1.本发明涉及零部件装配技术领域,尤其涉及一种机器人自动换取套筒装置及其应用。
背景技术:
2.随着工业的发展和机器人技术的成熟,零部件的装配过程复杂程度日趋增大,对于当前自动化程度高的复杂操作环境,需要多种规格套筒才能完成不同规格螺栓的装配,传统的人工换取套筒的方式会导致生产过程中不能连续,程序需要中止,效率低下,不能适应机械自动化程度高、安全性高、适应性广的操作场景,而且对于判断套筒是否在线到位缺乏检测和信号反馈,从而无法保证人工换取套筒的安全。因此发明一种机器人自动换取套筒装置,套筒库配合其自动换取套筒系统协同工作,在大幅度缩短操作时间、降低过程成本和提高安全性能方面起到非常重要作用。
3.在中国专利申请文献cn212946438u中,公开了一种螺栓拧紧工位自动换套筒系统,包括工业机器人、套筒更换模块、拧紧模块及拧紧台,拧紧模块设于工业机器人的机械臂前端,套筒更换模块置于拧紧台的一侧,套筒更换模块包括台座、套筒支架、挡块及螺栓座,套筒支架设于台座的顶部,螺栓座与套筒支架连接,挡块设于套筒支架的顶部,挡块上设有用于卡接拧紧套筒且与螺栓座平行设置的挡孔,台座顶部还设有设备支架,设备支架上设有用于夹紧固定拧紧套筒的卡爪、用于检测拧紧套筒的在位情况的第一传感器及用于检测拧紧套筒与螺栓座连接状况的第二传感器。第一传感器设于卡爪上方且与挡块水平设置,第二传感器与螺栓座水平设置。卡爪与第一传感器通讯,第二传感器与工业机器人通讯。套筒支架包括第一套筒支架及第二套筒支架,第一套筒支架设于台座顶部的一端,第二套筒支架设于台座顶部的另一端,第一套筒支架及第二套筒支架的顶部均设有挡块。螺栓座包括第一螺栓座及第二螺栓座,第一螺栓座与第一套筒支架连接,第二螺栓座与第二套筒支架连接,第一螺栓座与第二螺栓座的螺栓规格不同。拧紧模块包括拧紧支架、拧紧轴、拧紧轴连接转换套及拧紧套筒,拧紧支架设于工业机器人的机械臂前端,拧紧轴设于拧紧支架的一端,拧紧轴的一端连接拧紧轴连接转换套的一端,拧紧轴连接转换套的另一端连接拧紧套筒的一端。拧紧套筒上设有与挡孔配合卡接的卡箍。该方案虽然能实现套筒自动换取功能,但是由于依靠卡爪卡紧套筒,卡爪与第一传感器通讯,通过卡爪的状态来检测套筒的在位情况,带来较高的设计成本,而且结构较为复杂。此外,该方案仅能实现两种规格套筒的相互换取,无法满足需要换取三种或三种以上的套筒的工作要求。
4.现有技术存在如下不足:
5.1.现有技术中,都是针对特定的工作环境设计特定的套筒自动换取装置,只能满足较为简单的工作环境,对于要求更换多种规格套筒的工作环境,需要人工参与方能完成,降低了工作效率,存在安全隐患,不能确保工作的连续性。
技术实现要素:
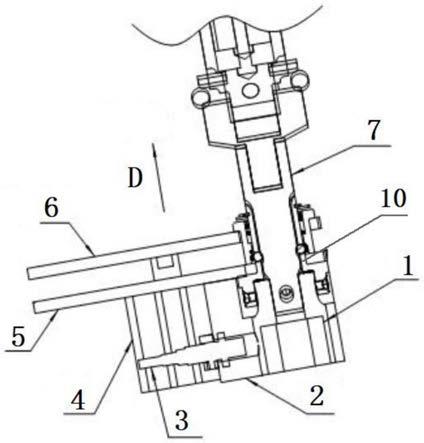
6.为解决现有技术中存在的技术问题,本发明提供了一种机器人自动换取套筒装置,包括机器人、支撑板、气缸、举升板、套筒储存装置、连接杆和传感器;支撑板呈倾斜状态,套筒储存装置包括套筒放置盒、套筒、钢珠护套、钢珠、弹簧套和弹簧,套筒储存装置固定在支撑板上,传感器安装在套筒放置盒背面,传感器与plc控制系统连接,plc控制系统控制气缸运动;气缸与举升板连接;钢珠位于钢珠护套中,当需要更换套筒时,气缸推动弹簧套接触到垫圈,钢珠避开位置,以方便连接杆插进套筒,紧接着气缸缩回去,弹簧套挤压钢珠,以压紧连接杆;连接杆的一端连接套筒储存装置,连接杆的另一端与机器人机械臂末端连接。倾斜的支撑板使套筒放置方向更符合机器人作业姿态,并且利用套筒自身重力作用保持向下,避免套筒在车间振动环境而脱离套筒放置盒。本发明的机器人自动换取套筒装置可适应机器人多种作业姿态,可连续换取多个套筒,结构简单。
