回转角(slew angle)。图1a中所描述和编号的组件在图1b中用相同的数字指示。机器100的平面图以坐标系150为参考。坐标系150的纵向轴152可被称为x轴。坐标系150的侧向轴153可被称为y轴。回转角可位于x轴与y轴之间,如箭头156所指示。例如,回转角可以是0
°
的值,并且回转角可朝90
°
的值增大,如箭头156所指示。因而,如果图1a中所示的驾驶室传感器130与驱动履带110平行,则驾驶室传感器130可指示0
°
的回转角。同样,可指示其他传感器的回转角值。
18.现在参考图1c,示出机器100的后视图以解说斜面角(cant angle)。图1a中所描述和编号的组件在图1c中用相同的数字指示。机器100的后视图以坐标系150为参考。坐标系150的竖直轴151可被称为z轴。坐标系150的侧向轴153可被称为y轴。斜面角可位于z轴与y轴之间,如箭头157所指示。例如,斜面角可以是0
°
的值,并且斜面角可朝90
°
的值增大,如箭头157所指示。因而,如果图1a中所示的驾驶室传感器130与驱动履带110和地面垂直,则驾驶室传感器130可指示0
°
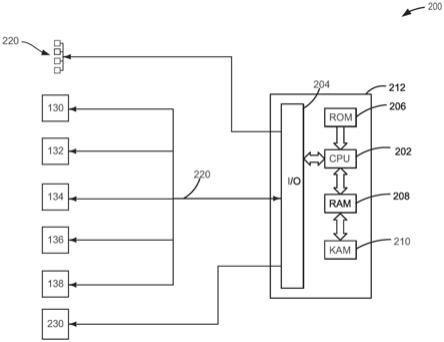
的斜面角。同样,可指示其他传感器的斜面角值。现在参考图2,示出了用于机器100的示例控制系统。控制器212可以与致动器220和传感器130-138电通信。致动器220可包括可调整机器100的操作状态的如图1a-1c所示的液压缸、用于控制液压缸的液压控制阀、电机(例如,马达)、气动机械等。控制器212可从人/机接口230(例如,触摸面板或显示器)接收数据并向人/机接口230提供数据。
19.控制器12可包括处理器202、只读存储器(非瞬态存储器)206、随机存取存储器208、和输入/输出205(例如,数字输入、数字输出、模拟输入、模拟输出、计数器/定时器、和通信端口)。控制器12可经由控制器局域网220与传感器130-138通信。替换地,控制器12可经由专用模拟或数字输入/输出与传感器130-138通信。此外,控制器12可经由控制器局域网220或经由专用输出信道与致动器220通信,如图2所示。
20.因而,图1a-2的系统提供了一种用于包括多个传感器的机器的系统,包括:多个经耦合组件,其包括耦合到该多个经耦合组件中的每一者的至少一个传感器;控制器,其包括
非瞬态计算机可读介质,该非瞬态计算机可读介质具有用于将耦合到该多个经耦合组件中的每一者的该至少一个传感器的操作表征成包括“静止”、“保持”和“活跃”的一组状态中所包括的一个状态的可执行指令、以及用于响应于所选传感器和另外两个传感器的状态而调整设备的可执行指令。该系统进一步包括用于响应于所选传感器和另外两个传感器的状态而启动定时器的附加可执行指令。该系统进一步包括用于响应于一个传感器的角速率变化超过阈值量而停用对耦合到该多个经耦合组件中的每一者的该至少一个传感器的诊断的附加可执行指令。该系统包括其中一个传感器的角速率在传感器监视算法的两个执行周期之间变化达阈值量以上。该系统进一步包括用于响应于一个传感器的角速率变化超过阈值量而激活对耦合到该多个经耦合组件中的每一者的该至少一个传感器的诊断的附加指令。该系统进一步包括用于进一步响应于由耦合到该多个经耦合组件中的每一者的该至少一个传感器中的一者或多者指示的运动角速率超过阈值速率而激活对耦合到该多个经耦合组件中的每一者的该至少一个传感器的诊断的附加指令。该系统进一步包括用于进一步响应于机器静止达阈值时间量而激活对耦合到该多个经耦合组件中的每一者的该至少一个传感器的诊断的附加指令。
21.现在参考图3-7,示出了用于操作包括传感器阵列的系统的方法的流程图。图3-7的方法可被结合到图1a-2的系统中并且可以与图1a-2的系统协作。此外,图3-7的方法的至少一部分可结合为存储在计算系统(例如,控制器212)的非瞬态存储器中的可执行指令,而该方法的其他部分可经由该计算系统变换物理世界中的设备和致动器的操作状态来执行。例如,计算系统可响应于传感器输出而告知操作员或暂时挂起机器的操作。图3-7的方法可经由控制器以预定时间间隔(例如,每10毫秒)执行。
22.在302,方法300从传感器阵列中的每个传感器接收或导入数据。传感器数据可经由控制器经由模拟输入、数字输入或串行/并行或网络输入接收。每次执行方法300时从传感器导入数据。因而,对于每10毫秒执行方法300的系统,相同传感器的两个毗邻传感器数据样本之间的时间量为10毫秒,这可等于方法300的执行周期之间的时间量。方法300行进至304。
23.在304,方法300将来自传感器的倾斜角数据从它们的0-360度值转换为范围在-180度到180度之间的值。在一个示例中,从每个传感器的倾斜角数据中减去180度以将每个传感器所提供的倾斜角转换至-180到180度的范围。方法300行进至306。
24.在306,方法300选择从动臂传感器输入到控制器的数据。方法300行进至308。
25.在308,方法300判断当前选择的传感器是否已被倒置地安装。在一个示例中,方法300可基于经由工程师为特定机器或交通工具模型执行类配置而输入到控制器的配置来判断所选传感器是否被倒置地安装。如果方法300判断当前选择的传感器已被倒置地安装,则答案为是并且方法300行进到310。否则,则答案为否,并且方法300行进到312。
