技术特征:
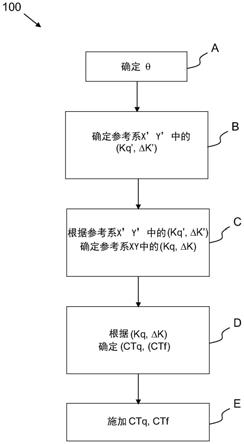
1.一种用于确定针对由惯性角度传感器(10)的谐振器(res)生成的振动波的象限命令(ctq)和频率命令(ctf)的方法(100),-所述谐振器(res)具有平面和关于彼此垂直的、定义传感器参考系xy的两个轴x和y的轴对称结构,并且包括两个振动移动质体(m1,m2),其一个位于另一周围定位,通过耦合弹簧耦合到彼此,并被配置以便在定义波参考系x’y’的方向x’上相位相反地振动,-所述谐振器还包括由电压控制的并且沿着两个轴x和y操作的多个静电换能器,至少包括在所述两个质体中的至少一个上的以下换能器;-被称为e换能器的一对激励换能器,被配置以便经由幅度命令(ca)将波保持在恒定的幅度,并且在必要时,经由旋进命令(cp)旋转所述振动波,-被称为d换能器的一对检测换能器,被配置以便检测所述振动波的移动,-被称为tq换能器的一对象限偏置补偿换能器,被配置以便经由象限命令(ctq)施加象限刚性,所述象限刚性被配置以便消除x’和y’之间的耦合刚性,-被称为tf换能器的一对频率调节换能器,被配置以便经由频率命令(ctf)施加均衡刚性,所述均衡刚性被配置以便消除x’和y’之间的刚性差异以便使所述振动波的谐振频率在x’和y’上均衡,所述方法在所述惯性传感器在以电学角度(θ)为特征的沿着x’振动的振动波操作时使用,所述方法包括步骤:-a确定所述电学角度(θ);-b分别根据第一(trimq)控制操作并且根据第二(trimf)控制操作估计所述象限刚性和均衡刚性的第一值(kq’,δk’),所述第一值在所述波参考系x’y’中被估计,-c根据在步骤b中估计的所述刚性的第一值(kq’,δk’)确定所述象限刚性和均衡刚性在所述传感器参考系xy中的第二值(kq,δk),-d确定分别与在步骤c中确定的所述第二值(kq,δk)相对应的所述象限命令(ctq)和所述频率命令(ctf),-e施加在步骤d中确定的所述频率命令(ctf)和所述象限命令(ctq)。2.根据权利要求1所述的方法,其中,所述惯性传感器在陀螺仪模式下操作,在步骤a中确定的所述电学角度(θ)等于经由所述旋进命令(cp)强加的角度(θimp)。3.根据权利要求1所述的方法,其中,所述惯性传感器在回转仪模式下操作,由所述惯性传感器的旋转产生的所述电学角度(θ)由所述惯性传感器测量,在步骤a中确定的电学角度等于测量的旋转角度(θm)。4.根据权利要求1所述的方法(100),包括:-第一阶段,其中所述电学角度描述通过施加所述旋进命令(cp)获得的多个电学角度(θi),步骤a到e是针对每个电学角度(θi)实现的,步骤d还包括存储相关联的频率命令值(ctfi)的子步骤(mem)以及根据所述电学角度确定所述频率命令的变化法则(ctf(θ))的子步骤(mod),-第二阶段,其中所述惯性传感器在回旋仪模式下操作,所述电学角度(θ)由于所述惯性传感器的旋转而自由并且由所述惯性传感器测量(θm),所述第二阶段包括:*将所述第二控制操作(trimf)放置在开环中的步骤(bo),被施加的所述频率命令接着根据针对所述测量的旋转角度(θm)的所述变化法则进行确定,
*检测谐振频率差异(δf)的步骤,只要所述谐振器频率差异小于或者等于预定阈值(s),所述开环放置步骤(bo)就被实现,*当所述频率差异(δf)大于所述阈值时,将所述第二控制操作(trimf)放置回闭环中的步骤,所述方法接着循环回到所述第一阶段以便更新所述变化法则。5.根据前述权利要求中的任意一项所述的方法,其中,步骤b包括:-根据对所述振动波在所述传感器参考系xy中的位置(x,y)的测量并且根据所述电学角度(θ)确定所述振动波在所述参考系x’y’中的位置(x’,y’)的子步骤b1,-根据所述波参考系中的所述位置(x’,y’)估计所述象限刚性和均衡刚性的第一值(kq’,δk’)的子步骤b2。6.