7.本发明提供了一种机器人自动换取套筒装置,包括:机器人、支撑板、气缸、举升板、多个套筒储存装置、连接杆和传感器;
8.套筒储存装置与支撑板连接;支撑板上活动设置举升板;
9.机器人机械臂末端通过拧紧工具连接套筒储存装置;
10.套筒储存装置上设有传感器,用来接收和反馈信号;
11.传感器与plc控制系统连接,plc控制系统控制气缸运动;
12.气缸与举升板连接;
13.连接杆的一端连接套筒储存装置,连接杆的另一端与机器人机械臂末端连接。
14.优选地,支撑板呈倾斜状态。
15.优选地,用螺栓将套筒储存装置固定在支撑板上。
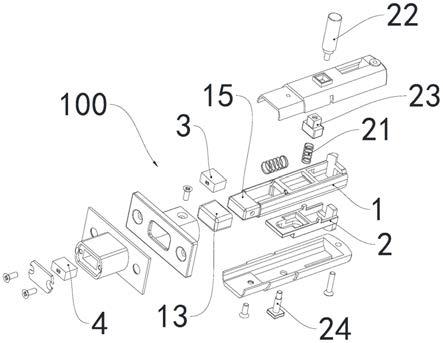
16.优选地,套筒储存装置包括套筒、套筒放置盒、钢珠护套、钢珠、弹簧套和弹簧;
17.套筒放置盒与支撑板连接;
18.套筒上端设置有钢珠护套,钢珠位于钢珠护套内;
19.钢珠护套上端设有弹簧套,弹簧位于弹簧套中;套筒储存装置的上端设有垫圈;
20.套筒上部与连接杆接触。
21.优选地,举升板与弹簧套连接,弹簧套的下端设有伸出端,举升板的一侧边缘的上方与弹簧套的伸出端的下表面接触;
22.钢珠护套的上端设有伸出端,支撑板的一侧边缘的下方与钢珠护套的伸出端的上表面接触。
23.优选地,当需要更换套筒时,plc控制系统控制气缸伸出,气缸推动举升板,并带动弹簧套接触到垫圈,钢珠避开位置,连接杆插进套筒;然后气缸回缩,弹簧套挤压钢珠,以压紧连接杆。
24.优选地,在每个套筒放置盒背面安装有一个传感器。
25.本发明提供了一种机器人自动换取套筒的方法,使用上述的机器人自动换取套筒装置;
26.当进行更换套筒作业时,机器人的机械臂向靠近套筒储存装置的方向运动;
27.当套筒到达套筒放置盒预定位置时,设置在套筒放置盒背面的传感器接收套筒到达信号,并反馈给plc控制系统;
28.plc控制系统控制气缸向上运动举起举升板,举升板推动弹簧套接触套筒储存装置的上端的垫圈;
29.钢珠避开位置,机器人的机械臂把连接杆拔出来;
30.连接杆带动套筒脱离到位后,传感器接收到套筒脱离位置信号,传感器信号发送信号给气缸,通知气缸缩回;
31.气缸缩回到开始状态,开始进行抓取套筒动作;
32.机器人抓取套筒时,机器人带动连接杆到达抓取套筒准备位置,并沿垂直于举升板的方向向下进入套筒放置盒;
33.连接杆推动钢珠向弹簧套内运动,当连接杆到位与套筒卡紧时,钢珠贴紧弹簧套并抵紧连接杆;
34.机器人的机械臂带动连接杆沿远离套筒储存装置的方向取出套筒,使套筒脱离套筒放置盒;
35.每个套筒放置盒背面的传感器接收到对应的套筒脱离位置信号,并反馈给plc控制系统;plc控制系统控制气缸缩回恢复开始状态。
36.本发明提供了一种用于批头拧紧螺栓的套筒装置,其使用上述的套筒储存装置。
37.本发明提供了一种用于记号笔涂写防松标志的套筒装置,其使用上述的套筒储存装置。