26.在310,方法300反转当前选择的传感器的角速率值。在一个示例中,方法300经由定义outangleinplane=-inangleinplane来反转角速率值,其中inangleinplane是来自平面的传感器的数据并且outangleinplane是经调整的角速率值。方法300行进至312。
27.在312,方法300将所选传感器的局部传感器坐标系中的角速率转换为全局机器坐标系中的角速率。所选传感器输出绕其x、y和z轴中的每一者的角速率。所选传感器的角速率可经由以下矩阵方程确定:
[0028][0029][0030][0031][0032]
其中,θ是梯度角,而是斜面角,x
global
是机器或交通工具的x轴,y
global
是机器或交通工具的y轴,而z
global
是机器或交通工具的z轴,x
local
是所选传感器的x轴,y
local
是所选传感器的y轴,而z
local
是所选传感器的z轴。方法300行进至314。
[0033]
在314,方法300判断所有传感器的输出是否已被转换至机器的全局坐标系。如果是如此的话,则答案为是,并且方法300行进到316。否则,则答案为否,并且方法300行进到309。
[0034]
在309,方法300选择要转换坐标的下一传感器。例如,如果驾驶室位置传感器的角速率已被转换至全局机器坐标,则接下来可转换动臂传感器的输出数据。方法300返回到308。
[0035]
在316,方法300选择来自动臂传感器的角数据。方法300行进至318。
[0036]
在318,方法300将机器或交通工具的x、y和z轴上的角速率转换为梯度角速率、斜面角速率和回转角速率。所选传感器的角速率可经由以下矩阵方程确定:
[0037][0038][0039][0040][0041]
其中,γ是回转角,g
angular_rate
是机器或交通工具的梯度角速率,c
angular_rate
是机器或交通工具的斜面角速率,而s
angular_rate
是机器或交通工具的回转角速率。方法300行进至
320。
[0042]
在320,方法300判断轴角速率是否已被转换至梯度、斜面和回转。如果是如此的话,则答案为是,并且方法300行进到322。否则,则答案为否,并且方法300行进到319。
[0043]
在319,方法300选择要转换坐标的下一传感器。例如,如果动臂传感器的全局角速率已被转换至梯度、斜面和回转,则接下来可转换动臂传感器的输出数据。方法300返回到318。
[0044]
在322,方法300确定驾驶室倾斜角。动臂与机器驾驶室的角度(例如,动臂的参考组件)进行比较,以确定动臂倾斜传感器输出是否在有界的范围内。参考组件是位于最靠近包括所选传感器的组件上游的组件。参考组件的传感器被用于确定所选传感器是否正在参考组件下游的组件的物理限制之外进行报告。为了达成这一点,两个组件之间的相对角度被确定。因而,驾驶室角度可经由以下等式确定:
[0045]
cabinclinationangle=anggradient
×
cos(γ) angcant
×
sin(γ)
[0046]
其中,cabinclinationangle为驾驶室倾斜角、anggradient为梯度角、angcant为斜面角、anggradient和angcant参数值可经由所选传感器被直接导入。方法300行进至324。
[0047]
在324,方法300选择从动臂传感器输入到控制器的数据。方法300行进至326。
[0048]
在326,方法300从所选传感器的倾斜角数据确定所选传感器的角速率。在所选传感器的倾斜角数据已从0-360度范围转换之后,所选传感器的倾斜角数据的范围可以从-180至180度。方法300可从图3的步骤304中取回所选传感器的倾斜角数据。方法300行进至328。
[0049]
在328,方法300判断倾斜传感器角速率是否大于第一阈值(例如,7.5度/秒的移动阈值)。如果是如此的话,则答案为是,并且方法300行进到329。否则,则答案为否,并且方法300行进到330。
[0050]
在329,方法300将组件状态设置为“活跃”。例如,如果所选传感器是动臂传感器,并且动臂角速率大于7.5度/秒,则动臂的状态可被设置为“活跃”。方法300行进至334。
[0051]
在330,方法300判断倾斜传感器角速率是否大于第二阈值(例如,1.1度/秒的移动阈值)。如果是如此的话,则答案为是,并且方法300行进到331。否则,则答案为否,并且方法300行进到332。
[0052]
在331,方法300将组件状态设置为“保持”。例如,如果所选传感器是动臂传感器,并且动臂角速率小于7.5度/秒且大于1.1度/秒,则动臂的状态可被设置为“保持”。方法300行进至334。
[0053]
在332,方法300将组件状态设置为“静止”。例如,如果传感器是动臂传感器,并且动臂角速率小于1.1度/秒,则动臂的状态可被设置为“静止”。方法300行进至332。
[0054]
在334,方法300确定所有传感器的组件状态是否已被确定。如果是如此的话,则答案为是,并且方法300行进到336。否则,则答案为否,并且方法300行进到335。
[0055]
