1.本发明涉及一种用于开关的驱动系统以及一种用于驱动开关的方法。
背景技术:
2.为了在不同的变压器中调节电压,存在多个用于不同任务并且具有不同要求的开关。为了操纵相应的开关,必须经由驱动系统驱动这些开关。这些开关尤其是有载分接开关、负载切换开关、选择器、双换向器、换向器或预选器。
3.用于上述开关中的一者的驱动装置例如由de 20 2010 011 521u1已知。在这个有载分接开关驱动装置中设置有马达,所述马达经由连杆与相应的有载分接开关刚性连接。借助于布线进行操纵,即,通过操纵马达接触器接通或关断马达。然后经由驱动轴操纵有载分接开关。在装配并且开始运行之后,不能在驱动装置上进行功能上的改变。由此,驱动装置变得呆板和不灵活。最简单的调整都需要复杂的改装措施。
技术实现要素:
4.因此本发明的任务是,给出一种用于驱动开关、特别是有载分接开关、负载切换开关、选择器、双换向器、换向器或预选器的改进的方案,通过所述改进的方案提高驱动的灵活性和在切换时的安全性。
5.所述任务通过包括权利要求1的特征的一种用于至少一个开关的驱动系统来解决。
6.本发明的另一个任务是,提供一种用于驱动至少一个开关的方法,所述方法提供用于驱动开关的改进的方案,通过所述改进的方案提高驱动的灵活性和在切换时的安全性。
7.所述任务通过包括权利要求14的特征的一种用于驱动至少一个开关的方法来解决。
8.按照本发明的驱动系统适合于至少一个开关并且包括驱动轴,所述驱动轴连接驱动系统与所述至少一个开关。设置有至少一个马达,所述马达与驱动轴耦联。设置有反馈系统,所述反馈系统设置为用于确定驱动轴的位置。基于所述位置产生反馈信号。控制装置设置为用于根据反馈信号从多个运转配置(fahrprofil)中选择一个存储的运转配置。所选择的运转配置相应地对马达产生作用。
9.所述控制装置包括控制单元和功率件,其中,所述功率件用于为所述至少一个马达供能。存储的运转配置保存在功率件的存储器中。备选地,运转配置保存在控制装置或控制单元的存储器中。
10.按照本发明的一种可行的实施方式,所述反馈系统包括至少一个绝对值编码器,所述绝对值编码器配置并设置为用于检测驱动轴的绝对位置或与驱动轴连接的另外的轴的绝对位置。基于所检测的位置可以产生至少一个输出信号,所述输出信号设置为用于根据所述至少一个输出信号求取驱动轴的位置。
11.所述绝对值编码器可以实施为多圈旋转编码器或单圈旋转编码器。
12.按照本发明的另一种可行的实施方式,所述绝对值编码器可以设置为用于根据第一探测方法检测驱动轴的位置或所述另外的轴的位置。所述探测方法可以是光学的、磁的、电容式的或感应式的探测方法。
13.按照本发明的一种实施方式,所述反馈系统可以包含至少一个绝对值编码器和辅助触点,所述辅助触点与所述绝对值编码器结合地配置并设置为用于,检测驱动轴的绝对位置或另外的轴的绝对位置。所述另外的轴与驱动轴连接。基于所检测的位置产生至少一个输出信号。根据所述至少一个输出信号求取驱动轴的位置。
14.所述绝对值编码器可以实施为单圈旋转编码器或增量编码器或虚拟编码器。辅助开关可以实施为至少一个微开关或旋变器。
15.所述运转配置通过两个变量限定并且表示为在二维笛卡尔坐标系中的n阶多项式函数。
16.按照本发明的另一种实施方式,所述驱动系统可以这样设计,使得控制装置作用到两个马达上。所述控制装置包括至少一个、可选地两个功率件,其中,每个马达都与一个共同的功率件配合作用,或每个马达与自身的功率件配合作用。
17.按照本发明,所述控制装置这样设计,使得所述控制装置与所述两个马达中的一个马达配合作用。所述马达运行经历另一个马达的反馈系统的实际值的运转配置。
18.按照本发明的用于驱动至少一个开关的方法的特征在于,驱动系统具有与至少一个马达连接的驱动轴。首先,在开始切换之前选择运转配置,所述运转配置描述驱动系统的为了从当前的开关位置切换到可达到的开关位置的运行。在驱动系统的运行期间以反馈系统检测所述至少一个马达的驱动轴的位置。从驱动轴的位置的所检测的实际值产生反馈信号。从比较驱动轴的位置的实际值与运转配置来求取:是否存在实际值与运转配置的偏差。在存在偏差的情况下这样控制所述至少一个马达,使得实际值与运转配置的偏差最小化。在达到可达到的开关位置时驱动系统停止。
19.按照本发明的方法的优点在于,通过使用运转配置能够实现在开关中切换时的高灵活性和可变性。在开关中的能够影响切换的机械改变通过使用运转配置来截获;因此能够相应地调整运转配置。
