1.本实用新型涉及水果加工技术领域,更具体地说,它涉及一种百香果取果肉装置。
背景技术:
2.百香果的果肉就是果瓤,果皮内的都是果瓤,果壳坚韧不可食用。百香果的果肉可以用于生产百香果酒、百香果饮料或其他食品,具有很高的经济价值。
3.现有百香果的取果肉方式是通过手工将百香果切开,再用刮刀或勺子之类的工具将果肉刮出。这种方式存在劳动强度大、效率低的技术问题。
技术实现要素:
4.本实用新型要解决的技术问题是针对现有技术的上述不足,本实用新型的目的是提供一种可以降低劳动强度的百香果取果肉装置。
5.本实用新型的技术方案是:一种百香果取果肉装置,包括接果台、控制模块,所述接果台的两侧分别设有横向对置的夹持机构、驱动所述夹持机构纵向往复运动的第一驱动机构,所述接果台的两侧还分别设有图像采集机构,所述接果台的纵向一侧设有分别设有果肉收集结构、果壳收集结构,所述果肉收集结构的上方设有取肉机构,所述接果台与果肉收集结构之间设有切果机构,所述控制模块电性连接所述夹持机构、第一驱动机构、取肉机构、切果机构、图像采集机构。
6.作为进一步地改进,两个所述夹持机构之间的接果台上设有定位结构。
7.进一步地,所述夹持机构包括机械爪、驱动所述机械爪张合的第二驱动机构、连接所述机械爪的滑动座,所述滑动座连接所述第一驱动机构。
8.进一步地,所述滑动座设有驱动所述机械爪横向往复运动的第三驱动机构。
9.进一步地,所述图像采集机构为摄像头。
10.进一步地,所述切果机构包括锯条、驱动所述锯条运动的第四驱动机构。
11.进一步地,还包括上料机构,所述上料机构包括料斗,所述料斗的出口设有衔接所述接果台的输送带。
12.进一步地,所述接果台设有与所述定位结构对齐的流道。
13.有益效果
14.本实用新型与现有技术相比,具有的优点为:
15.本实用新型通过夹持机构将百香果的两部分夹紧,然后将百香果切开,再通过图像判断百香果的好坏,若是好的则通过取肉机构取肉,否则直接送到果壳收集处,实现自动取果肉,可以降低工人的劳动强度。
附图说明
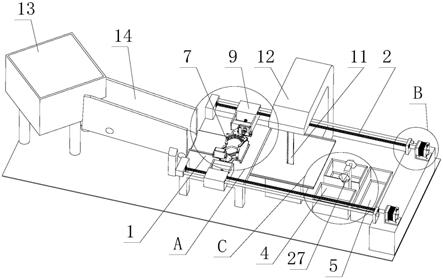
16.图1为本实用新型的结构示意图;
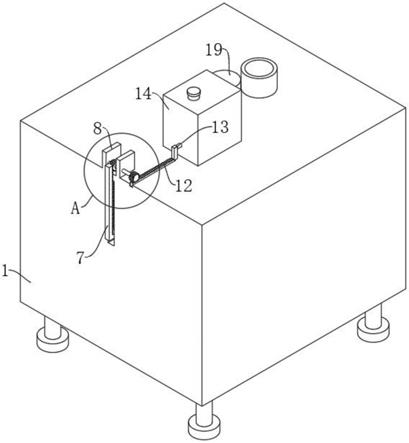
17.图2为图1中a处的放大图;
18.图3为图1中b处的放大图;
19.图4为图1中c处的放大图;
20.图5为本实用新型中切果机构的结构示意图;
21.图6为控制芯片的接线图;
22.图7为电源稳压模块、指示模块的接线图;
23.图8为boot启动方式模块、mico
‑
usb模块的接线图;
24.图9为步进电机控制模块的接线图;
25.图10为舵机模块、摄像头uart接口模块的接线图;
26.图11为控制芯片io引脚的接线图;
27.图12为晶振电路的接线图。
28.其中:1
‑
接果台、2
‑
第一驱动机构、3
‑
图像采集机构、4
‑
果肉收集结构、5
‑
果壳收集结构、6
‑
定位结构、7
‑
机械爪、8
‑
第二驱动机构、9
‑
滑动座、11
‑
锯条、12
‑
第四驱动机构、13
‑
料斗、14
‑
输送带、15
‑
流道、16
‑
直线导杆、17
‑
丝杠、18
‑
第一电机、19
‑
固定座、20
‑
第三丝杆、21
‑
连接座、22导向槽、23
‑
主动带轮、24
‑
从动带轮、25
‑
导向轮、26
‑
u型架、27
‑
取肉刀、28
‑
取肉电机。
具体实施方式
29.下面结合附图中的具体实施例对本实用新型做进一步的说明。
30.参阅图1
‑
5,一种百香果取果肉装置,包括接果台1、控制模块。接果台1的两侧分别设有横向对置的夹持机构、驱动夹持机构纵向往复运动的第一驱动机构2,接果台1的两侧还分别设有图像采集机构3,接果台1的纵向一侧设有分别设有果肉收集结构4、果壳收集结构5,果肉收集结构4的上方设有取肉机构,接果台1与果肉收集结构4之间设有切果机构,控制模块电性连接夹持机构、第一驱动机构2、取肉机构、切果机构、图像采集机构3。