根据前述权利要求中的任意一项所述的方法,其中,步骤c主要在于通过施加等于由所述第一值定义的向量(kq’,δk’)的两倍电学角度(2θ)的角度的旋转来确定由所述第二值定义的向量(kq,δk)。7.一种惯性角度传感器(10),包括:-具有平面和关于彼此垂直的、定义传感器参考系xy的两个轴x和y的轴对称结构的谐振器(res),并且包括两个振动移动质体(m1,m2),其一个位于另一周围定位,通过耦合弹簧耦合到彼此,并被配置以便沿着以电学角度(θ)为特征并且定义波参考系x’y’的方向x’上振动的振动波(dv)相位相反地振动,-所述谐振器还包括由电压控制的并且沿着两个轴x和y操作的多个静电换能器,至少包括在所述两个质体中的至少一个上的以下换能器;-被称为e换能器的一对激励换能器,被配置以便经由幅度命令(ca)将波保持在恒定的幅度,并且在必要时,经由旋进命令(cp)旋转所述振动波,-被称为d换能器的一对检测换能器,被配置以便检测所述振动波的移动,-被称为tq换能器的一对象限偏置补偿换能器,被配置以便经由象限命令(ctq)施加象限刚性,所述象限刚性被配置以便消除x’和y’之间的耦合刚性,-被称为tf换能器的一对频率调节换能器,被配置以便经由频率命令(ctf)施加均衡刚性,所述均衡刚性被配置以便消除x’和y’之间的刚性差异以便使所述振动波的谐振频率在x’和y’上均衡,-分别根据第一(trimq)控制操作和第二(trimf)控制操作确定所述象限刚性和均衡刚性,-所述传感器还包括处理单元(ut),其被配置以便确定所述电学角度(θ)并且包括:-第一模块(20),被配置以便分别根据所述第一(trimq)控制操作和所述第二(trimf)控制操作估计所述象限刚性和均衡刚性的第一值(kq’,δk’),所述第一值在所述波参考系x’y’中被估计,-第二模块(21),被配置以便根据所述刚性的第一值(kq’,δk’)确定所述象限刚性和均衡刚性在所述传感器参考系xy中的第二值(kq,δk),-两个电学增益模块(gq,gf)的组件,被配置以便分别确定与所述象限刚性的第二值(kq)相对应的所述象限命令(ctq)和与所述第二均衡刚性值(δk)相对应的所述频率命令(ctf),-所述tf换能器和所述tq换能器被配置以便向所述谐振器分别施加所述频率命令
(ctf)和所述象限命令(ctq)。8.根据权利要求7所述的惯性传感器,其中,所述第一模块(20)被配置以便根据所述电学角度(θ)并且根据由所述换能器执行的对所述振动波在所述传感器参考系xy中的位置(x,y)的测量确定所述振动波在所述波参考系x’y’中的位置(x’,y’),并且根据在所述波参考系中的位置(x’,y’)估计所述象限刚性和均衡刚性的第一值(kq’,δk’)。9.根据权利要求7和8中的任一项所述的惯性传感器,其中,所述第二模块(21)被配置以便通过施加等于由所述第一值定义的向量(kq’,δk’)的两倍电学角度(2θ)的角度的旋转来确定由所述第二值定义的向量(kq,δk)。
技术总结
一种用于确定针对由惯性角度传感器(10)的谐振器(Res)生成的振动波的象限命令(CTq)和频率命令(CTf)的方法(100),所述方法包括步骤:-A确定所述电学角度(θ);-B分别根据第一(TrimQ)控制操作并且根据第二(TrimF)控制操作估计所述象限刚性和均衡刚性的第一值(Kq’,ΔK’),所述第一值在所述波参考系X’Y’中被估计,-C根据在步骤B中估计的所述刚性的第一值(Kq’,ΔK’)确定所述象限刚性和均衡刚性在所述传感器参考系XY中的第二值(Kq,ΔK),-D确定分别与在步骤C中确定的所述第二值(Kq,ΔK)相对应的所述象限命令(CTq)和所述频率命令(CTf),-E施加在步骤D中确定的所述频率命令(CTf)和所述象限命令(CTq)。(CTf)和所述象限命令(CTq)。(CTf)和所述象限命令(CTq)。
技术研发人员:N
受保护的技术使用者:塔莱斯公司
技术研发日:2020.08.19
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。