在335,方法300选择下一传感器,其中该下一传感器的倾斜角速率将被分类为“活跃”、“静止”或“保持”。例如,如果动臂传感器的倾斜角已被确定,则要分类的下一传感器的输出数据可以是关节传感器的输出数据。方法300返回到326。
[0056]
在336,方法300选择从动臂传感器输入到控制器的数据。方法300行进至338。
[0057]
在338,方法300从所选传感器的斜面角数据确定所选传感器的角速率。方法300可
从图3的步骤302中取回所选传感器的斜面角数据。方法300行进至340。
[0058]
在340,方法300判断所选传感器的斜面角速率是否大于第一阈值(例如,8.5度/秒的移动阈值)。如果是如此的话,则答案为是,并且方法300行进到342。否则,则答案为否,并且方法300行进到341。
[0059]
在341,方法300将组件状态设置为“活跃”。例如,如果所选传感器是动臂传感器,并且动臂角速率大于8.5度/秒,则动臂的状态可被设置为“活跃”。方法300行进至346。
[0060]
在342,方法300判断所选传感器的斜面角速率是否大于第二阈值(例如,0.2度/秒的移动阈值)。如果是如此的话,则答案为是,并且方法300行进到343。否则,则答案为否,并且方法300行进到344。
[0061]
在343,方法300将组件状态设置为“保持”。例如,如果所选传感器是动臂传感器,并且动臂斜面角速率小于8.5度/秒且大于0.2度/秒,则动臂斜面的状态可被设置为“保持”。方法300行进至346。
[0062]
在344,方法300将组件状态设置为“静止”。例如,如果所选传感器是动臂斜面传感器,并且动臂斜面角速率小于1.1度/秒,则动臂斜面传感器的状态可被设置为“静止”。方法300行进至346。
[0063]
在346,方法300确定对于所有平面而言组件状态是否已被确定。例如,方法300判断斜面角速率、回转角速率和梯度角速率是否已被表征为“静止”、“保持”或“活跃”。如果是如此的话,则答案为是,并且方法300行进到348。否则,则答案为否,并且方法300行进到347。
[0064]
在347,方法300选择下一平面,对于该下一平面而言所选传感器的平面角速率将被分类为“活跃”、“静止”或“保持”。例如,如果动臂传感器的斜面角已被表征为“活跃”、“静止”或“保持”,则接下来可选择动臂传感器的输出数据的回转速率来表征。方法300返回到340。
[0065]
在348,方法300判断是否已为所有传感器确定了组件状态。如果是如此的话,则答案为是,并且方法300行进到350。否则,则答案为否,并且方法300行进到349。例如,如果动臂传感器的组件状态已被表征为“保持”、“静止”或“活跃”,则臂传感器的输出数据可被选择以供表征为“保持”、“静止”或“活跃”。
[0066]
在349,方法300选择下一传感器以评估组件状态。例如,如果当前传感器是动臂传感器,则下一传感器可以是关节传感器。方法300返回到338。
[0067]
在350,方法300选择从动臂传感器输入到控制器的数据。方法300行进至352。
[0068]
在352,方法300判断如图4的326处确定的所选传感器的当前角速率是否小于所选传感器的紧接在前的角速率的25%。如果是如此的话,则答案为是,并且方法300行进到354。否则,则答案为否,并且方法300行进到358。方法300评估所选传感器的角速率以确定所选传感器的角速率是否在一个时间步长(例如,监视传感器网络中传感器的操作状态的控制器的执行间隔之间的时间)内已变化达其值的75%以上。传感器的这种操作可指示传感器被内部复位。此外,方法300可能需要角速率大于预定度数(例如,5度/秒)来确立传感器复位已经发生。
[0069]
在354,方法300将传感器复位标志(例如,控制器存储器中的字)设置为布尔真状态以指示被评估的所选传感器已经经历了内部复位。当传感器根据陀螺仪输出确定它没有
正在移动时,可如先前提到地激活内部复位以提高传感器准确度。方法300行进至356。
[0070]
在358,方法300判断所选传感器复位标志是否被设置为真状态。如果是如此的话,则答案为是,并且方法300行进到360。否则,则答案为否,并且方法300行进到356。
[0071]
在360,方法300判断所选传感器的当前角速率是否小于所选传感器的紧接在前的角速率值的25%。如果是如此的话,则答案为是,并且方法300行进到362。否则,则答案为否,并且方法300行进到356。此外,方法300也可能需要角速率大于预定度数(例如,5度/秒)并且机器已静止达预定时间量来确立传感器复位已经发生。换言之,在360,如果所选传感器的角速率指示在352确定的复位之后的复位,则可确定当前复位是所选传感器所作的校正复位并且所选传感器是再次完全操作的。
[0072]
在362,方法300将所选传感器的复位标志设置为假状态。方法300行进至356。
[0073]
在356,方法300判断所有传感器(例如,驾驶室、动臂、关节、臂和工具)的复位状态是否已被确定。方法300可在内部跟踪哪些传感器已针对复位进行了评估。如果方法300判断所有传感器的复位状态已被确定,则答案为是,并且方法300行进到366。否则,方法300行进至364。
[0074]
在364,方法300选择下一传感器以评估组件状态。例如,如果当前传感器是动臂传感器,则下一传感器可以是关节传感器。方法300返回到352。
