1.本技术涉及激光切割机的领域,尤其是涉及一种双激光头切割机。
背景技术:
2.目前,激光切割技术由于其切割精度高,非接触性切割等特点,广泛应用于金属和非金属材料的加工中,不仅可减少加工时间,降低加工成本,还可以提高工件质量。随着应用的广泛,切割需求逐步多样化,切割工件的复杂性也越来越高。为保证切割的准确性和完全性,一般会进行两次重复切割。
3.针对上述中的相关技术,发明人认为激光切割机在处理复杂工件时存在效率低缺陷。
技术实现要素:
4.为了提高激光切割机在处理复杂工件时工作效率低的问题,本技术提供一种双激光头切割机。
5.本技术提供的一种双激光头切割机,采用如下的技术方案:
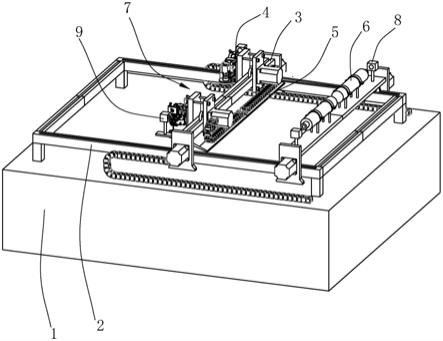
6.一种双激光头切割机,其特征在于:包括支撑底座、纵向导轨、操作横梁、激光切割组件和激光发生器;
7.所述纵向导轨有两条,对称固定连接在所在支撑底座上,所述操作横梁横架并滑移连接于所述两条纵向导轨;
8.所述激光切割组件有两套,并列滑移连接于所述操作横梁,两套所述操激光切割组件与支撑底座之间形成切割作业区;
9.所述激光发生器固定在所述支撑底座上,用于向所述切割组件发射激光。
10.通过采用上述技术方案,两组激光组件可同步工作,一组激光切割组件可作为另一组切割组件的补偿装置,修正前面切割作业未切割的部位,提高切割的工作效率。
11.优选的,所述激光切割组件包括横向移动部和固定连接于所述横向移动部的激光切割头,所述横向移动部包括横向滑轮,所述操作横梁上开设有供所述横向滑轮滑移的横向滑轨;所述横向移动部还连接有用于驱动横向滑轮转动的横向驱动电机。
12.通过采用上述技术方案,激光切割组件与横向动部固定连接,横向移动部设有滑轮,操作横梁上设有供滑轮滑动的横向滑轨,在驱动电机的作用下带着激光切割头在操作横梁上往复移动进行切割工作,移动稳定可控。
13.优选的,至少一套所述激光切割组件设置有用于扫描切割工件的摄像头,所述摄像头可拆卸固定连接于所述激光切割头的一侧,并位于两个所述激光切割头之间。
14.通过采用上述技术方案,摄像头与激光切割头同步运动,能快速扫描到所需切割的花纹图案,提高切割的准确性,此外摄像头设置在两个激光切割头之间,可以使2个激光切割头均能在摄像头扫描的区域内作业,确保扫描和切割的完整度。
15.优选的,两套所述激光切割组件均设置有用于扫描切割工件的摄像头相机,所述
摄像头固定连接于两个所述激光切割头的一侧。
16.通过采用上述技术方案,两组激光切割组件可以同步扫描,同步进行切割作业;也可以先运行一组切割组件先启动扫描,另一组稍后启动对前面扫描的工件进行重复扫描再切割,如此能提高切割准确性。
17.优选的,所述操作横梁两端连接有纵向移动部,所述纵向移动部包括纵向滑轮;所述纵向导轨上开设有供所述纵向滑轮滑移的纵向滑槽,所述纵向移动部还连接有用于驱动所述纵向滑轮滑动的纵向驱动电机。
18.通过采用上述技术方案,操作横梁可以纵向滑移,带着激光切割组件纵向作业,增加作业范围,实现复杂的二维图案的切割。
19.优选的,所述激光发生器平行于操作横梁并安装在支撑底座上,所述激光发生器有两个,两个激光发生器的激光发射端的朝向相反;所述支撑底座上还设有与所述激光发射端朝向相对的第一反射镜,所述操作横梁两端均设有1个第二反射镜,所述第二放射镜将激光反射到激光切割头的激光接收端。
20.通过采用上述技术方案,利用反射镜改变激光路径,光路径不重复不相互干扰,并且设备结构紧凑,空间利用率高。
21.优选的,所述双激光头切割机还包括线槽,所述线槽呈履带样;所述操作横梁还固定连接有支撑架,所述线槽抵接在支撑架上。
22.通过采用上述技术方案,履带式的线槽一方面可将复杂的电线统一装载,方便维护;另一方面履带兼备伸缩性,在驱动激光切割组件做往复移动时,线槽随操作横梁移动而移动,电线拉伸收缩顺畅,外观整洁。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1、激光切割机可实现横纵作业,满足复杂二维图案切割需求,设置两组几个切割组件一方面提高切割效率,另一方面作为补偿机制,保证了切割完整性和准确性。
