1.本实用新型涉布料切割技术领域,尤其是涉及一种具有视觉识别定位功能的焊切机。
背景技术:
2.现有的布料图案切割方式一般有人工裁剪和激光切割,人工进行裁剪布料的图案,花费时间长,裁剪完成后,剪口的地方还要进行加工程序处理,防止纤维不整齐及脱落。利用激光方式切割,需要将设计的图案输入到电脑系统中,在将布料染上深色后,放在激光扫描机的扫描光束下,将扫描的图案纹路,输入到电脑上,当布料的染色较浅时图案的纹路不清晰,无法将图案的正确的纹路扫描信息输入到电脑上,激光切割时,出现错误,导致布料报废。
技术实现要素:
3.基于此,为了防止人工裁剪时布料不整齐而易脱落,激光切割时,纹路定位不精确,导致布料报废的问题,旨在提供一种具有视觉识别定位功能的焊切机。
4.一种具有视觉识别定位功能的焊切机,包括工作平台、设于工作平台上的y轴移动台、悬设于工作平台上的x轴移动机构、设于x轴移动机构上并由x轴移动机构带动的电焊切割单元和视觉识别定位单元,所述x轴移动机构位于y轴移动台上方,所述工作平台上设有用于控制y轴移动台、x轴移动机构、视觉识别定位单元和电焊切割单元的qc控制器,所述视觉识别定位单元用于铺抓布料图案切割路径信息并将该信息反馈至qc控制器,所述qc控制器控制y轴移动台前后移动并控制x轴移动机构带动电焊切割单元左右移动,所述电焊切割单元根据y轴移动台和x轴移动机构移动的轨迹进行切割。
5.进一步的方案:所述y轴移动台包括固定于工作平台上的y轴导轨、滑设于y轴导轨上的第一滑块、固定于第一滑块上的切割台、与qc控制器电性连接的第一驱动装置,所述第一驱动装置输出端连接有第一丝杆,用于驱动第一滑块移动。
6.进一步的方案:所述x轴移动机构包括固定在工作平台上的支撑架、设于支撑架上的x轴导轨、滑设于x轴导轨上的第二滑块,所述第二滑块设有z轴移动机构,所述电焊切割单元设于z轴移动机构上,所述支撑架上设有驱动z轴移动机构的第二驱动装置。
7.进一步的方案:所述第二驱动装置的输出端连接有第二丝杆,所述第二丝杆上设有滑板,所述视觉识别定位单元固定在滑板的末端,所述z轴移动机构与滑板连接。
8.进一步的方案:所述z轴移动机构包括固定于滑板上的竖板,所述竖板上设有z轴导轨,所述z轴导轨上滑设有第三滑块,所述电焊切割单元固定在第三滑块上,且在滑板上设有驱动第三滑块上下移动的伺服电机。
9.进一步的方案:所述电焊切割单元包括固定在竖板上的夹具、以及由夹具夹紧的电焊笔,所述电焊笔与qc控制器电性连接。
10.进一步的方案:所述夹具设有缓冲组件,所述缓冲组件包括固定在第三滑块上的
竖直支撑板,在竖直支撑板上固定设有导向滑轨,所述导向滑轨上滑设有导向滑块,所述导向滑块设有与竖直支撑板平行的缓冲镀铬棒,所述缓冲镀铬棒一端与导向滑块连接,所述缓冲镀铬棒另一端与竖直支撑板连接,所述夹具固定在导向滑块上。
11.进一步的方案:所述视觉识别定位单元包括相机和led灯,所述led灯位于相机下方,所述相机与qc控制器电性连接。
12.与现有技术相比,本实用新型的有益效果是:通过视觉识别定位单元上的相机将工作台上的布料图案的信息收集反馈到qc控制器,qc控制器根据收集到的信息控制y轴移动台和x轴移动机构移动,同时控制电焊切割单元根据y轴移动台和x轴移动机构移动轨迹进行切割布料。电焊切割单元切割布料时,可将切割口处的纤维烫合,确保图案清晰且切割口整齐,纤维不会脱落,提高布料图案的精美度,同时通过视觉识别定位单元进行识别布料上图案,实时定位布料的切割路径,不需要将布料的图案输入到电脑内,降低了切割的错误,减少布料的报废,提高了工作效率以及良率。
13.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
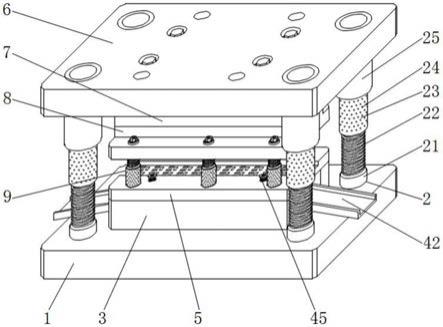
15.图1是本实用新型的立体结构示意图。
16.图2是本实用新型去掉图切割台后的立体结构示意图。
17.图3是本实用新型中y轴移动台的结构示意图。
18.图4是本实用新型中x轴移动机构的结构示意图。
19.图5是本实用新型中电焊切割单元和视觉识别定位单元装配的结构示意图。
20.图6是本实用新型中夹具和缓冲组件装配的结构示意图。
具体实施方式
21.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.于本文的描述中,需要理解的是,术语“上”、“下”、“右”、“左”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”,仅仅用于在描述上加以区分,并没有特殊的含义。
23.请参阅图1~2,本实用新型实施例中,一种具有视觉识别定位功能的焊切机,包括工作平台1、设于工作平台1上的y轴移动台2、悬设于工作平台1上的x轴移动机构3、设于x轴移动机构3上并由x轴移动机构3带动的电焊切割单元4和视觉识别定位单元5,x轴移动机构