[0075]
在366,方法300判断是否有任何组件复位标志被设置为真。如果是如此的话,则答案为是,并且方法300行进到368。否则,则答案为否,并且方法300行进到374。当传感器阵列中的所选传感器的梯度运动、回转运动、或斜面运动在如先前描述的本方法的执行之间变化达其先前值的75%以上时,传感器阵列中的所选传感器的组件标志之一可被设置为真。
[0076]
在368,方法300判断边界限制是否有效或者机器是否正在提升大于阈值重量。如果是如此的话,则答案为是,并且方法300行进到370。否则,则答案为否,并且方法300行进到372。边界限制可经由机器操作员输入,或者其可经由机器制造商预编程。边界限制可能要求回转、斜面和梯度的阈值角速度不被超过,以使得期望的机器操作可被提供。此外,边界限制可包括限制交通工具斜面和梯度值的阈值,使得期望的机器操作可被提供。
[0077]
在370,方法300停用传感器诊断并告知机器操作员暂时停止机器。机器操作员可经由人/机接口、可听声音或其他方式被告知。在一些示例中,控制器可经由命令一个或多个致动器(例如,电机、液压缸等)停止机器的移动来停止机器移动。替换地,当边界限制已被超过时,机器可以以预定速率被移动到预定位置。传感器诊断被暂时停用,使得传感器输出误差可能不会增加。通过经由操作员或经由控制器完全停止机器,每个传感器可被复位以移除来自相应传感器中的每一者的偏移误差。机器可在每个传感器已被复位之后恢复操作。指定传感器复位可降低传感器输出可能不如预期那么可靠的数据的可能性。在又一些其他示例中,机器可被允许继续操作,但以较低容量操作。例如,机器可能不被准许旋转超过预定速度。方法300行进至退出。
[0078]
在372,方法300暂时停用传感器诊断。传感器诊断可能被暂时停用,因为倾斜传感器数据可能不如预期那么可靠。停用传感器诊断可减少误报(false positive)错误的可能性。方法300行进至374。
[0079]
在374,方法300选择从动臂传感器输入到控制器的数据。方法300行进至376。传感器诊断可通过选择要评估的初始传感器(诸如动臂传感器)开始。
[0080]
在376,方法300为所选传感器选取“伙伴”传感器并确定相对倾斜角。相对倾斜角是两个组件之间的角度。在一个示例中,方法300根据通过机器的功率流的方向来将位于所选传感器的紧接着的下游的两个传感器选择为所选传感器的“伙伴”传感器。因而,如果动臂传感器是所选传感器,则关节传感器和臂传感器可被选择为伴随动臂传感器的“伙伴”传感器。如果这是不可能的,则方法300可选择所选传感器下游的下一个可用传感器作为“伙伴”传感器。如果不可能在所选传感器的下游找到两个“伙伴”传感器,则方法300可选择所选传感器的紧接着的上游的传感器。如果所选传感器位于机器的扭矩或能量传递机构(例如,图1a的工具传感器)的一端,则一个“伙伴”传感器可位于所选传感器的上游,并且所选传感器的陀螺仪的角速率可代替第二“伙伴”传感器来被使用。相对倾斜角可经由以下等式确定:
[0081]
relincang=refcomincang-incangss
[0082]
其中relincang是组件之间的相对倾斜角,refcomincang是参考组件倾斜角,而incangss是所选传感器的倾斜角。方法300行进至378。
[0083]
在378,方法300判断是否所选组件被表征为“静止”并且所选传感器的伙伴传感器中的任一者被表征为“活跃”,答案为是并且方法300行进到380。否则,方法300行进至379。以此方式,方法300确定所选组件的传感器(例如,动臂传感器)是否指示无移动水平或速率或者非常低的移动水平或速率,并且其“伙伴”传感器中的至少一者指示相对高的移动水平或速率。此类条件可指示所选传感器正输出可能小于预期的角数据,由此指示所选传感器可能退化(例如,所选传感器可能没有输出预期值)。
[0084]
在379,方法300递减与所选传感器相关联的低限位(stuck low)定时器的值。例如,如果低限位定时器值为0.1,并且时间递减为0.01秒,则可将低限位定时器中的值修订为0.09。低限位定时器可以是控制器存储器中的定时器,并且其可反映所选传感器的输出为低而其“伙伴”传感器的输出无需为低的时间量。方法300行进至382。
[0085]
在380,方法300递增与所选传感器相关联的低限位定时器的值。例如,如果低限位定时器值为0.1,并且时间递增为0.01秒,则可将低限位定时器中的值修订为0.11。低限位定时器可以是控制器存储器中的定时器,并且其可反映所选传感器的输出为低而其“伙伴”传感器的输出无需为低的时间量。方法300行进至382。
[0086]
在382,方法300判断是否所选组件被表征为“活跃”并且所选传感器的伙伴传感器中的两者均被表征为“静止”,答案为是并且方法300行进到384。否则,方法300行进至383。以此方式,方法300确定所选组件的传感器(例如,动臂传感器)是否指示高移动水平或速率,并且它的两个“伙伴”传感器均指示高移动水平或速率。如果是这样的话,则此类条件可指示所选传感器正输出可能大于预期的角数据,由此指示所选传感器可能退化(例如,所选传感器可能没有输出预期值)。
[0087]
