技术特征:
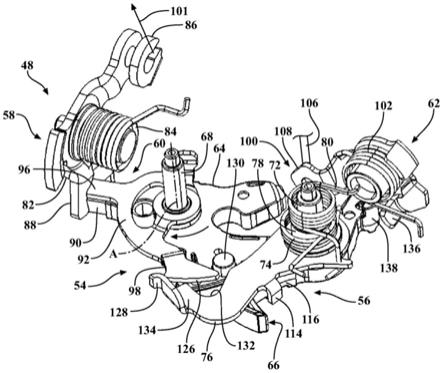
1.一种多关节液压机械臂,其特征在于:包括肩部旋摆机构(1)、大臂俯仰机构(2)、肘部俯仰机构(3)、前臂(4)、腕部俯仰摆动机构(5)、腕部旋转机构(6)和电液比例阀系统,所述肩部旋摆机构(1)、大臂俯仰机构(2)、肘部俯仰机构(3)、前臂(4)、腕部俯仰摆动机构(5)、腕部旋转机构(6)依次通过旋转关节连接,所述肩部旋摆机构(1)包括控制机械臂肩部旋摆动作的肩部旋摆油缸(9),所述大臂俯仰机构(2)包括控制机械臂大臂俯仰动作的大臂俯仰油缸(10),所述肘部俯仰机构(3)包括控制机械臂肘部俯仰动作的肘部俯仰油缸(12),所述腕部俯仰摆动机构(5)包括控制机械臂腕部俯仰动作的腕部俯仰油缸(13)及控制机械臂腕部摆动动作的腕部摆动油缸(14),所述腕部旋转机构(6)包括控制机械臂腕部旋转动作的液压马达(15),所述电液比例阀系统通过出油管路为所述肩部旋摆油缸(9)、大臂俯仰油缸(10)、肘部俯仰油缸(12)、腕部俯仰油缸(13)、腕部摆动油缸(14)及液压马达(15)提供液压油。2.根据权利要求1所述的一种多关节液压机械臂,其特征在于:所述电液比例阀系统包括上油箱(7)、设置于上油箱(7)上的蓄能器(8)及分布式内嵌于机械臂中的第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106),所述第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106)分别与上油箱(7)之间设置有对应连接的第一压力补偿模块(201)、第二压力补偿模块(202)、第三压力补偿模块(203)、第四压力补偿模块(204)、第五压力补偿模块(205)、第六压力补偿模块(206),所述第一压力补偿模块(201)、第二压力补偿模块(202)、第三压力补偿模块(203)、第四压力补偿模块(204)、第五压力补偿模块(205)、第六压力补偿模块(206)分别对所述第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106)的进出口压差进行补偿。3.根据权利要求2所述的一种多关节液压机械臂,其特征在于:所述第一压力补偿模块(201)、第二压力补偿模块(202)、第三压力补偿模块(203)、第四压力补偿模块(204)、第五压力补偿模块(205)、第六压力补偿模块(206)均包括定差减压阀(2011)和梭阀(2022),各所述定差减压阀2011分别与第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106)的进油管路对应连通,各所述梭阀(2022)分别安装在所述第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106)的出油管路上,所述第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106)的出油管路上分别安装有与对应所述梭阀(2022)电性连接的压力感应器。4.根据权利要求3所述的一种多关节液压机械臂,其特征在于:各所述定差减压阀2011分别与所述第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106)的进油口对应节流配合。5.根据权利要求2所述的一种多关节液压机械臂,其特征在于:所述第一比例换向阀(101)、第二比例换向阀(102)、第三比例换向阀(103)、第四比例换向阀(104)、第五比例换向阀(105)、第六比例换向阀(106)上均设置有阀芯位移监测器。
6.根据权利要求1所述的一种多关节液压机械臂,其特征在于:所述肩部旋摆油缸(9)、肘部俯仰油缸(12)、腕部俯仰油缸(13)、腕部摆动油缸(14)及液压马达(15)的进出油口处均设置有旋转接头(301)。7.根据权利要求1所述的一种多关节液压机械臂,其特征在于:所述大臂俯仰油缸(10)的进出油口处设置有油缸平衡阀(11)。8.一种前馈补偿的电液比例控制系统,其特征在于,包括如权利要求1~7任一项所述的多关节液压机械臂和用于控制所述多关节液压机械臂运动的电液比例控制方法,所述电液比例控制方法包括以下步骤:步骤一、构建电液比例阀系统模型,并采用pid控制器进行控制;步骤二、根据步骤一构建的所述电液比例阀系统模型,采用三状态前馈控制器对消系统闭环传递函数靠近虚轴的极点,当系统具有二阶振荡特性时,对消其二阶振荡因子;当系统具有一阶惯性特性时,对消其一阶惯性因子,令三状态前馈控制器为:b(s)=k
dr
k
vr
s k
ar
s2式中,k
dr
为三状态前馈位移增益,k
vr
为三状态前馈速度增益,k
ar
为三状态前馈加速度增益;通过采集电液比例阀系统负载的加速度和位移信号,同时合成等效的速度信号,形成对电液比例阀的三状态控制系统,采用极点配置原理对电液比例阀系统的闭环极点进行重新配置,控制电液比例阀系统频宽的扩展和系统稳定性;步骤三、根据电液比例阀系统出现的谐振峰特性构建结构滤波器,在所述三状态前馈控制系统中设置结构滤波器,通过所述结构滤波器对电液比例阀系统进行补偿,设计结构滤波器的中心频率和深度来抵消电液比例阀系统出现的谐振峰;步骤四、通过步骤二构建的三状态前馈控制系统和步骤三构建的结构滤波器形成混合控制系统,利用混合控制系统对电液比例阀系统进行位置伺服驱动。
技术总结
本发明涉及一种前馈补偿的电液比例控制系统及多关节液压机械臂,多关节液压机械臂包括肩部旋摆机构、大臂俯仰机构、肘部俯仰机构、前臂、腕部俯仰摆动机构、腕部旋转机构和电液比例阀系统,肩部旋摆机构、大臂俯仰机构、肘部俯仰机构、前臂、腕部俯仰摆动机构、腕部旋转机构依次通过旋转关节连接。本发明采用电液比例阀前馈补偿系统,设计分布式的比例阀模块,贴近执行机构布置,嵌于机械臂内部,同时为满足机械手高精度和高响应的要求,在比例系统PID控制的基础上,采用极点配置的方法对系统进行前馈补偿控制,增加系统的响应频宽,提高系统的响应速度。的响应速度。
技术研发人员:李俊 马亦鸣 乔岳坤
受保护的技术使用者:深海智人(广州)技术有限公司
技术研发日:2021.12.22
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。