1.本实用新型涉及机械领域,更具体地说,涉及一种转炉测温探头的对中装置。
背景技术:
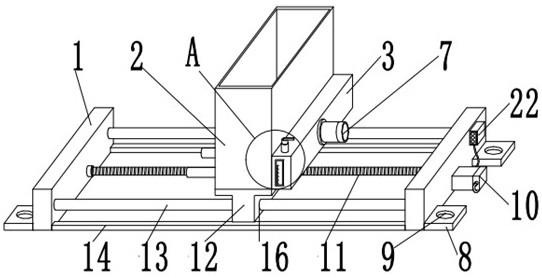
2.二炼钢转炉炉后测温枪采用自动装探头机器人替代人工操作以减轻员工的劳动强度,请结合图1所示,机器手1从左边的探头箱2取出探头,然后将探头搬送至右边测温枪3的下端,再将探头插入测温枪3的接插件里直至收到测温导通信号,测温完成后再将探头拔除。目前存在的问题是机器手在夹起探头插入测温枪3的接插件时存有对中不准的问题,导致测温探头无法准确插入接插件中,在设计之初已经考虑到了测温枪与机械手对中的问题,已经在测温枪导轨上安装了由气缸与导轮的夹紧装置,当机器手在装探头时,测温枪夹紧装置的气缸推动导轮,将测温枪夹住防止发生晃动以及位置的偏移。
3.请结合图2、图3所示,测温探头5的内径d1为28mm,接插件4的内径d2为18mm,测温探头5与接插件4之间在水平方向的位移误差d3不能超过5mm,在实际使用中接插件需要经常更换,每次更换完接插件其位置都会产生一定偏移,以及测温枪枪体的轻微变形也会导致其位置发生偏移,经过多次测量在水平方向的偏移距离多在10mm~50mm以内,超过了所允许的误差范围之内,导致探头无法安装。
技术实现要素:
4.针对现有技术中存在的上述缺陷,本实用新型的目的是提供一种转炉测温探头的对中装置,实现机器人所夹持的探头与测温枪接插件准确快速对中,提高探头安装成功率。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种转炉测温探头的对中装置,设于测温枪的接插件上,接入所述测温枪上气缸对中装置的气动回路,包括底座,设于所述底座上的左部夹持部件、右部夹持部件;
7.所述左部夹持部件包括左部夹持装置气缸,以及连于所述左部夹持装置气缸上的第一夹子组件;
8.所述右部夹持部件包括右部夹持装置气缸,以及连于所述右部夹持装置气缸上的第二夹子组件;
9.所述左部夹持装置气缸、所述右部夹持装置气缸接入的所述测温枪的气动回路;
10.所述左部夹持装置气缸的气路上连有减压阀;
11.所述第一夹子组件包括连于所述左部夹持装置气缸上的活塞杆上的第一夹子底座,以及连于所述第一夹子底座上的第一夹子本体;
12.所述第二夹子组件包括连于所述右部夹持装置气缸上的活塞杆上的第二夹子底座,以及连于所述第二夹子底座上的第二夹子本体。
13.较佳的,所述第一夹子本体的下端连于所述第一夹子底座上,所述第一夹子本体的上端分叉设置,形成y形。
14.较佳的,所述第一夹子本体的分叉端部均开有滑槽。
15.较佳的,所述第二夹子本体的下端连于所述第二夹子底座上,所述第二夹子本体的上端分叉设置,形成y形。
16.较佳的,所述第二夹子本体的分叉端部与所述第一夹子本体的分叉端部的滑槽相适配。
17.较佳的,所述第一夹子本体的下端、所述第二夹子本体的下端均开有散热孔。
18.较佳的,所述第一夹子本体的下端开有两个所述散热孔。
19.较佳的,所述第二夹子本体的下端开有一个所述散热孔。
20.本实用新型所提供的一种转炉测温探头的对中装置,能实现机器人在安装探头时,能使机器人夹持的探头与测温枪接插件准确对中,能够大幅度提高机器人自动安装探头的成功率。可以有效避免电缆损坏,结构简单。
附图说明
21.图1是现有自动装探头机器人安装测温枪探头的示意图;
22.图2是图1中测温枪探头与接插件对接的示意图;
23.图3是图2中测温枪探头与接插件对接的横截面示意图;
24.图4是本实用新型对中装置的使用状态示意图;
25.图5是本实用新型对中装置的示意图;
26.图6是本实用新型对中装置中左部夹持部件、右部夹持部件的示意图;
27.图7是图6中左部夹持部件、右部夹持部件接入原测温枪的气动回路的示意图;
28.图8至图14是本实用新型对中装置使用方法的示意图。
具体实施方式
29.为了能更好地理解本实用新型的上述技术方案,下面结合附图和实施例进一步说明本实用新型的技术方案。