在383,方法300递减与所选传感器相关联的高限位(stuck high)定时器的值。例如,如果高限位定时器值为0.1,并且时间递减为0.01秒,则可将高限位定时器中的值修订为0.09。高限位定时器可以是控制器存储器中的定时器,并且其可反映所选传感器的输出为高而其“伙伴”传感器的输出无需为高的时间量。方法300行进至386。
[0088]
在384,方法300递增与所选传感器相关联的高限位定时器的值。例如,如果高限位定时器值为0.1,并且时间递增为0.01秒,则可将高限位定时器中的值修订为0.11。高限位
定时器可以是控制器存储器中的定时器,并且其可反映所选传感器的输出为高而其“伙伴”传感器的输出无需为高的时间量。方法300行进至386。
[0089]
在388,方法300判断所选传感器的运动角速率是否大于预定物理限制(例如,10度/秒)。如果是如此的话,则答案为是,并且方法300行进到388。否则,方法300行进至387。以此方式,方法300确定所选组件的传感器(例如,动臂传感器)是否指示比可由与所选传感器相关联的组件实现的角运动速率更高的角运动速率。此类条件可指示所选传感器正输出可能大于可实现的角数据,由此指示所选传感器可能退化(例如,所选传感器可能没有输出预期值)。
[0090]
在387,方法300递减与所选传感器相关联的高角速率定时器的值。例如,如果高角速率定时器值为0.1,并且时间递减为0.01秒,则可将高角速率定时器中的值修订为0.09。高角速率定时器可以是控制器存储器中的定时器,并且其可反映所选传感器的输出高于可能预期的时间量。方法300行进至390。
[0091]
在388,方法300递增与所选传感器相关联的高角速率定时器的值。例如,如果高角速率定时器值为0.1,并且时间递增为0.01秒,则可将高角速率定时器中的值修订为0.11。方法300行进至390。
[0092]
在390,方法300判断所选传感器的倾斜角是否大于预定物理限制(例如,180度)。如果是如此的话,则答案为是,并且方法300行进到392。否则,方法300行进至391。以此方式,方法300确定所选组件的传感器(例如,动臂传感器)是否指示比可由与所选传感器相关联的组件实现的倾斜角更高的倾斜角。此类条件可指示所选传感器正输出可能大于可实现的倾斜角数据,由此指示所选传感器可能退化(例如,所选传感器可能没有输出预期值)。
[0093]
在391,方法300递减与所选传感器相关联的出界(out of bounds)定时器。例如,如果出界定时器值为0.1,并且时间递减为0.01秒,则可将出界定时器中的值修订为0.09。出界定时器可以是控制器存储器中的定时器,并且其可反映所选传感器的输出不在预期范围内的时间量。方法300行进至394。
[0094]
在392,方法300递增与所选传感器相关联的出界定时器的值。例如,如果出界定时器值为0.1,并且时间递增为0.01秒,则可将出界定时器中的值修订为0.11。方法300行进至394。
[0095]
在394,方法300判断先前提到的定时器中的任一者是否具有大于预定值的值。例如,方法300可判断诸定时器的值是否大于0.5秒。如果是如此的话,则答案为是,并且方法300行进到396。否则,则答案为否,并且方法300行进到398。
[0096]
在396,方法300可命令机器或交通工具致动器停止交通工具或机器的移动。在一个示例中,方法300可命令液压缸、电机、或气动设备停止移动,由此停止机器或交通工具的移动。另外,方法300可经由人/机接口告知交通工具或机器操作员诊断已指示传感器退化。在其他示例中,机器可被允许继续操作,但以较低容量操作。例如,机器可能不被准许旋转超过预定速度。方法300行进至398。
[0097]
在398,方法300判断是否已对所有传感器执行诊断。如果是如此的话,则答案为是,并且方法300行进到退出。否则,则答案为否,并且方法300行进到399。
[0098]
在399,方法300选择下一传感器以评估组件状态。例如,如果当前传感器是动臂传感器,则下一传感器可以是关节传感器。方法300返回到376。
传感器处于“活跃”状态。当轨迹806处于“h”水平时,第二伙伴传感器处于“保持”状态。当轨迹806处于“s”水平时,第二“伙伴”传感器处于“静止”状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹806表示第二“伙伴”所选传感器的状态。
[0107]
从图8顶部起的第四幅图是存储在低限位定时器中的值相对于时间的图。纵轴表示在低限位定时器中累积的时间量,并且该时间量在纵轴箭头的方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹808表示存储在低限位定时器中的时间量。水平线850表示当被低限位定时器超过时导致采取缓解动作(例如,暂时停用交通工具或机器)的阈值时间量。
[0108]
从图8的顶部起的第五幅图是交通工具或机器操作状态相对于时间的图。纵轴表示交通工具或机器的操作状态。当轨迹810处于横轴附近的较低水平时,交通工具或机器开启或正操作。当轨迹810处于纵轴箭头附近的较高水平时,交通工具或机器关闭或不操作。轨迹810表示交通工具或机器的操作状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。
[0109]