38.工作原理:
39.在套筒库中,不同的套筒放置盒储存不同的套筒,每个套筒放置盒放置位置同时会对应相应传感器,检测套筒编号和套筒是否放置到位,传感器会将信号反馈到控制系统,过程检测精确,储存套筒规格多,可以适应多种工作环境。
40.当进行更换套筒作业时,机器人的机械臂沿c方向(如图7所示)的反方向运动,当套筒到达套筒放置盒的预定位置时,设置在套筒放置盒背面的传感器接收套筒到达信号,并反馈给plc控制系统,然后plc控制系统控制气缸向上运动举起举升板,举升板推动弹簧套接触套筒储存装置的上端的垫圈,钢珠避开位置,机器人的机械臂把连接杆拔出来,套筒脱离到位后,传感器接收到套筒脱离位置信号,气缸收到有传感器信号,通知气缸缩回,气缸缩回到开始状态,开始进行抓取套筒动作。
41.机器人抓取套筒时,机器人带动连接杆到达抓取套筒准备位置,再沿着图5中a方向进入套筒放置盒,在此过程中,钢珠随着连接杆的伸进向弹簧套内运动,当连接杆到位与套筒卡紧时,即机器人更换抓取到位状态时,钢珠贴紧弹簧套,此时钢珠完全抵紧连接杆,然后机器人的机械臂带动连接杆沿c方向(如图7所示)取出套筒,使套筒脱离套筒放置盒,每个传感器接收到对应的套筒脱离位置信号,并反馈给plc控制系统,plc控制系统控制气缸缩回恢复开始状态。
42.本发明的装置不需要额外动力,使用方便,制造简易,自动化程度高。
43.与现有技术相对比,本发明的有益效果如下:
44.1.本发明的机器人自动换取套筒装置通过plc控制气缸运动举起举升板,钢珠位于钢珠护套中,当需要更换套筒时,气缸推动弹簧套接触到套筒储存装置的上端的垫圈,钢珠避开位置,以方便连接杆插进套筒,随后气缸缩回去,弹簧套挤压钢珠,以压紧连接杆;机器人的机械臂带动连接杆拔出套筒放置盒,完成自动更换套筒,相对于人工更换套筒,自动
化程度高,安全性更高,能够在无人的环境下保证装配过程的连续性。
45.2.本发明的机器人自动换取套筒装置抓取套筒时,机器人带动连接杆到达抓取套筒准备位置,再进入套筒放置盒,钢珠随着连接杆的伸进而向弹簧套内运动,当连接杆到位与套筒卡紧时,钢珠贴紧弹簧套,钢珠抵紧连接杆,机器人带动连接杆沿水平方向拿出套筒,使套筒脱离套筒放置盒,气缸缩回恢复开始状态,相对于人工更换套筒,相对于人工更换套筒,自动化程度高,安全性更高,能够在无人的环境下保证装配过程的连续性。
46.3.本发明的机器人自动换取套筒装置,设置多个套筒储存装置,每个套筒储存装置放置不同的套筒,可以实现连续更换多个套筒,无需中断工作,无需人工参与,解决了更换多种规格套筒并保证高工作效率和安全性的问题。
附图说明
47.图1是本发明的一个实施例的与机器人整体装配正面立体图;
48.图2是本发明的一个实施例的与机器人整体装配背面立体图;
49.图3是本发明的一个实施例的剖切图;
50.图4是本发明的一个实施例的套筒剖切图;
51.图5是本发明的一个实施例的机器人更换套筒准备位置状态示意图;
52.图6是本发明的一个实施例的机器人更换套筒更换到位状态示意图;
53.图7是本发明的一个实施例的机器人更换套筒脱离位置状态示意图。
54.图中,1、套筒;101、钢珠护套;102、弹簧套;103、钢珠;104、弹簧;105、垫圈;2、套筒放置盒;3、传感器;4、气缸;5、支撑板;6、举升板;7、连接杆;8
