1.本实用新型涉及马达制造的技术领域,特别涉及一种绕线机的送线张力机构。
背景技术:
2.随着社会的发展,人们生活质量的提高,对做为动力源的马达的要求越来越高,从而延生出用于不同行业的马达,如汽车行业,电动工具行业,无人机行业,家用电子设备行业等等。不同行业的马达,因为其用途不一样,有转子磁力线圈绕制在转子上的马达,有磁力线圈绕制在定子上的无刷马达,相应的就有了给转子绕线的绕线机,也有给定子绕线的绕线机。
3.绕线机在绕线过程中,通常需要借助张力器来动态调整铜线的松紧程度。普通的张力器基本是通过摆杆的摆动来收回绕线过程中松弛的铜线,这种结构收回铜线的长度很短,应用上存在局限性。
技术实现要素:
4.针对现有技术存在的问题,本实用新型的主要目的是提供一种绕线机的送线张力机构,旨在解决现有张力器的铜线调节长度过短的问题。
5.为实现上述目的,本实用新型提出的绕线机的送线张力机构,用于控制铜线在绕线过程中的张力,其包括基板、张力轮、第一过线轮和第二过线轮;
6.所述基板上设置所述基板上设置磁滞制动器,所述张力轮设置在所述磁滞制动器的输出轴上;
7.所述第一过线轮和所述第二过线轮上下滑动设置在所述基板上,且呈对角设置;铜线自所述张力轮缠入,经所述第一过线轮换向后缠入所述第二过线轮并送出;
8.所述基板上设置与所述第一过线轮和第二过线轮相对设置的第一弹性件和第二弹性件,所述第一弹性件和第二弹性件随送线过程中铜线的松紧程度产生不同程度的塑型变形。
9.可选地,所述基板上设置有线性滑轨,所述线性滑轨上设置第一滑动座和第二滑动座,所述第一过线轮和所述第二过线轮分别设置在所述第一滑动座和第二滑动座上。
10.可选地,所述线性滑轨的上下端分别设置固定座,所述第一弹性件的两端分别抵接上端的固定座和所述第一滑动座上,所述第二弹性件的两端分别抵接在下端的固定座和所述第二滑动座上。
11.可选地,所述线性滑轨的两侧分别设置第一导杆和第二导杆,所述第一滑动座靠近所述第一导杆的部分滑动套接在所述第一导杆上,所述第二滑动座靠近所述第二导杆的部分滑动套接在所述第二导杆上;
12.所述第一弹性弹套设在所述第一导杆上,所述第二弹性件套设在第二导杆上。
13.可选地,所述第一导杆上设置第一调节环,所述第一弹性件的两端分别抵接在所述第一滑动座上和所述第一调节环上;
14.所述第二导杆上设置第二调节环,所述第二弹性件的两端分别抵接在所述第一滑动座上和所述第二调节环上。
15.可选地,所述第一调节环的一侧设置第一刻度尺,所述第二调节环的一侧设置第二刻度尺。
16.可选地,所述线性滑轨的两侧分别设置第一调节气缸和第二调节气缸,所述第一调节气缸用于推动所述第一过线轮远离所述第二过线轮移动,所述第二调节气缸用于推动所述第二过线轮远离所述第一过线轮移动。
17.可选地,所述张力轮上设置有槽轮件,所述槽轮件的外周边缘具有多个沿其轴向均匀分布的凹槽;所述基板上设置有所述槽轮件相对设置的光电感应器。
18.可选地,所述张力轮为具有双线槽线轮,其进线侧下方设置有第三过线轮,铜线自所述张力轮的第一层线槽缠入,经所述第三过线轮后缠回所述张力轮的第二侧线槽,再缠入所述第一过线轮。
19.可选地,所述张力轮的进线侧设置有进线环和进线轮,铜线自所述进线环穿入,经过所述进线轮后缠入所述张力轮。
20.本实用新型采用磁滞制动器为张力轮提供光滑、无级可调、与转速无关扭矩控制,从而通过张力轮为铜线提供恒定张力,使得实时张力与设定张力保持一致,保证送线(绕线)过程中输出恒定张力保证线圈技术指标的一致性。
21.同时,通过在基板上设置能够上下滑动且呈对角设置的第一过线轮和第二过线轮,并在基板上设置与第一过线轮和第二过线轮相对设置的第一弹性件和第二弹性件,该第一弹性件和第二弹性件随送线过程中铜线的松紧程度产生不同程度的塑型变形,由此,能够快速自动调节铜线的缓冲长度,且调节的长度长。
附图说明
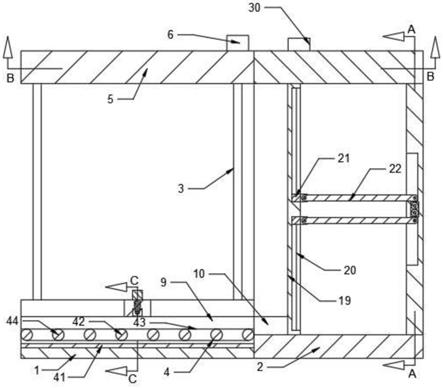
22.图1为本实用新型绕线机的送线张力机构一实施例的正面示意图;
23.图2为本实用新型绕线机的送线张力机构一实施例的立体示意图;
24.图3为本实用新型绕线机的送线张力机构一实施例的绕线示意图;
25.图4为本实用新型绕线机的送线张力机构一实施例中线性滑轨的结构示意图;
26.图5为本实用新型绕线机的送线张力机构一实施例中张力轮的结构示意图;