在时间t0,所选传感器状态、所选传感器的第一伙伴传感器的状态、以及所选伙伴传感器的第二伙伴传感器的状态全都正指示“活跃”状态。低限位定时器值为零且交通工具正在操作。
[0110]
在时间t1,所选传感器状态转变为“静止”,而所选传感器的第一伙伴传感器的状态和所选伙伴传感器的第二伙伴传感器的状态正指示“活跃”。因而,所选传感器输出与其预期输出相比变得退化。低限位定时器中的值开始增加并且交通工具保持被激活。
[0111]
在时间t2,低限位定时器中的值超过阈值850,这导致交通工具被停用。所选传感器状态保持“静止”,而所选传感器的第一伙伴传感器的状态和所选伙伴传感器的第二伙伴传感器的状态正指示“活跃”。
[0112]
以此方式,两个或更多个传感器的输出可根据传感器的运动来表征,并且对所选传感器的退化的指示可基于传感器的表征。如果所选传感器被指示为退化,则交通工具或机器可停止移动,或者其移动可能受到限制,使得其仅被准许以其最大速度的一小部分操作。
[0113]
现在参考图9,示出了可经由图1a-2的系统与图3-7的方法协作所提供的示例操作序列。特别地,图9示出了其中所选传感器的输出高于预期的示例操作序列。图9中的各图在时间上对齐并且同时发生。
[0114]
从图9的顶部起的第一幅图是所选传感器的操作状态相对于时间的图。纵轴表示所选传感器(例如,动臂传感器)的状态,并且当轨迹902处于“a”水平时,传感器处于“活跃”状态。当轨迹902处于“h”水平时,传感器处于“保持”状态。当轨迹902处于“s”水平时,传感器处于“静止”状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹902表示所选传感器的状态。
[0115]
从图9的顶部起的第二幅图是第一伙伴传感器的操作状态相对于时间的图。纵轴表示第一伙伴传感器(例如,关节传感器)的状态,并且当轨迹904处于“a”水平时,第一“伙伴”传感器处于“活跃”状态。当轨迹904处于“h”水平时,第一伙伴传感器处于“保持”状态。当轨迹904处于“s”水平时,第一“伙伴”传感器处于“静止”状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹904表示第一“伙伴”所选传感器的状态。
[0116]
从图9的顶部起的第三幅图是第二伙伴传感器的操作状态相对于时间的图。纵轴表示第二伙伴传感器(例如,臂传感器)的状态,并且当轨迹906处于“a”水平时,第二“伙伴”传感器处于“活跃”状态。当轨迹906处于“h”水平时,第二伙伴传感器处于“保持”状态。当轨迹906处于“s”水平时,第二“伙伴”传感器处于“静止”状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹906表示第二“伙伴”所选传感器的状态。
[0117]
从图9顶部起的第四幅图是存储在高限位定时器中的值相对于时间的图。纵轴表示在高限位定时器中累积的时间量,并且该时间量在纵轴箭头的方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹908表示存储在高限位定时器中的时间量。水平线950表示当被高限位定时器超过时导致采取缓解动作(例如,暂时停用交通工具或机器)的阈值时间量。
[0118]
从图9的顶部起的第五幅图是交通工具或机器操作状态相对于时间的图。纵轴表示交通工具或机器的操作状态。当轨迹910处于横轴附近的较低水平时,交通工具或机器开启或正操作。当轨迹910处于纵轴箭头附近的较高水平时,交通工具或机器关闭或不操作。轨迹910表示交通工具或机器的操作状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。
[0119]
在时间t5,所选传感器状态、所选传感器的第一伙伴传感器的状态、以及所选伙伴传感器的第二伙伴传感器的状态全都正指示“静止”状态。高限位定时器值为零且交通工具正在操作。
[0120]
在时间t6,所选传感器状态转变为“活跃”,而所选传感器的第一伙伴传感器的状态和所选伙伴传感器的第二伙伴传感器的状态正指示“静止”。因而,所选传感器输出与其预期输出相比变得退化。高限位定时器中的值开始增加并且交通工具保持被激活。
[0121]
在时间t7,高限位定时器中的值超过阈值950,这导致交通工具被停用。所选传感器状态保持“活跃”,而所选传感器的第一伙伴传感器的状态和所选伙伴传感器的第二伙伴传感器的状态正指示“静止”。
[0122]
现在参考图10,示出了可经由图1a-2的系统与图3-7的方法协作所提供的示例操作序列。特别地,图10示出了其中所选传感器的角速率输出高于预期的示例操作序列。图10中的各图在时间上对齐并且同时发生。
[0123]
从图10的顶部起的第一幅图是所选传感器的角速率相对于时间的图。纵轴表示所选传感器(例如,动臂传感器)的角速率,并且传感器的角速率在纵轴箭头方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1002表示所选传感器的角速率。水平线1050表示当被超过时导致高速率定时器递增的角速率阈值量。
[0124]