3位于y轴移动台2上方,工作平台1上设有用于控制y轴移动台2、x轴移动机构3、视觉识别定位单元5和电焊切割单元4的qc控制器6,在工作平台1上还设有开关按钮7,视觉识别定位单元5用于铺抓布料图案切割路径信息并将该信息反馈至qc控制器6,qc控制器6控制y轴移动台2前后移动并控制x轴移动机构3带动电焊切割单元4左右移动,通过电焊切割单元4进行切割。为了焊切机工作时平稳,在工作平台1的底部四角设置有脚杯10。
24.具体的,视觉识别定位单元5包括相机50和led灯51,led灯5位于相机50下方,led灯5提高切割布料的清晰度,更好的保证相机50能过铺抓布料上的图案切割路径,相机50与qc控制器6电性连接。
25.综上,本实用新型通过视觉识别定位单元6上的相机50将工作台1上的布料图案的切割路径信息收集反馈到qc控制器6,qc控制器6根据收集到的信息控制y轴移动台2和x轴移动机构3移动,同时控制电焊切割单元4根据y轴移动台2和x轴移动机构3移动轨迹进行切割布料。电焊切割单元4切割布料时,可将切割口处的纤维烫合,确保图案清晰且切割口整齐,纤维不会脱落,提高布料图案的精美度,同时通过视觉识别定位单元5进行识别布料上图案,实时定位布料的切割路径,不需要将布料的图案输入到电脑内,降低了切割的错误,减少不布料的报废,提高了工作效率以及良率。
26.进一步的,请参阅图2和图3,y轴移动台2包括固定于工作平台1上的y轴导轨20、滑设于y轴导轨20上的第一滑块21、固定于第一滑块21上的切割台22、与qc控制器6电性连接的第一驱动装置23,第一驱动装置23输出端连接有第一丝杆24,用于驱动第一滑块21移动。具体的,在切割台22的底部设有连接板220,并在连接板220的底部固定安装有与第一丝杆24螺纹连接传动的推块221,在连接板220顶部两侧设有支撑板222,切割台22是放置在连接板220两侧的支撑板222上,且在两侧的支撑板222上均设有夹紧板223,夹紧板223通过胶头螺钉将切割台22固定在支撑板222上,可以方便切割台22的更换,不需要将整过y轴移动台2拆卸,提高更换的效率。
27.进一步的,请参阅图2和图4,x轴移动机构3包括固定在工作平台1上的支撑架30、设于支撑架30上的x轴导轨31、滑设于x轴导轨31上的第二滑块32,在第二滑块32设有z轴移动机构33,电焊切割单元4设于z轴移动机构33上,支撑架30上设有驱动z轴移动机构33的第二驱动装置34。
28.其中,第二驱动装置34的输出端连接有第二丝杆340,第二丝杆340上设有滑板341,视觉识别定位单元5固定在滑板341的末端,z轴移动机构33与滑板341连接。其中,第二驱动装置34的输出端设有主传动同步轮342,第二丝杆340通过固定块300可转动安装在支撑架30上,且第二丝杆340靠近第二驱动装置34的一端安装有从动同步轮343,在主传动同步轮342和从动同步轮343之间安装有同步带344,第二丝杆340的转动通过第二驱动装置34驱动主传动同步轮342带动同步带344,同步带344带动从动同步轮343,进而使得从动同步轮343带动第二丝杆340转动。
29.具体的,z轴移动机构33包括固定于滑板341上的竖板330,竖板330上设有z轴导轨331,z轴导轨331上滑设有第三滑块332,电焊切割单元4固定在第三滑块332上,且在滑板341上设有驱动第三滑块332上下移动的伺服电机333,进而使得第三滑块332带动电焊切割单元4上下移动。
30.进一步的,请参阅图5和图6,电焊切割单元4包括固定在竖板上的夹具40、以及由
夹具40夹紧的电焊笔41,电焊笔41与qc控制器6电性连接。当伺服电机333驱动第三滑块332带动电焊笔41向下移动时,为了避免撞坏电焊笔41,影响正常的切割,其中,夹具40设有缓冲组件400,缓冲组件400包括固定在第三滑块332上的竖直支撑板401,在竖直支撑板401上固定设有导向滑轨402,导向滑轨402上滑设有导向滑块403,导向滑块403设有与竖直支撑板401平行的缓冲镀铬棒404,缓冲镀铬棒404一端与导向滑块403连接,缓冲镀铬棒404另一端与竖直支撑板401连接,夹具40固定在导向滑块403上。
31.需要说明的是,第一驱动装置23和第二驱动装置34可以是普通型号的电机,也可以是伺服电机,本实用新型不做限定。
32.本实用新型的工作原理是:工作人员将需要切割的布料放置下切割台22上,相机50铺抓布料上图案的切割纹路,同时将铺抓的信息反馈到qc控制器6,qc控制器6根据反馈的切割纹路控制第一驱动装置23运作,使得第一丝杆34带动第一滑块21上的切割台22沿y轴导轨20前后移动,将切割台22上的布料移动到电焊笔41下方,此时,qc控制器6控制伺服电机333运作,使得第三滑块332带动电焊笔41沿z轴导轨331向下移动至布料处,同时qc控制器6根据反馈的切割纹路控制第二驱动装置34运作,使得第二丝杆340带动相机50和电焊笔41沿x轴导轨31左右移动,相机50跟随移动,能够实时的定位切割路径,确保切割路径的准确。
33.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。