20.为用于驱动开关的驱动轴确定至少一个运转配置。通常确定用于一个开关的多个运转配置。将所确定的所述至少一个运转配置存储以用于在切换时使用。
21.以反馈系统的至少一个绝对值编码器确定驱动轴的绝对位置或另外的轴的绝对位置。其中,基于所检测的位置产生至少一个输出信号,利用所述输出信号求取驱动轴的位置。
22.控制装置包括控制单元和/或功率件,利用所述控制单元和/或功率件这样开环控制或闭环控制所述至少一个马达,使得在由运转配置预定的时间内达到要通过所述运转配置达到的开关位置。
23.所述运转配置中的每个运转配置都通过两个变量限定并且是二维的n阶多项式函数。所述多项式函数表示在二维笛卡尔坐标系中。
24.通过运转配置预定所述至少一个马达的速度或转矩。其中,通过所述运转配置也预定:在哪个时刻或在驱动轴的哪个位置中通过马达在驱动轴上实现什么转矩或什么速
度。
25.所述改进的方案基于如下构思:为用于驱动开关的驱动系统配备反馈系统和控制装置,由此能实现:经由确定的运转配置操纵开关。例如对有载分接开关的操纵通常这样进行,使得马达以恒定的转速操纵驱动轴,所述驱动轴使选择器触点平行地运动并且使弹性蓄能器张紧,所述弹性蓄能器在释放之后作用到负载切换开关上。根据改进的方案的驱动系统能够有针对性地、即根据预先选择的运转配置驱动所述驱动轴。所述运转配置不仅预定速度或转矩。所述运转配置也预定:在哪个时刻或在驱动轴的哪个位置中在驱动轴上实现什么转矩或什么速度。通过利用这种运转配置,可以影响开关的切换的有针对性的部段。因此能够根据驱动轴位置提高速度或转矩。因为在开关中在驱动轴上设置有不同的要操纵的部件,故可以明确地保护这些部件。因此,例如在切换的开始需要较高的转矩,以便使触点脱离或将所述触点置于运动中。紧接着然后可以减小转矩。这是以运转配置明确地可行的。经由反馈信号来将驱动轴的当前位置、即实际值与运转配置、即额定值相比较。因此,系统变得灵活并且安全。
26.术语“驱动轴的位置”包含如下测量参量,从所述测量参量可以(必要时在公差范围内)唯一地确定驱动轴的位置。
27.按照至少一种实施方式,所述驱动系统用于驱动开关、有载分接开关的轴或有载分接开关的相应的组件。由此使得有载分接开关实施一个或多个操作、例如在运行器件的两个绕组抽头之间切换或所述切换的部分,例如负载切换、选择器操纵或预选器操纵。
28.按照至少一种实施方式,所述驱动轴直接地或间接地、特别是经由一个或多个传动装置与开关、特别是与开关的轴连接。
29.按照至少一种实施方式,所述驱动轴直接地或间接地、特别是经由一个或多个传动装置与有载分接开关、特别是与有载分接开关的轴连接。
30.按照至少一种实施方式,所述驱动轴直接地或间接地、特别是经由一个或多个传动装置与马达、特别是与马达的马达轴连接。
31.按照至少一种实施方式,所述马达轴的位置、特别是绝对位置与驱动轴的位置相对应。亦即,可以从马达轴的位置(必要时在公差范围内)唯一地推断出驱动轴的位置。
32.按照至少一种实施方式,所述产生作用包含对马达的开环控制、闭环控制、制动、加速或停止。闭环控制可以包括例如位置控制、速度控制、加速度控制或转矩控制。至少在这样的闭环控制的情况下可以说,所述驱动系统是伺服驱动系统。
33.按照至少一种实施方式,所述驱动系统包括监控单元,所述监控单元设置为用于根据反馈信号监控开关的所述一个或多个操作。监控特别是包括如下监控:是否按照规定地、特别是在预定的时间窗内实施各个操作或部分。
34.按照至少一种实施方式,所述控制装置包括控制单元和用于受开环控制或受闭环控制地对马达供能的功率件。所述控制单元设置为用于驱控功率件。在功率件中保存有至少一个运转配置,所述运转配置由两个变量形成并且可以表示为在二维笛卡尔坐标系中的n阶多项式函数。
35.按照至少一种实施方式,所述功率件设计为变流器或伺服变流器或作为等效的用于驱动设备的电子单元、特别是纯电子单元。
36.按照不同的实施方式,所述控制装置完全地或部分地包含反馈系统。
37.所述驱动轴的绝对位置可以由控制装置例如进行比较。在偏差显著的情况下,控制装置可以输出错误消息或引入安全措施。
38.按照至少一种实施方式,所述反馈系统设置为用于,求取马达的转子位置并且根据所述转子位置确定针对驱动轴的位置的值。
39.按照至少一种实施方式,所述转子位置是如下角范围,马达的转子位于所述角范围中,所述角范围必要时与转子的完整旋转的数量相结合。
40.根据转子的设计方案、特别是根据转子的极对数,可以由此除至少180
