1.本技术涉及医疗产品加工技术领域,尤其涉及一种内包袋上料传输线。
背景技术:
2.随着工业自动化的不断发展,越来越多的领域尝试通过自动化设备来替代传统的人工操作。在医疗产品生产领域,各环节加工往往通过人工进行;尤其在整个上料过程,需要大量的人力投入。特别是随着工业自动化的发展,零件的产量越来越大,零件的检测工作也越来越繁重,人力成本也越来越高。
技术实现要素:
3.为解决现有技术中,通过人力加工进行医疗产品装配的问题,本技术实施例提供一种内包袋上料传输线,以提升生产效率。
4.一种内包袋上料传输线,所述传输线至少包括分拣机构、转运机构、取料机构,所述分拣机构连接设置在所述转运机构一端,所述取料机构连接设置在所述转运机构另一端;通过所述分拣机构分拣的物料,由所述转运机构输送至所述取料机构进行上料。
5.可选地,所述分拣机构包括料斗,第一传输组件、第二传输组件、视觉抓取组件,所述料斗设置在所述第一传输组件一端,所述第二传输组件设置在所述第一传输组件一侧;所述视觉抓取组件设置在所述第一传输组件和/或第二传输组件上方;所述视觉抓取组件识别并抓取设置在所述第一传输组件的物料,并将移动到第二传输组件的放置槽内。
6.可选地,所述视觉抓取组件包括相邻设置的视觉识别组件和机器抓取组件,
7.所述视觉识别组件包括第一支架、采集盒、以及摄像头组件,所述第一支架设置在所述第一传输组件两侧,所述采集盒固定在所述第一支架上,所述摄像头组件设置在所述采集盒内,用于采集第一传输组件的物料位置;
8.所述机器抓取组件包括第二支架、并联机器人、以及吸盘组件,所述第二支架设置在所述第一传输组件、第二传输组件上方,所述并联机器人固定在所述第二支架上,所述吸盘组件设置在所述并联机器人上;其中,所述吸盘组件包括固定架、分设所述固定架两端的两吸盘,所述吸盘上端与气管连接。
9.可选地,所述第一传输组件、第二传输组件均包括第一传输支架、第一驱动电机、第一转轴、第一皮带,两所述第一转轴分别设置在所述第一传输支架上端,所述第一皮带套设在两所述第一转轴上,所述第一驱动电机与任一所述第一转轴连接并驱动第一转轴进行旋转;其中,所述第二传输组件的放置槽设置在第二传输组件的第一皮带上。
10.可选地,所述转运机构包括第三传输组件、理料组件;所述第三传输组件一端与所述第二传输组件连接,所述理料组件连接设置在所述第三传输组件一侧。
11.可选地,所述第三传输组件包括第二传输支架、第二驱动电机、第二转轴、第二皮带及至少一个插槽组件,
12.两所述第二转轴分别设置在所述第二传输支架上端,所述第二皮带套设在两所述
第二转轴上,所述第二驱动电机与任一所述第二转轴连接并驱动第二转轴进行旋转;
13.所述插槽组件至少包括载具、以及固定在所述载具上的插板;所述载具固定在所述第二皮带上,所述插板下端固定在所述载具一侧且与相邻插板围成用于插放内包袋的插槽。
14.可选地,所述插槽组件通过所述第二皮带在所述第三传输组件上循环转动;当所述插槽组件设置在所述第二传输组件的取料端时,所述插槽组件的插槽与移动到所述第二传输组件上的放置槽相对设置,且物料在设于所述第二传输组件的导向板压力下,插设在插槽内。
15.可选地,所述理料组件包括理料平台、至少一个设置在所述理料平台上的堆叠组件;
16.所述理料平台上表面设置有理料通道、以及与所述理料通道的出料端连接设置的取料位,所述理料通道入料端与所述第三传输组件连接,所述取料位与所述取料机构相邻设置;