从图10顶部起的第二幅图是存储在高速率定时器中的值相对于时间的图。纵轴表示在高速率定时器中累积的时间量,并且该时间量在纵轴箭头的方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1004表示存储在高速率定时器中的时间量。水平线1052表示当被高速率定时器超过时导致采取缓解动作(例如,暂时停用交通工具或机器)的阈值时间量。
[0125]
从图10的顶部起的第三幅图是交通工具或机器操作状态相对于时间的图。纵轴表示交通工具或机器的操作状态。当轨迹1006处于横轴附近的较低水平时,交通工具或机器开启或正操作。当轨迹1006处于纵轴箭头附近的较高水平时,交通工具或机器关闭或不操
作。轨迹1006表示交通工具或机器的操作状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。
[0126]
在时间t10,所选传感器的角速率小于阈值1050。高速率定时器值为零且交通工具正在操作。
[0127]
在时间t11,所选传感器的角速率超过阈值1050,使得高速率定时器中的值开始增加。交通工具保持被激活。
[0128]
在时间t12,高速率定时器中的值超过阈值1050,这导致交通工具被停用。高速率定时器值停止增加。
[0129]
以此方式,交通工具或机器可响应于传感器的角速率超过阈值而被停止或以降低的容量操作。阈值可表示机器的最大容量。因而,传感器的输出可相对于机器的最大输出进行评估,而不是与处于差不多的位置上的其他传感器的输出进行比较。
[0130]
现在参考图11,示出了可经由图1a-2的系统与图3-7的方法协作所提供的示例操作序列。特别地,图11示出了其中所选传感器的倾斜角输出低于预期的示例操作序列。图11中的各图在时间上对齐并且同时发生。
[0131]
从图11的顶部起的第一幅图是所选传感器的倾斜角相对于时间的图。纵轴表示所选传感器(例如,动臂传感器)的倾斜角,并且传感器的倾斜角在纵轴箭头方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1102表示所选传感器的倾斜角。水平线1150表示当被倾斜角超过时导致采取缓解动作(例如,暂时停用交通工具或机器)的上阈值边界。水平线1152表示下阈值边界。如果倾斜角小于水平线1152的水平,则采取缓解动作。
[0132]
从图11顶部起的第二幅图是存储在出界定时器中的值相对于时间的图。纵轴表示在出界定时器中累积的时间量,并且该时间量在纵轴箭头的方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1104表示存储在出界定时器中的时间量。水平线1154表示当被出界定时器超过时导致采取缓解动作(例如,暂时停用交通工具或机器)的阈值时间量。
[0133]
从图11的顶部起的第三幅图是交通工具或机器操作状态相对于时间的图。纵轴表示交通工具或机器的操作状态。当轨迹1106处于横轴附近的较低水平时,交通工具或机器开启或正操作。当轨迹1106处于纵轴箭头附近的较高水平时,交通工具或机器关闭或不操作。轨迹1106表示交通工具或机器的操作状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。
[0134]
在时间t16,所选传感器的倾斜角大于阈值1152且小于阈值1150。出界定时器值为零且交通工具正在操作。
[0135]
在时间t17,所选传感器的角速率小于阈值1152,使得出界定时器中的值开始增加。交通工具保持被激活。
[0136]
在时间t18,出界定时器中的值超过阈值1154,这导致交通工具被停用。出界定时器值停止增加。
[0137]
以此方式,交通工具或机器可响应于倾斜角出界而被停止或以降低的容量操作。边界可表示机器的物理限制。因而,传感器的输出可相对于机器的物理边界条件进行评估,而不是与处于差不多的位置上的其他传感器的输出进行比较。
[0138]
现在参考图12,示出了可经由图1a-2的系统与图3-7的方法协作所提供的示例操作序列。特别地,图12示出了其中所选传感器的倾斜角输出高于预期的示例操作序列。图12中的各图在时间上对齐并且同时发生。
[0139]
从图12的顶部起的第一幅图是所选传感器的倾斜角相对于时间的图。纵轴表示所选传感器(例如,动臂传感器)的倾斜角,并且传感器的倾斜角在纵轴箭头方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1202表示所选传感器的倾斜角。水平线1250表示当被倾斜角超过时导致采取缓解动作(例如,暂时停用交通工具或机器)的上阈值边界。水平线1252表示下阈值边界。如果倾斜角小于水平线1252的水平,则采取缓解动作。
[0140]
从图12顶部起的第二幅图是存储在出界定时器中的值相对于时间的图。纵轴表示在出界定时器中累积的时间量,并且该时间量在纵轴箭头的方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1204表示存储在出界定时器中的时间量。水平线1254表示当被出界定时器超过时导致采取缓解动作(例如,暂时停用交通工具或机器)的阈值时间量。
[0141]