27.图6为本实用新型绕线机的送线张力机构一实施例中张力轮的分解示意图;
28.图7为本实用新型绕线机的送线张力机构一实施例中光电传感器与张力轮固定座的配合示意图。
具体实施方式
29.下面将结合本实用新型实施例中的中附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.请参阅说明书附图1
‑
7,在本实用新型实施例提出了一种绕线机的送线张力机构,用以控制铜线在绕线过程中的张力。具体地,该送线张力机构包括基板100、张力轮300、第
一过线轮500和第二过线轮600。
31.基板100为承载体,送线张力机构整体通过基板100安装固定在绕线机上。在基本的背面设置有磁滞制动器301,该磁滞制动器301的输出轴穿过基板100,张力轮300设置在其输出轴上。
32.第一过线轮500位于张力轮300的出线侧的下方,其滑动设置在基板100上,能够沿基板100的竖直方向上下滑动。第二过线轮600位于第一过线轮500的出线侧上方,与之与第一过线轮500呈对角设置。该第二过线轮600同样滑动设置在基板100上,且能够沿基板100的竖直方向上下滑动。
33.在第二过线轮600的出线侧下方设置出线环700,穿线时,铜线自张力轮300缠入,经第一过线轮500换向后缠入第二过线轮600,从出线环700穿出后进入绕线机构。
34.在基板100上设置与第一过线轮500和第二过线轮600相对设置的第一弹性件141和第二弹性件151,第一弹性件141和第二弹性件151随送线过程中铜线的松紧程度产生不同程度的塑型变形。
35.送线过程中,绕线机构牵引铜线,磁滞制动器301输出相应的恒定扭矩给张力轮300,张力轮300输出恒定的张力给到铜线,使铜线一直绷紧而又不会因张力过大而把铜线拉细。
36.并且,在送线过程中,第一过线轮500和第二过线轮600会根据铜线的松紧程度,上下滑动以自动调节铜线的缓冲长度。具体地,当铜线松弛时,第一弹性件141和第二弹性将能够分别向第一弹性件141和第二弹性件151之间反作用力,使得第一过线轮500和第二过线轮600向背动作,以快速回收松弛的铜线,使得铜线绷紧;当铜线绷地太紧时,在磁滞制动器301输出给张力轮300的张力不变的状态下,铜线拉动第一过线轮500和第二过线轮600相向动作,释放第一过线轮500和第二过线轮600之间缓冲的铜线,以放松铜线。
37.与现有技术相比,本实用新型采用磁滞制动器301为张力轮300提供光滑、无级可调、与转速无关扭矩控制,从而通过张力轮300为铜线提供恒定张力,使得实时张力与设定张力保持一致,保证送线(绕线)过程中输出恒定张力保证线圈技术指标的一致性。
38.同时,通过在基板100上设置能够上下滑动且呈对角设置的第一过线轮500和第二过线轮600,并在基板100上设置与第一过线轮500和第二过线轮600相对设置的第一弹性件141和第二弹性件151,该第一弹性件141和第二弹性件151随送线过程中铜线的松紧程度产生不同程度的塑型变形,由此,能够快速自动调节铜线的缓冲长度,且调节的长度长。
39.可选地,在本实用新型实施例中,该基板100上设置有线性滑轨110,线性滑轨110上设置第一滑动座111和第二滑动座112,第一过线轮500和第二过线轮600分别设置在第一滑动座111和第二滑动座112上。由此,以通过线性滑轨110来实现第一过线轮500和第二过线轮600的滑动设置。且线性滑轨110还能够减小第一过线轮500和第二过线轮600在移动过程的摩擦,减小机构内部的阻力,使得铜线的调节更加顺畅。
40.且,通过在线性滑轨110上设置第一滑动座111和第二滑动座112,方便借助一个线性滑轨110来实现第一过线轮500和第二过线轮600的滑动设置,简化机构的结构。
41.在本实用新型实施例中,在线性滑轨110的上下端分别设置固定座(120、130),上端的固定座120与第一滑动座111相对设置,下端的固定座130和第二滑动座112相对设置,将第一弹性件141设置在上端的固定座120和第一滑动座111之间,将第二弹性件151设置在
下端的固定座130和第二滑动座112之间。由此,第一弹性件141和第二弹性件151就能够在送线过程中根据铜线的松紧程度,向第一滑动座111和第二滑动座112提供相应的反张力。