17.所述堆叠组件包括堆叠支架、第一横移组件、固定板、堆叠气缸、压板、推板,所述堆叠支架设置在所述理料平台上,所述第一横移组件固定在所述堆叠支架上端,所述固定板设置在所述第一横移组件上且沿第一横移组件横向移动;至少一个所述堆叠气缸固定在所述固定板上,所述推板沿竖直方向连接设置在所述堆叠气缸下端,所述压板沿水平方向设置在所述堆叠气缸下端。
18.可选地,所述压板、所述推板设置在所述第三传输组件或理料通道或取料位上方,所述压板将设置在所述第三传输组件压合,通过所述推板将物料沿所述理料通道转运到取料位上。
19.可选地,所述取料机构包括取料支架、第二横移组件、升降组件、以及取料组件;
20.所述取料支架沿所述取料位相邻设置在所述理料平台一端,所述第二横移组件设置在所述取料支架上端,所述升降组件设置在所述第二横移组件上;所述取料组件设置在所述升降组件下端,且所述取料组件远离或伸入所述取料位设置。
21.其中,所述取料组件至少包括底板、托板、夹板、托板气缸、夹板气缸;所述底板与所述升降组件连接,所述托板气缸、所述夹板气缸设置在所述底板上表面,两所述托板相对设置在所述底板两侧且与所述托板气缸连接,所述夹板设置在底板另外两侧且与托板相邻设置,所述夹板与夹板气缸连接;所述托板、所述夹板与取料位相配合设置。
22.本技术实施例公开了一种基于视觉检测的内包袋上料装置。其有益效果在于:本技术通过分拣机构将物料整齐有序的移动到转运机构中,转运机构通过将一定数量的物料进行堆叠整理,移动到取料机构中进行取料。实现自动化上料,有效提高医疗产品的装配效率。
附图说明
23.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
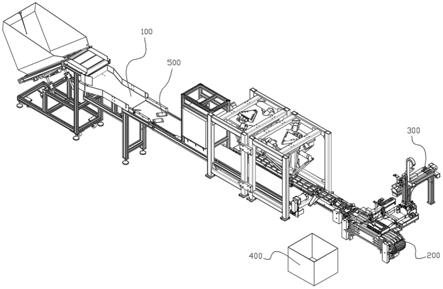
24.图1是本技术实施例提供的传输线的结构示意图。
25.图2是本技术实施例提供的分拣机构的局部示意图1。
26.图3是本技术实施例提供的分拣机构的局部示意图2。
27.图4是本技术实施例提供的转运机构的局部示意图1。
28.图5是本技术实施例提供的转运机构的局部示意图2。
29.图6是本技术实施例提供的转运机构的局部示意图3。
30.图7是本技术实施例提供的取料机构示意图。
具体实施方式
31.请参照图式,其中相同的组件符号代表相同的组件,本技术的原理是以实施在一适当的运算环境中来举例说明。以下的说明是基于所例示的本技术具体实施例,其不应被视为限制本技术未在此详述的其它具体实施例。
32.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
33.参见图1
‑
7,本技术实施例提供了一种内包袋上料传输线,传输线至少包括分拣机构100、转运机构200、取料机构300,分拣机构100连接设置在转运机构200一端,取料机构300连接设置在转运机构200另一端;通过分拣机构100 分拣的物料500,由转运机构200输送至取料机构300进行上料。在本实施例中,本技术通过分拣机构100将物料500整齐有序的移动到转运机构200中,转运机构200通过将一定数量的物料500进行堆叠整理,移动到取料机构300中进行取料。实现自动化上料,有效提高医疗产品的装配效率。
34.在一些实施例中,分拣机构100包括料斗5,第一传输组件1、第二传输组件2、视觉抓取组件,料斗5设置在第一传输组件1一端,第二传输组件2设置在第一传输组件1一侧;视觉抓取组件设置在第一传输组件1和/或第二传输组件2上方;视觉抓取组件识别并抓取设置在第一传输组件1的物料500,并将移动到第二传输组件2的放置槽21内。在本实施例中,料斗5可以设置有皮带通过皮带转动将料斗5的物料500移动到第一传输组件1上,设置在第一传输组件 1的物料500通过视觉抓取组件对内包袋进行识别并分别均匀抓取到第二传输组件2,实现自动化上料,有效提高医疗产品的装配效率。其中,在第一传输组件 1没有设置料斗5一端还是有放置框400放置没有被视觉抓取组件抓取的物料500。