31.两个夹持机构之间的接果台1上设有定位结构6,用于对百香果进行定位,使百香果最长的两端与两个夹持机构对齐,可以使夹持机构方便从百香果的两侧将两部分夹紧。定位结构6的底部设有电性连接控制模块的称重压力传感器,用于检测定位结构6中是否有果。
32.在本实施例中,定位结构6为定位槽。
33.在其他实施例中,定位结构6可以为开口的多边形板结构或开口的环形板结构。
34.夹持机构包括机械爪7、驱动机械爪7张合的第二驱动机构8、连接机械爪7的滑动座9,滑动座9连接第一驱动机构2。机械爪7采用现有成熟的产品,第二驱动机构8为舵机或步进电机或伺服电机或气动马达,舵机优选为单轴总线舵机,第二驱动机构8通过旋转运动驱动机械爪7张合,从而实现机械爪7夹紧百香果。
35.在本实施例中,第一驱动机构2包括直线导杆16、丝杠17、第一电机18,直线导杆16、丝杠17安装在固定座19上并纵向布置,直线导杆16穿过滑动座9,并与滑动座9滑动连接,丝杠17分别穿过滑动座9,并与滑动座9螺纹连接,第一电机18的转轴通过联轴器连接丝杠17,第一电机18带动丝杠17旋转从而实现滑动座9沿直线导杆16往复运动。第一电机18为步进电机或伺服电机。
36.在其他实施例中,第一驱动机构2可以为直线电机或电动推杆或伺服气缸或伺服
电缸或齿轮齿条机构。
37.滑动座9设有驱动机械爪7横向往复运动的第三驱动机构,在本实施例中,第三驱动机构包括第三丝杆20、第三电机,第三电机安装在滑动座9内部,第三丝杆20通过轴承安装在滑动座9上,机械爪7的后端设有连接座21,第三丝杆20与连接座21通过螺纹连接,滑动座9的两侧设有安装连接座2的导向槽22,导向槽22横向布置,第三电机带动第三丝杆20旋转,从而实现驱动机械爪7横向往复运动。第三电机为步进电机或伺服电机。
38.在其他实施例中,第三驱动机构可以为电动推杆或气缸或曲柄滑块机构。
39.图像采集机构3安装在滑动座9上,图像采集机构3为摄像头,优选的,图像采集机构3为高清摄像头。当然图像采集机构3也可以采用现有成熟的视觉检测模块,如型号为ca
‑
hx500mca
‑
hx500c的基恩士视觉相机 型号为cv
‑
x4系列的基恩士视觉控制器,视觉检测模块可以直接输出百香果好坏的结果到控制模块。
40.切果机构包括锯条11、驱动锯条11运动的第四驱动机构12。在本实施例中,锯条11为环形柔性锯条,第四驱动机构12包括主动带轮23、从动带轮24、两个导向轮25、u型架26,主动带轮23连接有第四电机,u型架26横向放置,主动带轮23、从动带轮24水平设置在u型架26的底部,两个导向轮25水平设置在u型架26的顶部,主动带轮23、从动带轮24、两个导向轮25形成矩形结构,第一驱动机构2位于u型架26的底部和顶部之间,锯条11的一侧位于两侧第一驱动机构2之间。第四电机带动主动带轮23转动从而驱动锯条11绕主动带轮23、从动带轮24、两个导向轮25循环转动。
41.在其他实施例中,锯条11为长条形的锯条,锯条11为竖直布置在两侧第一驱动机构2之间,第四驱动机构12为电动推杆或气缸或曲柄滑块机构,第四驱动机构12通过龙门架安装在两侧第一驱动机构2的上方,第四驱动机构12驱动锯条11上下往复运动,以实现切割。
42.取肉机构包括两把分别与两部分百香果对应的取肉刀27、以及驱动现个取肉刀27转动的取肉电机28,两把取肉刀27水平布置。果肉收集结构4包括两个果肉收集箱,两个果肉收集箱分别位于两把取肉刀27的正下方。果壳收集结构5为一个果壳收集箱,果壳收集箱位于取肉刀27远离接果台1的一侧。
43.本装置还包括上料机构,上料机构包括料斗13,料斗13的出口设有衔接接果台1的输送带14。接果台1设有与定位结构6对齐的流道15,流道15的一端与输送带14对齐。输送带14从料斗13逐个将百香果输送到流道15,百香果沿流道15运动到定位结构6实现定位。
44.控制模块为单片机模块或plc或工控机。
45.单片机模块如图6
‑
12所示,包括电源稳压模块、与电源稳压模块连接的指示模块、控制芯片u4、boot启动方式模块、micro