‑
拧紧工具;9
‑
机器人机械臂末端,10、套筒储存装置、1011、钢珠护套的伸出端;1021、弹簧套的伸出端;d
‑
气缸伸缩方向。
具体实施方式
55.下面结合附图,对本发明的具体实施方式作详细的说明。
56.本发明提供了一种机器人自动换取套筒装置,包括:机器人、支撑板5、气缸4、举升板6、多个套筒储存装置10、连接杆7和传感器3;
57.套筒储存装置10与支撑板5连接;支撑板5上活动设置举升板6;
58.机器人机械臂末端9通过拧紧工具8连接套筒储存装置10;
59.套筒储存装置10上设有传感器3,用来接收和反馈信号;
60.传感器3与plc控制系统连接,plc控制系统控制气缸4运动;
61.气缸4与举升板5连接;
62.连接杆7的一端连接套筒储存装置10,连接杆7的另一端与机器人机械臂末端9连接。
63.根据本发明的一个具体实施方案,支撑板5呈倾斜状态。
64.根据本发明的一个具体实施方案,用螺栓将套筒储存装置10固定在支撑板5上。
65.根据本发明的一个具体实施方案,套筒储存装置10包括套筒1、套筒放置盒2、钢珠护套101、钢珠103、弹簧套102和弹簧104;
66.套筒放置盒2与支撑板5连接;
67.套筒1上端设置有钢珠护套101,钢珠103位于钢珠护套101内;
68.钢珠护套101上端设有弹簧套102,弹簧104位于弹簧套102中;套筒储存装置10的上端设有垫圈105;
69.套筒1上部与连接杆7接触。
70.根据本发明的一个具体实施方案,举升板6与弹簧套102连接,弹簧套102的下端设有伸出端,举升板6的一侧边缘的上方与弹簧套的伸出端1021的下表面接触;
71.钢珠护套101的上端设有伸出端,支撑板5的一侧边缘的下方与钢珠护套的伸出端1011的上表面接触。
72.根据本发明的一个具体实施方案,当需要更换套筒时,plc控制系统控制气缸4伸出,气缸4推动举升板6,并带动弹簧套102接触到垫圈105,钢珠103避开位置,连接杆7插进套筒1;然后气缸4回缩,弹簧套102挤压钢珠103,以压紧连接杆7。
73.根据本发明的一个具体实施方案,在每个套筒放置盒2背面安装有一个传感器3。
74.本发明提供了一种机器人自动换取套筒的方法,使用上述的机器人自动换取套筒装置;
75.当进行更换套筒作业时,机器人机械臂末端9向靠近套筒储存装置10的方向运动;
76.当套筒1到达套筒放置盒2预定位置时,设置在套筒放置盒2背面的传感器3接收套筒1到达信号,并反馈给plc控制系统;
77.plc控制系统控制气缸4向上运动举起举升板6,举升板6推动弹簧套102接触套筒储存装置10的上端的垫圈105;
78.钢珠103避开位置,机器人的机械臂把连接杆7拔出来;
79.连接杆7带动套筒1脱离到位后,传感器3接收到套筒1脱离位置信号,传感器3信号发送信号给气缸4,通知气缸4缩回;
80.气缸4缩回到开始状态,开始进行抓取套筒1动作;
81.机器人抓取套筒1时,机器人带动连接杆7到达抓取套筒准备位置,并沿垂直于举升板6的方向向下进入套筒放置盒2;
82.连接杆7推动钢珠103向弹簧套102内运动,当连接杆7到位与套筒1卡紧时,钢珠103贴紧弹簧套102并抵紧连接杆7;