35.在一些实施例中,视觉抓取组件包括相邻设置的视觉识别组件3和机器抓取组件4,视觉识别组件3包括第一支架31、采集盒32及摄像头组件33一支架 31设置在第一传输组件1两侧,采集盒32在第一支架31上,摄像头组件33设置在采集盒32内,用于采集第一传输组件1的物料500位置;在本实施例中,采集盒32向下开口设置,摄像头组件33通过采集盒获取由第一传输组件1传输的物料500照片;摄像头组件33可以设置在采集盒32中部且通过多轴固定支架固定在采集盒32上端;其中,摄像头组件33通过通讯线路与设置在外部的处理终端连接,摄像头组件33获取在第一传输组件1视觉采集区域经过的物料500 图像;并将图像发送到处理终端。其中,处理终端设置有图像处理程序,通过对物料500的四角点进行检测,确定物料500中心及方向,并发送相应指令到机器抓取组件4进行处理。
36.机器抓取组件4包括第二支架41、并联机器人42、以及吸盘组件43,第二支架41设置在第一传输组件1、第二传输组件2上方,并联机器人42固定在第二支架41上,吸盘组件43设置在并联机器人42上;其中,吸盘组件43包括固定架、分设固定架两端的两吸盘,吸盘上端与气管连接。在本实施例中,并联机器人与处理终端连接,获取位移指令通过调节多轴位置,使吸盘组件移动到物料上方,并通过吸盘吸力吸取物料,然后将物料移动到第二传输机构上。其中,机器抓取组件4与视觉抓取组件相邻设置,且机器抓取组件4沿物料移动方向设置在视觉抓取组件后方。
37.在一些实施例中,第一传输组件1、第二传输组件2均包括第一传输支架、第一驱动电机、第一转轴、第一皮带,两第一转轴分别设置在第一传输支架上端,第一皮带套设在两第一转轴上,第一驱动电机与任一第一转轴连接并驱动第一转轴进行旋转;其中,第二传输组件2的放置槽21设置在第二传输组件2的第一皮带上。在本实施例中,本技术的第一传输组件1通过第一驱动电机驱动,使第一皮带进行转动,将物料从料斗5移动到视觉抓取组件下方。第一传输组件1 通过第一驱动电机驱动,使第一皮带进行转动,将物料从与第一传输组件1相邻一端移动到转运机构200上。
38.在一些实施例中,转运机构200包括第三传输组件6、理料组件;第三传输组件6一端与第二传输组件2连接,理料组件连接设置在第三传输组件6一侧。在上述实施例的一种实施方式中,第三传输组件6包括第二传输支架61、第二驱动电机62、第二转轴63、第二皮带64及至少一个插槽组件65,两第二转轴 63分别设置在第二传输支架61上端,第二皮带64套设在两第二转轴63上,第二驱动电机62与任一第二转轴63连接并驱动第二转轴63进行旋转;插槽组件 65至少包括载具、以及固定在载具上的插板;载具固定在第二皮带64上,插板下端固定在载具一侧且与相邻插板围成用于插放内包袋的插槽。
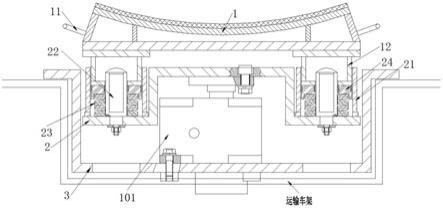
39.在本实施例中,插槽组件65用于接收来自第二传输组件2的物料,并通过第二皮带64移动到理料组件处进行理料,插槽组件65通过第二皮带64在第三传输组件6上循环转动;当插槽组件65设置在第二传输组件2的取料端时,插槽组件65的插槽与移动到第二传输组件2上的放置槽21相对设置,且物料在设于第二传输组件2的导向板22压力下,插设在插槽内,其中,每个插槽内可设置有一件物料,第三传输组件6通过将装有物料的插槽组件65移动到理料通道入料端,通过理料组件进行堆叠转运。