°
外(例如通过控制装置)精确地确定马达轴的位置或绝对位置。通过借助于一个或多个传动装置的减速,显著提高驱动轴的位置的由此可达到的精度。通过控制装置进行的评估在这里在一定程度上相应于虚拟的编码器功能。并且因此在反馈系统的绝对值编码器完全失效的情况下也可以至少维持紧急运行和/或将有载分接开关置入到安全的位置中。
41.按照至少一种实施方式,所述反馈系统包含绝对值编码器,所述绝对值编码器配置并设置为用于,检测驱动轴的绝对位置或与驱动轴连接的另外的轴的绝对位置,并且基于所检测的位置产生至少一个输出信号。反馈系统设置为用于根据所述至少一个输出信号求取针对驱动轴的位置的值。
42.按照至少一种实施方式,所述绝对值编码器直接地或间接地固定在马达轴、驱动轴或与其耦联的轴上。
43.按照至少一种实施方式,所述绝对值编码器包括多圈旋转编码器或单圈编码器。
44.按照至少一种实施方式,所述绝对值编码器设置为用于根据探测方法检测驱动轴的位置或所述另外的轴的位置。
45.按照至少一种实施方式,所述探测方法包含光学的、磁的、电容式的、电阻式的或感应式的探测方法。
46.按照至少一种实施方式,所述反馈系统包含由编码器和辅助触点组成的组合,所述编码器和所述辅助触点结合地配置并设置为用于,检测驱动轴的绝对位置或与驱动轴连接的另外的轴的绝对位置,并且基于所检测的位置产生至少一个输出信号。反馈系统设置为用于根据所述至少一个输出信号求取针对驱动轴的位置的值。
47.按照至少一种实施方式,所述编码器和所述辅助触点直接地或间接地固定在马达轴、驱动轴或与其耦联的轴上。
48.按照至少一种实施方式,所述编码器实施为单圈旋转编码器或增量编码器或虚拟编码器,并且所述辅助开关实施为至少一个微开关或旋变器或正弦
‑
余弦编码器。
49.按照至少一种实施方式,所述编码器和所述辅助触点设置为用于根据探测方法检测驱动轴的位置或所述另外的轴的位置。
50.按照至少一种实施方式,所述运转配置可以由两个变量形成并且可以表示为在二维笛卡尔坐标系中的n阶多项式函数。
51.按照至少一种实施方式,所述变量是驱动系统的直接参量或间接参量、例如时间、驱动轴的旋转角、电流、电压、速度、转矩或加速度。
52.按照至少一种实施方式,一个变量可以通过坐标系的相应一个轴表示。
53.按照至少一种实施方式,所述控制装置可以作用到第二马达上。
54.按照至少一种实施方式,所述控制装置可以具有作用到第二马达上的第二功率
件。
55.按照至少一种实施方式,所述控制装置可以这样作用到第二马达上,使得该第二马达运行经历第一马达的反馈系统的实际值的运转配置。
56.按照至少一种实施方式,所述开关可以构造为有载分接开关或负载切换开关或选择器或双换向器或换向器或预选器。
57.按照改进的方案,也给出一种用于驱动开关的方法。所述方法包括:通过控制装置确定并选择针对用于驱动开关的驱动轴的运转配置;基于驱动轴的位置产生反馈信号;并且根据所述反馈信号和所述运转配置控制用于驱动开关的马达。
附图说明
58.下面参照附图借助于示例性的实施方式来详细地说明本发明。相同的或功能相同的或具有相同效果的组件可以设有相同的附图标记。相同的组件或具有相同功能的组件可以仅在它们首先出现的附图中说明。所述说明不一定在后续的附图中重复。
59.图中:
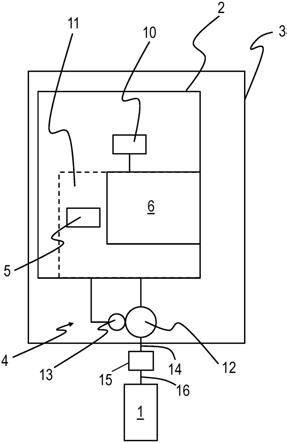
60.图1示出按照改进的方案的驱动系统的示例性实施方式的示意图;
61.图2a示出用于驱动系统的一个运转配置,所述运转配置示出驱动轴的旋转角,所述驱动轴的旋转角作为时间的函数;
62.图2b示出用于驱动系统的一个运转配置,所述运转配置示出作为驱动轴的旋转角的函数的转矩;
63.图3示出按照用于多个开关的改进的方案的驱动系统的示例性实施方式的另一个示意图;
64.图4示出按照具有多个功率件的改进的方案的驱动系统的示例性实施方式的示意图;
65.图5示出用于有载分接开关的驱动装置的示意图,利用所述有载分接开关可以在变压器的不同抽头(开关位置)之间切换;以及
66.图6示出按照本发明的用于驱动开关的方法的流程图的示意图。
具体实施方式
67.对于本发明的相同的或者作用相同的元件使用相同的附图标记。此外,为了清楚起见,仅在各个附图中示出对于说明相应的附图所需的附图标记。附图仅仅示出本发明的实施例,然而本发明不限于所示出的实施例。