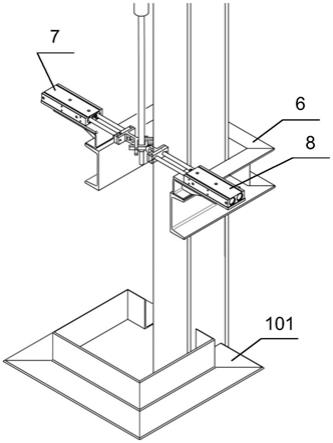
30.请结合图4所示,本实用新型所提供的一种转炉测温探头的对中装置,安装在现有测温枪的接插件100上距离平台101大概20cm的位置,并接入现有测温枪上气缸对中装置102的气动回路。
31.请结合图5和图6所示,本实用新型对中装置200包括底座6,安装于底座6上的左部夹持部件7、右部夹持部件8。
32.左部夹持部件7包括左部夹持装置气缸701,以及连于左部夹持装置气缸701上的活塞杆上的第一夹子组件。
33.第一夹子组件包括连于左部夹持装置气缸701上的活塞杆上的第一夹子底座702,以及连于第一夹子底座702上的第一夹子本体703。
34.第一夹子本体703的下端连于第一夹子底座702上,第一夹子本体703的上端分叉设置,形成y形。
35.第一夹子本体703的分叉端部均开有滑槽704。
36.第一夹子本体703的下端开有两个散热孔705。
37.右部夹持部件8包括右部夹持装置气缸801,以及连于右部夹持装置气缸801上的活塞杆上的第二夹子组件。
38.第二夹子组件包括连于右部夹持装置气缸801上的活塞杆上的第二夹子底座802,以及连于第二夹子底座802上的第二夹子本体803。
39.第二夹子本体803的下端连于第二夹子底座802上,第二夹子本体803的上端分叉设置,形成y形。
40.第二夹子本体803的分叉端部插入于第一夹子本体703的分叉端部的滑槽704内。
41.第二夹子本体803的下端开有一个散热孔804。
42.左部夹持装置气缸701和右部夹持装置气缸801均带有冷却气体吹扫功能。
43.第一夹子组件和第二夹子组件可采用q235a或q235b或45号钢制成。
44.请结合图7所示,左部夹持装置气缸701、右部夹持装置气缸801与现有测温枪上气缸对中装置102的电磁阀103进行控制,使得本实用新型对中装置200与现有气缸对中装置102一起动作。并在左部夹持装置气缸701的“夹紧”气路方向上增加了减压阀9,并将压缩空气压力设置为0.2mpa,再将现有测温枪上气缸对中装置102的气动回路三联件上的减压阀104压缩空气压力设置为0.7mpa,这样设置是为了让左部夹持部件7与右部夹持部件8在夹紧状态下,使右部夹持装置气缸801的推力大于左部夹持装置气缸701的推力,确保每一次夹紧动作右部夹持装置气缸801完全伸出,实现每次对中的位置是不变的。若左部夹持部件7与右部夹持部件8的推力相同,当气缸进行夹紧动作时,由于左部夹持部件7与右部夹持部件8的动作不能保证同步,所以气缸在夹紧的最终位置不是确定的,会有较大的误差。实施后,本实用新型对中装置200的夹紧接插件的水平位置的误差能控制在2mm以内,能满足机器人安装测温探头的要求。
45.本实用新型对中装置200使用方法如下:
46.1)机械手1移动至测温枪接插件100下部,左部夹持部件7与右部夹持部件8打开,如图8所示;
47.2)机械手1移动至测温枪接插件100下部到位,左部夹持部件7伸出,如图9所示;
48.3)左部夹持部件7伸出到位后,右部夹持部件8伸出,将测温枪接插件100固定,如图10所示;
49.4)机械手1将测温探头插入接插件100缓慢向上移动,如图11所示;
50.5)机械手1缓慢向上移动至预定位置后,左部夹持部件7与右部夹持部件8打开,如图12所示;
51.6)左部夹持部件7与右部夹持部件8打开后,机械手1继续将测温探头缓慢向上移动,直至安装到位,如图13所示;
52.7)测温探头安装到位,如图14所示。
53.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本实用新型,而并非用作为对本实用新型的限定,只要在本实用新型的实质精神范围内,对以上所述实施例的变化、变型都将落在本实用新型的权利要求书范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。