42.更为具体地,在线性滑轨110的两侧分别设置第一导杆140和第二导杆150,将第一滑动座111靠近第一导杆140的部分滑动套接在第一导杆140上,将第二滑动座112靠近第二导杆150的部分滑动套接在第二导杆150上。第一弹性件141和第二弹性件151均采用的是金属弹簧,将两金属弹簧分别套设在第一导杆140和第二导杆150上,并使得金属弹簧的两端抵接在上端的固定座120和第一滑动座111、下端的固定座130和第二滑动座112之间。
43.第一导杆140和第二导杆150能够为金属弹簧向第一滑动座111和第二滑动座112施加反作用力提供便利,使其能够更好地为铜线提供反张力;且配合线性滑轨110还能够为第一滑动座111和第二滑动座112提供双重导向,使得第一滑动座111和第二滑动座112的滑动更加稳定,以适应更快速地送线场合。
44.作为优选地,在本实用新型实施例中,在第一导杆140和第二导杆150上还分别设置有第一调节环142和第二调节环152,第一弹性件141的两端分别抵接在第一滑动座111上和第一调节环142上,第二弹性件151的两端分别抵接在第一滑动座111上和第二调节环152上。由此,就能够通过调节第一调节环142和第一滑动座111之间的距离、通过第二调节环152和第二滑动座112之间的距离,调节第一弹性件141和第二弹性件151的初始压缩量来调节初始反张力,以适用不同的绕线要求。
45.可选地,在本实用新型实施例中,在第一调节环142的一侧设置第一刻度尺143,第二调节环152的一侧设置第二刻度尺153。由此,以为调节第一调节环142和第二调节环152提供基准参考。
46.优选地,在本实用新型实施例中,在线性滑轨110的两侧分别设置第一调节气缸160和第二调节气缸170,第一调节气缸160能够推动第一过线轮500远离第二过线轮600移动,第二调节气缸170能够推动第二过线轮600远离第一过线轮500移动。由此,可通过第一调节气缸160和第二调节气缸170快速驱动第一过线轮500和第二过线轮600相背动作以快速将松弛的铜线拉紧。
47.在本实用新型实施例中,该张力轮300包括张力轮本体310、槽轮件330以及盖板320,盖板320盖接在张力轮300的正面,槽轮件330设置在张力轮本体310,张力轮本体310随槽轮件330套接在磁滞制动器301的输出轴。该槽轮件330的外周边缘具有12个沿其轴向均匀分布的凹槽330a;基板100上设置有槽轮件330相对设置的光电感应器800,该光电感应器800通过安装座801设置在基板100上。该光电感应器800具有两个作用,第一检测铜线是否断线,第二记线长。具体而言,当槽轮件330的任意一凹槽330a转动至与光电感应器800相对时,光电感应器800发出一个信号,槽轮件330随张力轮本体310转动一圈,光电感应器800发出12个信号。由此,就能够通过记录送线过程中光电感应器800发出信号的次数来计算绕线周期中所用铜线的长度,并在线长超限时发出报警。
48.应当说明的是,槽轮件330的凹槽330a的数量可以根据实际需要计线长精度进行调整,并不局限于12个,可以为12个以上或以下。
49.与现有采用编码器计线长的方式相比,本实用新型通过光电传感器配合槽轮件330就能够实现计线长功能,经济实用,能够有效控制送线机构的成本。
50.可选地,在本实用新型实施例中,该张力轮本体310采用的是双线槽线轮,其进线
侧下方设置有第三过线轮400,铜线自张力轮300的第一层线槽缠入,经第三过线轮400后缠回张力轮300的第二侧线槽,再缠入第一过线轮500。
51.普通的张力机构的张力轮300采用单层穿线,铜线在里面多绕一圈才出来以防止线打滑,但第一圈的铜线与第二圈的铜线在张力轮300线槽内容易产生接触摩擦而损伤铜线的外漆皮,进而影响铜线的品质。通过采用双线槽线轮,能够有效避免第一圈铜线和第二圈铜线相接触。
52.此外,在本实用新型实施例中,在张力轮300的进线侧设置有进线环200和进线轮201,铜线自进线环200穿入,经过进线轮201后缠入张力轮300。进线环200能够防止铜线跳动,而进线轮201能够将铜线的滑动变为滚动,减少铜线与轮子的摩擦。
53.以上所述仅为本实用新型的优选实施例,并不用以本实用新型,凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同替换和改进,均应包含在本实用新型技术方案的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。