25.2、可拆卸设置扫描摄像头,可根据工件的复杂程度选择安装一个或两个摄像头,降低加工成本同时保证切割准确性的要求 。
26.3、通过设置反射镜调整光路路径,节省空间、降低成本。
附图说明
27.图1是本技术实施例1的立体结构示意图。
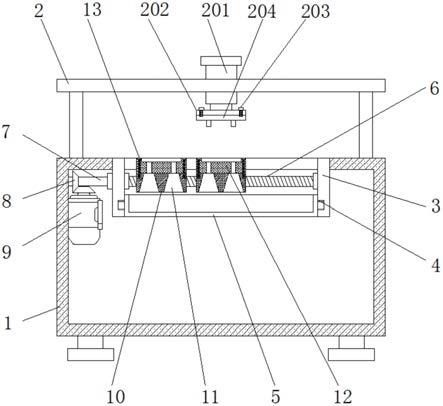
28.图2是本技术实施例1的立体图正视图。
29.图3是图2中a部分的局部放大图。
30.图4是本技术实施例1的立体图左视图。
31.图5是图4中b部分的局部放大图。
32.图6是本技术实施例1的立体图正视图。
33.图7是本技术实施例1的立体图的俯视图。
34.图8是图7中c部分的局部放大图。
35.图9是本技术实施例2的立体图的俯视图。
36.附图标记说明:1、支撑底座;2、纵向导轨;21、纵向滑槽;3、操作横梁;31、横向滑轨;32、支撑架;33、纵向滑轮;34、纵向移动部;35、纵向驱动电机;36、连接板;4、激光切割组
件;41、激光切割头;411、激光接收端;42、摄像头;411、激光接收端;43、横向移动部;44、横向滑轮;45、横向驱动电机;46、夹板;5、线槽;6、激光发生器;61、激光发射端; 7、切割作业区;8、第一反射镜;9、第二反射镜;d——激光发射光路路径。
具体实施方式
37.以下结合附图1
‑
9对本技术作进一步详细说明。
38.实施例1
39.本技术实施例公开一种双激光头切割机。
40.参照图1,一种双激光切割机包括支撑底座1、纵向导轨2、操作横梁3、激光发生器6和2套激光切割组件4;纵向导轨2安装在支撑底座1上,操作横梁3与[eee1] 2滑移连接,并可以在纵向导轨2长度方向上滑移;两套激光切割组件4均滑移连接于操作横梁3,并可在操作横梁3长度方向上滑移;两套激光切割组件4与支撑底座1之间形成了切割作业区7,激光发生器6固定在支撑底座1上,用于向激光切割组件4发射激光。
[0041]
参照图2,支撑底座1为激光切割机其他部件的安装基础;纵向导轨2有两条,通过焊接对称固定在支撑底座1上方,纵向导轨2沿其纵线中部开设有纵向滑槽21,供操作横梁3在纵向导轨2上做纵向滑移运动。2条纵向导轨2上均设有1个纵向移动部34,操作横梁3两端与纵向移动部34螺栓固定连接,纵向移动部34可使操作横梁3在纵向导轨2上移动。参考图3,纵向移动部34包括连接板36、纵向滑轮33和纵向驱动电机35;连接板36的一侧与操作横梁3的一端部螺钉固定连接,连接板36的另一侧与纵向驱动电机通过螺栓固定连接;纵向驱动电机35的驱动轴贯穿纵向连接板36与纵向滑轮33固定连接;纵向滑轮滑动抵接于纵向滑槽21。参照图2,操作横梁3横架在两条纵向导轨2上方,通过驱动电机35驱动纵向滑轮33转动,从而带着操作横梁3在纵向滑槽21上做纵向滑动。
[0042]
参照图4
‑
5,操作横梁3沿其纵线中部开设有横向滑轨31,供激光切割组件4在操作横梁3上做横向滑移运动。参照图5,激光切割组件4包括激光切割头41、摄像头42和横向移动部43,横向移动部43与激光切割头41固定连接,横向移动部43用于带着激光切割头41在操作横梁3上做横向运动;摄像头42与激光切割头可拆卸固定连接,用于扫描待切割工件上的图案。
[0043]
上述激光切割头在本实施例中还可以包括振镜,可以使切割作业时在一定区域内摆动,改变激光的方向,使切割更加精准。
[0044]
参照图5,横向移动部43包括两块夹板46、横向滑轮44和横向驱动电机45;两块夹板46分别用于连接激光切割组件和横向驱动电机,横向滑轮44与横向驱动电机45固定连接,横向驱动电机45用于驱动横向滑轮44转动。参照图5,两块夹板46分别置于操作横梁3两侧通过螺栓连接固定,一块夹板与激光切割头41螺栓固定连接,另一块夹板与横向驱动电机45螺栓固定连接,横向驱动电机45的驱动轴贯穿于与驱动电机连接的夹板46与横向滑轮44固定连接,横向滑轮44设置在两块夹板之间并抵接于横向滑轨31上。工作时,横向驱动电机45驱动横向滑轮44转动,带动夹板46,驱使激光切割头41在横向滑轨31长度上移动。参考图5,两套激光切割组件与支撑底座之间形成切割作业区7。