40.在上述实施的一种实施方式中,理料组件包括理料平台71、至少一个设置在理料平台71上的堆叠组件;理料平台71上表面设置有理料通道72、以及与理料通道72的出料端连接设置的取料位73,理料通道72入料端与第三传输组件6连接,取料位73与取料机构300相邻设置;堆叠组件包括堆叠支架74、第一横移组件75、固定板76、堆叠气缸77、压板79、推板78,堆叠支架74设置在理料平台71上,第一横移组件75固定在堆叠支架74上端,固定板76设置在第一横移组件75上且沿第一横移组件75横向移动;至少一个堆叠气缸77固定在固定板76上,推板78沿竖直方向连接设置在堆叠气缸77下端,压板79沿水平方向设置在堆叠气缸77下端。在本实施例中,第一横移组件75包括横移滑座、横移滑台、横移电机,横移滑座、横移电机固定在堆叠支架74上端,横移滑台与横移滑座滑动连接,且在横移滑座驱动下进行横向移动。压板79、推板78设置在第三传输组件6或理料通道72或取料位73上方,压板79将设置在第三传输组件6压合,通过推板78将物料沿理料通道72转运到取料位73上。
41.在一些实施例中,取料机构300包括取料支架81、第二横移组件82、升降组件83、以
及取料组件84;取料支架81沿取料位相邻设置在理料平台71一端,第二横移组件82设置在取料支架81上端,升降组件83设置在第二横移组件82 上;取料组件84设置在升降组件83下端,且取料组件84远离或伸入取料位73 设置。其中,取料组件84至少包括底板85、托板86、夹板87、托板气缸、夹板气缸;底板85与升降组件83连接,托板气缸、夹板气缸设置在底板85上表面,两托板86相对设置在底板85两侧且与托板气缸连接,夹板87设置在底板 85另外两侧且与托板相邻设置,夹板87与夹板气缸连接;托板86、夹板87与取料位73相配合设置。在本实施例中,托板86通过托板气缸进行夹紧或打开动作,夹板87通过夹板气缸进行夹紧或打开动作。托板86、夹板87与取料位73 相配合设置。在取料时,取料机构伸入取料位73,托板气缸工作,夹板气缸工作,两托板打开、两夹板打开;夹板沿取料槽伸入取料位73中,随后,托板气缸、夹板气缸迅速复位,分别夹持在多个物料四边,通过升降组件83、第二横移组件82,移动到下一工位。
42.在描述本技术的概念的过程中使用了术语“一”和
“”
以及类似的词语(尤其是在所附的权利要求书中),应该将这些术语解释为既涵盖单数又涵盖复数。此外,除非本文中另有说明,否则在本文中叙述数值范围时仅仅是通过快捷方法来指代属于相关范围的每个独立的值,而每个独立的值都并入本说明书中,就像这些值在本文中单独进行了陈述一样。另外,除非本文中另有指明或上下文有明确的相反提示,否则本文中所述的所有方法的步骤都可以按任何适当次序加以执行。本技术的改变并不限于描述的步骤顺序。除非另外主张,否则使用本文中所提供的任何以及所有实例或示例性语言(例如,“例如”)都仅仅为了更好地说明本技术的概念,而并非对本技术的概念的范围加以限制。在不脱离精神和范围的情况下,所属领域的技术人员将易于明白多种修改和适应。
43.以上对本技术实施例所提供的电子设备控制方法、装置、存储介质及电子设备进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。