68.图1示出用于开关1的驱动系统3的示例性实施方式的示意图。驱动系统3经由驱动轴16与开关1连接。驱动系统3包含马达12,所述马达可以经由马达轴14和可选地经由传动装置15驱动所述驱动轴16。驱动系统3的控制装置2包括:功率件11,所述功率件例如包含用于受开环控制地或受闭环控制地为马达12供能的变流器(未示出);以及控制单元10,所述控制单元用于例如经由总线(未示出)来驱控功率件11。驱动系统3具有编码器系统13,所述编码器系统用作反馈系统4或者是反馈系统4的一部分并且与功率件11连接。此外,编码器系统13直接地或间接地与驱动轴16耦联。
69.编码器系统13设置为用于检测至少一个针对驱动轴16的位置、特别是角位置、例
如绝对角位置的第一值。为此,编码器系统13可以例如包括绝对值编码器、特别是多圈绝对值编码器,所述绝对值编码器固定在驱动轴16、马达轴14或另外的轴上,所述另外的轴的位置唯一地与驱动轴16的绝对位置相关联。编码器系统13然而也可以包括单圈绝对值编码器和/或虚拟编码器和/或辅助开关。例如,驱动轴16的位置可以由马达轴14的位置唯一地确定、例如经由传动装置的传动比来确定。
70.反馈系统4设置为用于检测针对驱动轴16的位置的值。
71.控制装置2且特别是控制单元10和/或功率件11设置为用于根据反馈信号开环控制或闭环控制马达12,反馈系统4基于所述值产生所述反馈信号。
72.功率件11具有带有保存的运转配置22(未示出)的存储器5。用作反馈系统4的编码器系统13告知功率件11轴的位置且由此监控:驱动轴16是否正确地运行经历运转配置22或遵循预定的参数。运转配置22也可以存储在控制装置2或控制单元中。
73.在功率件11中保存有多个运转配置22。经由控制单元10选择运转配置22中的一个运转配置。
74.图2a示出用于开关1的切换处理的马达12的可行的运转配置22。示例性的运转配置22是具有两个变量的n阶多项式函数,所述n阶多项式函数描绘在二维笛卡尔坐标系20中。在图2a中示出的运转配置22中,在x轴24上描绘有时间t、亦即驱动轴16操纵马达12多长时间。在y轴25上描绘有驱动轴16的旋转角ω。在图2a中在轴24、25上描绘的参量仅是示例并且不应当理解为对本发明的限制。在x轴24和y轴25上描绘的变量可以是驱动系统3的直接参量或间接参量。直接参量可以例如是时间t、驱动轴16的旋转角、电流或电压。间接参量可以是速度、转矩、加速度或诸如此类。
75.图2b示出用于开关1的切换处理的马达12的可行的运转配置22,所述运转配置描绘在二维笛卡尔坐标系20中。在此,间接参量转矩m(t)描绘为旋转角ω的函数并且是n阶多项式函数。在图2a中示出的运转配置22中,在x轴24上描绘有旋转角ω。在y轴25上描绘有作用到驱动轴16上的转矩m(t)。
76.运转配置22预定如下额定值,驱动轴16必须运行经历所述额定值。在运行经历运转配置22时,经由反馈系统4检测的实际值可能与额定值具有偏差。根据实际值与额定值的预定的可行偏差可以中断或继续到马达12上的作用。所述偏差可以手动地调整或借助于学习过程来求取。
77.图3示出驱动系统3,所述驱动系统驱动两个开关1、30。也用作反馈系统4的第二编码器系统13告知功率件11或功率件11询问位置、也是第二驱动轴16的位置并且由此监控:第二驱动轴16是否正确地运行经历运转配置22或遵循预定的参量。在此,两个马达12、32可以:都跟随预定的运转配置22;或马达中的一个马达12运行经历预定的运转配置22而第二马达32跟随第一马达12的实际值,即,以“主
‑
从”功能的方式。第二马达32从功率件11获取为此的数据。由此确保:两个开关1、30——仅略微错开时间地——在相同的时间t运行经历相同的运转配置22。如果两个开关必须相互独立地运行同样的运转配置22,则可以在开关1、30中的一个开关中存在干扰或延迟的情况下更快速地完成第二开关,从而不存在同步的驱动并因此不存在同步的切换。然而这在一些情况下可能是正好需要的。通过“主
‑
从”运行可以保证安全的并行运行。
78.图4示出驱动系统3的一种实施方式,其中,第二功率件40设置有单独的马达32和
反馈系统4。在这里,两个马达12、32也可以:都跟随预定的运转配置22;或一个马达12跟随运转配置22而第二马达32跟随第一马达12的实际值(所述实际值通过第一反馈系统4提供),即,以“主
‑
从”功能的方式。这种有利的实施方式允许多个开关并行运行,所述开关在空间上相互距离远。功率件11、40以现场总线6、例如powerlink相互连接。仅发生数据交换而不发生能量传输。此外,出于经济原因可以有利的是,使用多个较小的功率件代替一个大的功率件。
