1.本实用新型的实施例涉及一种输送机构,特别涉及一种阶梯式步进输送机构。
背景技术:
2.在现有的轴类零件的加工工艺中需要进行对于轴类零件在工艺上进行反复加工,如粗加工到精加工需要进行数次反复,但是,在现有的轴类零件做这样的往复搬运时,没有办法通过输送机构来进行,只能依靠人工来实现,导致了轴类加工工艺不能完全的自动化。
技术实现要素:
3.本实用新型的实施方式的目的在于提供一种能够进行往复搬运的输送机构,解决现有的轴类零件做这样的往复搬运时,没有办法通过输送机构来进行的技术问题。
4.为了实现上述目的,本实用新型的实施方式设计了一种阶梯式步进输送机构,其特征在于,包括:
5.底板;
6.固定支架,在所述的底板的上面,在所述的底板的两侧固定所述的固定支架的一端;所述的固定支架的另一端向上设置;
7.滑动机构,在所述的底板的上方,在所述的固定支架之间,固定所述的滑动机构;
8.步进输送支架,在所述的滑动机构上方的滑动板上固定所述的步进输送支架的一端;所述的步进输送支架的另一端同样向上设置;
9.曲柄滑块凸轮机构,在所述的滑动板的一侧活动连接所述的曲柄滑块凸轮机构;所述的曲柄滑块凸轮机构带动所述的步进输送支架在所述的固定支架之间做阶梯式步进动作,进行输送。
10.进一步,在所述的固定支架上方的一端上设置第一支撑板,所述的第一支撑板呈u型开口状,在所述的第一支撑板的一侧固定第一加强筋。
11.进一步,所述的固定支架在沿所述的底板的中心轴线左右对称设置。
12.进一步,滑动机构,还包括:
13.导轨,在所述的底板上方固定所述的导轨,在所述的导轨上设置滑块,所述的滑块固定在所述的滑动板的下方;所述的滑块与所述的滑动板固定连接;
14.直线轴承,在所述的滑动板上固定若干个直线轴承;在所述的直线轴承上设置升降杆,在所述的升降杆的一端的顶部固定升降板,在所述的升降板上固定所述的步进输送支架。
15.进一步,在所述的导轨之间,在所述的底板上设置一通孔,所述的升降杆设置在所述的通孔中。
16.进一步,在所述的升降板一侧固定滑辊,所述的滑辊的一端固定在所述的升降板中心位置的侧面上;所述的滑辊的一端与曲柄滑块凸轮机构活动连接。
17.进一步,所述的曲柄滑块凸轮机构,包括:
18.伺服电机,在所述的底板上固定所述的伺服电机;在所述的伺服电机的一侧固定主动齿形带轮,
19.从动齿形带轮,所述的从动齿形带轮活动连接驱动轴,所述的驱动轴固定在固定支架上,所述的驱动轴的一端固定连接所述的从动齿形带轮;所述的从动齿形带轮与所述的主动齿形带轮之间通过齿形带轮齿形带连接;
20.凸轮,在所述的驱动轴的另一端固定连接所述的凸轮;
21.曲臂,在所述的凸轮的一端活动连接所述的曲臂的一端;所述的曲臂上沿着所述的曲臂的中心轴线上开设滑槽;在所述的滑槽内活动连接滑辊,所述的滑辊在所述的滑槽内滑动;所述的曲臂带动所述的滑动机构做预设轨迹运动。
22.进一步,所述的曲臂限制在升降板与所述的凸轮之间运动。
23.进一步,所述的伺服电机的一端上设置减速机,对于所述的伺服电机进行减速。
24.进一步,所述的步进输送支架的上方的一端上设置第二支撑板,所述的第二支撑板同样呈u型开口状,在所述的第二支撑板的一侧固定第二加强筋;所述的步进输送支架的顶端的高度,在所述的曲柄滑块凸轮机构处于最低点时,与所述的固定支架高度一致。
25.本实用新型的实施方式同现有技术相比,通过对曲柄滑块凸轮机构进行设计,将沿着预设的轨迹进行运行,将固定上的轴类零件进行一次搬运,并进行返回,实现固定上的轴类零件搬运并返回的循环往复,解决了现有的轴类零件做这样的往复搬运时,没有办法通过输送机构来进行的技术问题,实现了轴类零件的自动化过程的实现,本实用新型中的实施方式是一种具有效率高,安全、舒适、可靠的输送机构,实现了能将工件,沿着阶梯状支架上升实现输送的运动轨迹。与现有技术相比,简化了机械结构设计,降低了设备的安装要求以及人工费和材料本身的费用,提高了设备的传动速度和输送效率。
附图说明
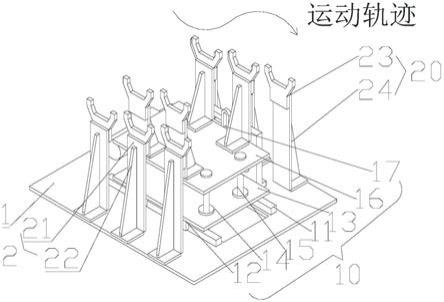
26.图1为本实用新型的结构示意图;
27.图2为图1的主视示意图;
28.图3为图1的俯视示意图;
29.图4为图1的左视示意图。
具体实施方式
30.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
31.本实用新型的第一实施方式涉及一种阶梯式步进输送机构,如图1、图2、图3、图4所示,包括:
32.底板1;
33.固定支架2,在底板1的上面,在底板1的两侧固定固定支架2的一端;固定支架2的另一端向上设置;
34.滑动机构10,在底板1的上方,在固定支架2之间,固定滑动机构10;
35.步进输送支架20,在滑动机构10上方的滑动板11上固定步进输送支架20的一端;步进输送支架20的另一端同样向上设置;