从图12的顶部起的第三幅图是交通工具或机器操作状态相对于时间的图。纵轴表示交通工具或机器的操作状态。当轨迹1206处于横轴附近的较低水平时,交通工具或机器开启或正操作。当轨迹1206处于纵轴箭头附近的较高水平时,交通工具或机器关闭或不操作。轨迹1206表示交通工具或机器的操作状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。
[0142]
在时间t20,所选传感器的倾斜角大于阈值1252且小于阈值1250。出界定时器值为零且交通工具正在操作。
[0143]
在时间t21,所选传感器的角速率大于阈值1250,使得出界定时器中的值开始增加。交通工具保持被激活。
[0144]
在时间t22,出界定时器中的值超过阈值1254,这导致交通工具被停用。出界定时器值停止增加。
[0145]
以此方式,交通工具或机器可响应于倾斜角出界而被停止或以降低的容量操作。边界可表示机器的物理限制。因而,传感器的输出可相对于机器的物理边界条件进行评估,而不是与处于差不多的位置上的其他传感器的输出进行比较。
[0146]
现在参考图13,示出了可经由图1a-2的系统与图3-7的方法协作所提供的示例操作序列。特别地,图13示出了其中传感器复位发生的示例操作序列。图13中的各图在时间上对齐并且同时发生。
[0147]
从图13的顶部起的第一幅图是所选传感器的角速率相对于时间的图。纵轴表示所选传感器(例如,动臂传感器)的角速率,并且传感器的角速率在纵轴箭头方向上增加。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1302表示所选传感器的倾斜角。水平线1350表示在时间t25的角速率的25%的角速率。
[0148]
从图13的顶部起的第二幅图是传感器复位标志的状态相对于时间的图。纵轴表示传感器复位标志的状态,并且当轨迹1304处于纵轴箭头附近的较高水平时,传感器复位标志为真。当轨迹1304处于水平轴附近的较低水平时,传感器复位标志为假。横轴表示时间,并且时间从图的左侧向图的右侧增加。轨迹1304表示传感器复位标志状态。
[0149]
从图13的顶部起的第三幅图是传感器诊断状态相对于时间的图。纵轴表示传感器诊断状态。当轨迹1306处于纵轴箭头附近的较高水平时,传感器诊断被激活。当轨迹1306处于水平轴附近的较低水平时,传感器诊断不被激活。轨迹1306表示传感器诊断操作状态。横轴表示时间,并且时间从图的左侧向图的右侧增加。
[0150]
在时间t25,角速率恒定,并且传感器复位标志为假,从而指示传感器尚未复位。复位传感器可能会导致从经由传感器的陀螺仪确定的角速率中减去一个恒定的角速率。诊断状态处于高水平,从而指示诊断算法是活跃的(例如,步骤374-399)。
[0151]
在时间t26,传感器基于角速率恒定而自行复位。然而,仅仅因为角速率是恒定的便复位传感器可能是不合需的。特别地,如果没有超过传感器的边界限制,则可能不期望复位传感器。因此,传感器诊断状态转变为未被置位。由于角速率值已减少达其在时间t25的原始值的75%以上,因此传感器复位标志也被置位。
[0152]
在时间t26与时间t27之间,角速率增加,并且随后其变为稳定值。传感器复位标志不改变,并且诊断状态不改变。
[0153]
在时间t27,角速率再次保持恒定,并且校正传感器复位被生成。作为结果,传感器复位标志未被置位,并且传感器诊断被重新激活。以此方式,传感器复位可导致传感器诊断被激活或暂时停用。
[0154]
要注意的是,本文包括的示例控制和估计例程可以与各种交通工具或机器系统配置一起使用。本文公开的控制方法和例程可以作为可执行指令存储在非暂时性存储器中,并且可以由包括与各种传感器、致动器和其它机器硬件结合的控制器的控制系统来执行。此外,方法的若干部分可以是在现实世界中采取的用以改变装置状态的物理动作。本文描述的特定例程可以代表任何数量的诸如事件驱动、中断驱动、多任务、多线程等的处理策略中的一个或多个。这样,所示出的各种动作、操作和/或功能可以以所示出的顺序、并行地来执行,或者在某些情况下被省去。同样,实现本文描述的示例性示例的特征和优点的处理顺序不是必要的,而是为了便于说明和描述而提供。取决于被使用的特定策略,可以重复地执行所示的动作、操作和/或功能中的一个或多个。此外,所描述的动作、操作和/或功能可以图形地表示待编程到引擎控制系统中的计算机可读存储介质的非暂时性存储器中的代码,其中所描述的动作通过在包括各种发动机硬件部件并且与电子控制器结合在一起的系统中执行指令来执行。如果需要,可以省略本文所述的一个或多个方法步骤。
[0155]
可以理解,本文公开的构造和例程本质上是示例性的,并且这些具体示例不应被认为是限制性的,因为可以进行多种变化。例如,上述技术可应用于起重机、挖掘机、铲运机和其他包括经链接或经耦合组件的系统。
[0156]
所附权利要求特别指出了被认为是新颖且非显而易见的某些组合和子组合。这些权利要求可能涉及“一个”元件或“第一”元件或其等同物。应当将这样的权利要求理解为包括一个或多个这样的元件的结合,既不需要也不排除两个或多个这样的元件。在本技术或相关申请中,可以通过修改本权利要求或通过提出新权利要求来主张所公开的特征、功能、元件和/或特性的其他组合和子组合。这样的权利要求,无论是在范围上与原始权利要求相比更宽、更窄、相同或不同,都被认为包括在本公开的主题范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。