79.图5示出开关1、30的驱动方案的示意性的构造,所述开关构造为有载分接开关170。在所述有载分接开关中可以移向开关位置n1、n2、
…
、n
n
,各所述开关位置与变压器180的调节绕组19的不同级连接。虽然对于开关1、30的各个开关位置n1、n2、
…
、n
n
的描述选择了有载分接开关170的方案,但这不应当理解成对本发明的限制。对于本领域技术人员而言当然的是,所述驱动方案也应用于负载切换开关、选择器、双换向器、换向器或预选器。
80.为了驱动选择器18和负载切换开关17设置有马达12,所述马达经由传动装置15作用到具有选择器18和负载切换开关17的有载分接开关170上。经由马达轴14和驱动轴16,马达12作用到有载分接开关170上,以便沿向上方向n
从开关位置n
n
切换到下一个较高的开关位置n
n 1
上,或沿向下方向n
‑
从开关位置n
n
切换到下一个较低的开关位置n
n
‑1上。在这里,以选择器预选择要切换的开关位置(级位置)并且负载切换开关执行实际的负载切换。
81.在图6中示出按照本发明的用于驱动至少一个开关1、30的方法的流程图。所述至少一个开关1、30包括至少一个驱动系统3,所述驱动系统具有与至少一个马达12连接的驱动轴16。从当前的开关位置n
a
(参见图5)到可达到的开关位置n
e
(参见图5)上的切换能以运转配置22描述,所述运转配置可以通过n阶多项式描述和/或示出。切换可以不仅沿向上方向n
而且沿向下方向n
‑
进行。在开始切换之前选择运转配置22,所述运转配置描述驱动系统3的为了从当前的开关位置n
a
切换到可达到的开关位置n
e
上的运行。在驱动系统3的运行期间,以反馈系统4检测所述至少一个马达1、30的驱动轴16的位置。驱动轴16的所检测的位置通过驱动轴16的位置的实际值来限定。反馈信号从驱动轴16的位置的所检测的实际值产生。
82.所选择的运转配置22代表额定值(一系列额定值),驱动系统3应当运行经历所述额定值,以便实现(例如在预定的时间中)从当前的开关位置n
a
切换到要达到的开关位置n
e
上。按照本发明,实施驱动轴16的位置的实际值与运转配置22(额定值)的比较,在理想情况下实时地或略微延迟地实施所述比较。由所述比较可以求取:是否存在实际值与运转配置22的偏差。
83.在实际值与运转配置22之间存在偏差的情况下控制装置2介入,所述控制装置这样控制所述至少一个马达12,使得实际值与运转配置22的偏差最小化。在运行经历运转配置期间,始终实施在实际值与运转配置22(额定值)之间的比较。如果确定有偏差,则由控制装置2相应地逆向控制(例如提高/降低马达12的转矩;提高/降低马达12的转速等)。在达到可达到的开关位置n
e
时驱动系统3停止。然后可以在必要时以另一个运转配置22引入另一个切换。如果偏差上升超过确定的已经预先限定的程度,则可以使切换中断。那么使整个系统停止,使驱动轴并因此使开关返回到限定的安全的位置中并且返回到开始位置中。为此可以颠倒地运行经历在开始时选择的运转配置22,或可以通过控制装置2或控制单元10选择并且运行经历另一个运转配置。
84.对于相应的开关确定运转配置,应当以所述运转配置以马达以理想的方式驱动驱动轴16。存储所述至少一个并且确定的运转配置以用于在切换时使用。为此可以设置有相应的存储装置。
85.以反馈系统4的至少一个编码器系统13确定驱动轴16的绝对位置或另外的轴的绝对位置。
86.控制装置2包括控制单元10和/或功率件11,利用所述控制单元和/或功率件这样开环控制或闭环控制所述至少一个马达12,使得在通过运转配置22预定的时间内达到要通过运转配置22达到的开关位置n
e
,并且以预限定的运转配置22几乎达到要达到的开关位置n
e
。
87.通过运转配置22例如预定所述至少一个马达13的速度或转矩。运转配置22因此预定:应当在哪个时刻或在驱动轴16的哪个位置中通过马达13在驱动轴16上实现什么转矩或什么速度。控制装置现在用于相应地控制马达13,以便实现运转配置22的规定。
88.本发明在考虑特别的实施方式的情况下描述。对于本领域内技术人员而言当然的是,可以进行改变和修改而不脱离下述权利要求的保护范围。
89.附图标记列表
90.1、30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
开关
[0091]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制装置
[0092]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
驱动系统
[0093]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
反馈系统
[0094]5ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储器
[0095]6ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
现场总线
[0096]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制单元
[0097]
11、40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
功率件
[0098]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
马达
[0099]
13、32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
编码器系统
[0100]
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
马达轴
[0101]
15、34
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传动装置
[0102]
16、31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
驱动轴
[0103]
170
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
有载分接开关
[0104]
17
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
负载切换开关
[0105]
18
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
选择器
[0106]
19
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
调节绕组
[0107]
20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
坐标系
[0108]
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
运转配置
[0109]
24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
x轴
[0110]
25
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
y轴
[0111]
n1、n2、
…
、n
n
ꢀꢀ
开关位置
[0112]
n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
向上方向
[0113]
n
‑
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
向下方向
[0114]
n
a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
当前的开关位置
[0115]
n
e
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可达到的开关位置
[0116]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
时间
[0117]
ω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转角
[0118]
m(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转矩
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。