36.曲柄滑块凸轮机构30,在滑动板11的一侧活动连接曲柄滑块凸轮机构30;曲柄滑块凸轮机构30带动步进输送支架20在固定支架2之间做阶梯式步进动作,进行输送。在本实施例中,曲柄滑块凸轮机构30带动步进输送支架20在滑动机构10按照如图1中所示的箭头的运动轨迹,做起伏状的运动,这样,利用步进输送支架20将轴类零件在固定支架2上进行往复搬运输送。在本实施例中,解决了现有的轴类零件做这样的往复搬运时,没有办法通过输送机构来进行的技术问题,实现了轴类零件的自动化过程的实现,本实施例是一种具有效率高,安全、舒适、可靠的输送机构,实现了能将轴类零件,固定支架2沿着如图1中所示的箭头的运动轨迹进行输送的技术效果。与现有技术相比,简化了机械结构设计,降低了设备的安装要求以及人工费和材料本身的费用,提高了设备的传动速度和输送效率。
37.为了实现上述的技术效果,如图1、图2、图3、图4所示,在固定支架2上方的一端上设置第一支撑板21,第一支撑板21呈u型开口状,在第一支撑板21的一侧固定第一加强筋22。固定支架2主要起到对于轴类零件进行支撑的作用,可以将轴类零件放到固定支架2上方。
38.为了实现上述的技术效果,如图1、图2、图3、图4所示,固定支架2在沿底板1的中心轴线左右对称设置。为了实现如图1中所示的箭头的运动轨迹运动,固定支架2在沿底板1的中心轴线左右对称设置这样的结构,能够保证轴类零件在固定支架2上放置的稳定性。
39.为了实现上述的技术效果,如图1、图2、图3、图4所示,滑动机构10,还包括:
40.导轨
··
11,在底板1上方固定导轨11,在导轨11上设置滑块12,滑块12固定在滑动板13的下方;滑块12与滑动板13固定连接;
41.直线轴承14,在滑动板13上固定若干个直线轴承14;在直线轴承14上设置升降杆15,在升降杆15的一端的顶部固定升降板16,在升降板16上固定步进输送支架20。步进输送支架20在滑动机构10在遵循上如图1中所示的箭头的运动轨迹过程中进行滑动。
42.如图1、图2、图3、图4所示,在导轨11之间,在底板1上设置一通孔18,升降杆15设置在通孔18中。通孔18主要是为了升降杆15在下降的过程中,能够使得升降杆15具有下降的空间。
43.如图1、图2、图3、图4所示,在升降板16一侧固定滑辊17,滑辊17的一端固定在升降板16中心位置的侧面上;滑辊17的一端与曲柄滑块凸轮机构30活动连接。滑辊17与曲柄滑块凸轮机构30的活动连接,主要起到升降板16能够按照如图1中所示的箭头的运动轨迹运动。
44.为了实现上述的技术效果,如图1、图2、图3、图4所示,曲柄滑块凸轮机构30,包括:
45.伺服电机31,在底板1上固定伺服电机31;在伺服电机31的一侧固定主动齿形带轮32,
46.从动齿形带轮33,从动齿形带轮33活动连接驱动轴34,驱动轴34固定在固定支架35上,驱动轴34的一端固定连接从动齿形带轮33;从动齿形带轮33与主动齿形带轮32之间通过齿形带轮齿形带36连接;
47.凸轮37,在驱动轴34的另一端固定连接凸轮37;
48.曲臂38,在凸轮37的一端活动连接曲臂38的一端;曲臂38上沿着曲臂38的中心轴线上开设滑槽39;在滑槽39内活动连接滑辊17,滑辊17在滑槽39内滑动;曲臂38带动滑动机构10做预设轨迹运动。这样,使得在曲柄滑块凸轮机构30的驱动下,滑动机构10做如图1中箭头所示的预设轨迹运动,进行运动,利用步进输送支架20将轴类零件在固定支架2上进行往复搬运输送。根据上述的运动方式,曲臂38限制在升降板16与凸轮37之间运动;能够保证沿着预设轨迹运动时,曲臂38的作用在升降板16与凸轮37之间。
49.为了实现上述的技术效果,如图1、图2、图3、图4所示,伺服电机31的一端上设置减速机311,对于伺服电机31进行减速。
50.为了实现上述的技术效果,如图1、图2、图3、图4所示,步进输送支架20的上方的一端上设置第二支撑板23,第二支撑板23同样呈u型开口状,在第二支撑板23的一侧固定第二加强筋24;步进输送支架20的顶端的高度,在曲柄滑块凸轮机构30处于最低点时,与固定支架2高度一致。
51.在本实施方式中,通过伺服减速电机31来带动齿形带轮齿形带36运动,从而将动力传输到曲柄滑块凸轮机构30;曲柄滑块凸轮机构30有滑槽39,能将升降板16和滑动板13在直线轴承14和导轨11的限制下,沿着如图1箭头所述的运动轨迹运动,从而带动步进输送支架20运动,从而能将工件沿着1号固定支架2,,2号固定支架2,3号固定支架2运动。工件上在1号固定支架2上,最终工件运动到3号固定支架2上。从而达到阶梯式步进输送的目的。
52.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。