83.机器人的机械臂带动连接杆7沿远离套筒储存装置10的方向取出套筒1,使套筒1脱离套筒放置盒2;
84.每个套筒放置盒2背面的传感器3接收到对应的套筒1脱离位置信号,并反馈给plc控制系统;
85.plc控制系统控制气缸4缩回恢复开始状态。
86.本发明提供了一种用于批头拧紧螺栓的套筒装置,其使用上述的套筒储存装置10。
87.本发明提供了一种用于记号笔涂写防松标志的套筒装置,其使用上述的套筒储存装置10。
88.实施例1
89.根据本发明的一个具体实施方案,下面说明本发明的机器人自动换取套筒装置进行详细说明。
90.本发明提供了一种机器人自动换取套筒装置,包括:机器人、支撑板5、气缸4、举升
板6、多个套筒储存装置10、连接杆7和传感器3;
91.套筒储存装置10与支撑板5连接;支撑板5上活动设置举升板6;
92.机器人机械臂末端9通过拧紧工具8连接套筒储存装置10;
93.套筒储存装置10包括套筒1、套筒放置盒2、钢珠护套101、钢珠103、弹簧套102和弹簧104,套筒储存装置10的上端设有垫圈105;
94.套筒储存装置10上设有传感器3,用来接收和反馈信号;
95.传感器3与plc控制系统连接,plc控制系统控制气缸4运动;
96.气缸4与举升板6连接;
97.连接杆7的一端连接套筒储存装置10,连接杆7的另一端与机器人机械臂末端9连接。
98.当需要更换套筒时,plc控制系统控制气缸4伸出,气缸4推动举升板6,并带动弹簧套102接触到垫圈105,钢珠103避开位置,连接杆7插进套筒1;然后气缸4回缩,弹簧套102挤压钢珠103,以压紧连接杆7。
99.实施例2
100.根据本发明的一个具体实施方案,下面说明本发明的机器人自动换取套筒装置进行详细说明。
101.本发明提供了一种机器人自动换取套筒装置,包括:机器人、支撑板5、气缸4、举升板6、多个套筒储存装置10、连接杆7和传感器3;
102.套筒储存装置10与支撑板5连接,用螺栓将套筒储存装置10固定在支撑板5上;
103.支撑板5上活动设置举升板6;
104.支撑板5呈倾斜状态,使套筒1放置方向更符合机器人作业姿态,并且利用套筒自身重力作用保持向下,避免套筒1在车间振动环境而脱离套筒放置盒2;
105.机器人机械臂末端9通过拧紧工具8连接套筒储存装置10;
106.套筒储存装置10包括套筒1、套筒放置盒2、钢珠护套101、钢珠103、弹簧套102和弹簧104;
107.套筒放置盒2与支撑板5连接;
108.套筒1上端设置有钢珠护套101,钢珠103位于钢珠护套101内;
109.钢珠护套101上端设有弹簧套102,弹簧104位于弹簧套102中;套筒储存装置10的上端设有垫圈105;
110.举升板6与弹簧套102连接,弹簧套102的下端设有伸出端,举升板6的一侧边缘的上方与弹簧套的伸出端1021的下表面接触;
111.钢珠护套101的上端设有伸出端,支撑板5的一侧边缘的下方与钢珠护套的伸出端1011的上表面接触;
112.套筒1上部与连接杆7接触。
113.套筒储存装置10上设有传感器3,用来接收和反馈信号;在每个套筒放置盒2背面安装有一个传感器3;
114.传感器3与plc控制系统连接,plc控制系统控制气缸4运动;
115.气缸4与举升板6连接,举升板6与弹簧套102连接,套筒储存装置10的上端设有垫圈105;