‑
usb模块、复位电路、步进电机控制模块、直流电机控制模块、舵机模块、摄像头uart接口模块和晶振电路。电源稳压模块包括220v交流电压输入接线柱1和2、电源开关s1、保险丝f1、变压器t1、整流桥d1,电容c1、c2和电解电容ec1起滤波作用,最终输出12v直流电压。电压转换芯片u2输入12v电源,经转换得到5v电压,电压转换芯片u3输入12v电源,经转换得到3.3v电压,电容c3、c4、c5、c6起滤波作用;指示模块包括串联一起的电阻r8和指示灯led1,其中电阻r8一端接12v电压,指示灯led另一端接地。控制芯片u4的型号为stm32f103c8t6,在控制芯片u4一个i/o引脚上连接复位电路,该复位电路中的3.3v上电时,c7充电,在10k电阻r7上出现电压,使得控制芯片u4复位,几个毫秒后,c7
充满,10k电阻r7上电流降为0,电压也为0,使得控制芯片u4进入工作状态,工作期间,按下k1,c7放电,在10k电阻r7上出现电压,使得控制芯片u4复位,松开k1,c7又充电,几个毫秒后,控制芯片u4进入工作状态,电阻r6为限流电阻。在boot启动方式模块中,p1为启动模式选择排针,电阻r3和r4为限流电阻,本电路默认选择boot0=1,boot1=0,设置为isp下载方式,通过接线端j1与串口连接进行程序下载,可以对控制芯片u4的系统进行快速升级。micro
‑
usb模块中,该模块由usb
‑
mrico插座和电阻r2、r5和上拉电阻r1组成,可为控制芯片u4供电和与pc端进行通讯。步进电机控制模块包括第一电机驱动芯片b1、第二电机驱动芯片b2,两个电机的驱动芯片的信号输入对应连接在控制芯片u4的i/o引脚上,第一电机驱动芯片b1的控制输出引脚对应连接其中一个第一电机18,第二步进电机驱动芯片b2的控制输出引脚对应连接另一个第一电机18。直流电机控制模块包括第一直流电机驱动芯片u5,直流电机的驱动芯片的信号输入对应连接在控制芯片u4的i/o引脚上,第一直流电机驱动芯片u5的控制输出引脚对应连接输送带14的直流电机(输送带14是由直流电机驱动的)。舵机模块的两个单轴总线舵机m4和m5的pwm输入信号引脚对应连接在控制芯片u4的i/o引脚上,两个舵机m4和m5分别控制两只机械爪7的张合。摄像头uart接口模块中,排针p4与控制芯片u4的i/o相连,以便外接摄像头。晶振电路模块包括两部分,一部分组成外部高速时钟,一部分组成外部低速时钟,其中电容c8、c11和晶振y2组成u4的8mhz的外部高速时钟,提供精准的系统时钟,另一部分由电容唐c9、c10和晶振y1组成u4的32.768khz的外部低速时钟,提供精准的定时服务。io引脚由排针p3、p2组成,实现与外部的信号交互和设置。第四电机m8为220v交流电机,该电机接在电源稳压模块电路中。
46.本装置的工作过程:
47.将百香果放置在料斗13中,并接通220v交流电源并按下电源开关s1使装置处于开始工作;
48.工作时,输送带14开始把百香果平稳的传送到接果台1的定位结构6中,定位结构6下的称重压力传感器检测到有果时,第三电机带动第三丝杆20,使机械爪7直线向定位结构6方向移动,移动到位后,单轴总线舵机驱动机械爪7将百香果的两端夹紧,第一驱动机构2驱动机械爪7向锯条11方向移动,百香果被切成两部分后,第三电机带动第三丝杆20反向运动,使两个机械爪7分离至设定间隔,通过图像采集机构3检测百香果肉好坏,如果检测到果肉是好的,则将其移动到取肉机构处将果肉取出,再将果壳输送到果壳收集结构5,如果检测到果肉是坏的,则直接将该果输送到果壳收集结构5。
49.以上仅是本实用新型的优选实施方式,应当指出对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些都不会影响本实用新型实施的效果和专利的实用性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。