[0045]
参照图6,激光切割头41一侧与摄像头42螺栓固定连接,摄像头42位于两组激光切割头41之间,摄像头42朝向切割作业区7,辅助扫描待切割工件的图案,并通过数据传输同
步到控制系统。
[0046]
参照图6,激光发生器6有两个,相互对称固定在与操作横梁3平行的支架上,两个激光发生器6的激光发射端61朝向相反;支架上安装有第一反射镜8,第一反射镜8镜面朝向激光发射端61,第一反射镜8为45
°
反射镜,第一反射镜8可以将激光发生90
°
的反射;操作横梁3的两个末段分别设有一个凸台,在两个凸台上均设有一个第二反射镜9,第二反射镜9与第一反射镜8相对设置,第二反射镜9也是45
°
反射镜,第二反射镜9可以使激光再次发生90
°
的反射。参照图7
‑
8,激光切割头41上方设有激光接收端411,经第一反射镜8、第二反射镜9反射后的激光进入到激光接收端411。参照图7,d为激光从激光发射端61射出后到激光接收端411的光路路径。
[0047]
参照图7,激光切割组件4连接的电源线和数据线均装载在线槽5中,线槽5为履带样式,线槽5靠近横向驱动电机45设置,操作横梁3一侧上螺栓固定连接有支撑架32,线槽5抵接于支撑架32,使操作横梁3在纵向滑槽21移动的时线槽5可同步移动。
[0048]
切割工作时:两组激光切割组件4位于操作横梁3的一端,带有摄像头42的激光切割组件4先行运动,摄像头42先进行横向扫描,当扫描区域满足第二组激光切割组件4工作时,第二组激光切割头41启动切割作业,第一组激光切割组件4继续扫描至完毕,此后,第一组激光切割头相向第二组激光切割头运动启动切割作业,完成横向切割工作后,操作横梁3纵向滑移,重复横向扫描及切割作业。
[0049]
上述摄像头42与激光切割头41的连接方式在其他实施例还可以是卡扣的连接方式;支撑架32在其他实施例中可以是焊接固定在操作横梁3上。
[0050]
实施例1的实施原理为:通过横纵滑轨的设置,激光切割组件可以横纵作业,一组激光切割组件可以覆盖另一组激光切割组件的切割盲区及修正未切割部分,提高切割作业效率,摄像头设置在切割头之间,使得扫描范围均能被切割范围覆盖,确保了切割完整性。
[0051]
实施例2
[0052]
参照图9,本实施例与实施例1的不同之处在于,两组激光切割组件4上均设置有摄像头42,摄像头42可以分别固定连接在激光切割头41的同一侧,也可以设置在两个激光切割头41之间。
[0053]
第一种工作情况:两组激光切割组件4位于操作横梁3的一端,外侧激光切割组件4先行运动,摄像头42进行横向扫描,当扫描区域满足内侧的激光切割组件工作时,内侧的激光切割头41启动切割作业并重复扫描,第一组激光切割组件4继续扫描至完毕,第一组激光切割头41相向运动启动切割作业,完成横向切割工作后,操作横梁3纵向滑移,重复横向扫描及切割作业。
[0054]
第二种工作情况:两个摄像头42设置两个激光切割头41之间,在两组激光切割组件4位于操作横梁3的两端,两组激光切割组件4相向同步移动,扫描与切割同步进行,其中一组先结束作业,退回横梁一端,另一组继续修正扫描切割,直至横向作业完成,退回操作横梁3另一端,操作横梁3再纵向滑移重复横向切割作业。
[0055]
实施例2的实施原理为:增加摄像头42可以提高扫描的准确性及修正率。
[0056]
本技术提供一种双激光头切割机,激光切割组件在驱动电机的驱动下可以进行纵横切割作业,两组激光切割组件可以同步工作,也可以不同步工作,一组激光切割组件可以为另一组激光切割组件进行补偿修正作业,提高工作效率的同时保证切割准确性和完整
性。
[0057]
以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。