116.连接杆7的一端连接套筒储存装置10,连接杆7的另一端与机器人机械臂末端9连接。
117.当需要更换套筒1时,plc控制系统控制气缸4伸出,气缸4推动举升板6,并带动弹簧套102接触到垫圈105,钢珠103避开位置,连接杆7插进套筒1;然后气缸4回缩,弹簧套102挤压钢珠103,以压紧连接杆7。
118.工作原理:
119.在套筒库中,不同的套筒放置盒2储存不同的套筒1,每个套筒放置盒2放置位置同时会对应相应传感器3,检测套筒1编号和套筒1是否放置到位,传感器3会将信号反馈到控制系统,过程检测精确,储存套筒规格多,可以适应多种工作环境。
120.当进行更换套筒1作业时,机器人沿c方向(如图7所述)的反方向运动,当套筒1到达套筒放置盒2的预定位置时,传感器3接收套筒1到达信号并反馈给plc控制系统,然后plc控制系统控制气缸4向上运动举起举升板6,举升板6与弹簧套的伸出端1021接触,气缸4继续举起举升板6,把弹簧套102一同举升起来,使钢珠103和弹簧套102分离,钢珠103和连接杆7脱离,机器人带动连接杆7拔出套筒放置盒2,然后气缸4缩回恢复开始状态,之后进行抓取套筒1。
121.机器人抓取套筒1时,机器人带动连接杆7到达抓取套筒1准备位置,再沿着图5中a方向进入套筒放置盒2,在此过程中,钢珠103随着连接杆7的伸进而向弹簧套102内运动,当连接杆7到位与套筒1卡紧时,即机器人更换抓取到位状态时,钢珠103贴紧弹簧套102,此时钢珠103完全抵紧连接杆7,然后机器人带动连接杆7沿c方向拿出套筒1,使套筒1脱离套筒放置盒2,传感器3接收到套筒1脱离位置信号并反馈给plc控制系统,plc控制系统控制气缸4缩回恢复开始状态。
122.实施例3
123.本发明提供了一种机器人自动换取套筒的方法,使用本发明的机器人自动换取套筒装置;下面详细说明机器人自动换取套筒的方法。
124.当进行更换套筒1作业时,机器人机械臂末端9向靠近套筒储存装置的方向运动;
125.当套筒1到达套筒放置盒2预定位置时,设置在套筒放置盒2背面的传感器3接收套筒到达信号,并反馈给plc控制系统;
126.plc控制系统控制气缸4向上运动举起举升板6,举升板6推动弹簧套102接触套筒储存装置10的上端的垫圈105;
127.钢珠103避开位置,机器人的机械臂把连接杆7拔出来;
128.连接杆7带动套筒1脱离到位后,传感器3接收到套筒1脱离位置信号,传感器3信号发送信号给气缸,通知气缸缩回;
129.气缸4缩回到开始状态,开始进行抓取套筒1动作;
130.机器人抓取套筒1时,机器人带动连接杆7到达抓取套筒1准备位置,并沿垂直于举升板6的方向向下进入套筒放置盒2;
131.连接杆7推动钢珠103向弹簧套102内运动,当连接杆7到位与套筒1卡紧时,钢珠103贴紧弹簧套102并抵紧连接杆7;
132.机器人的机械臂带动连接杆7沿远离套筒储存装置10的方向取出套筒1,使套筒1脱离套筒放置盒2;
133.每个套筒放置盒2背面的传感器3接收到对应的套筒1脱离位置信号,并反馈给plc控制系统;
134.plc控制系统控制气缸4缩回恢复开始状态。
135.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。