1.本实用新型涉及避障机器人的技术领域,特别是涉及一种新型智能避障机器人。
背景技术:
2.机器人教育是指通过设计、组装、编程、运行机器人,激发学生学习兴趣、培养学生综合能力。机器人的发明、研究及应用实践是以科学研究和社会生产为需求的,进入到教育是其领域的扩大与发展,教育机器人的趣味性是一项极为重要的指标,直接决定了学生对该款产品的兴趣和热情,一定程度上影响了机器人教育的效果。由于它所涉及知识的广泛性和涉及技术的综合性,这都使得机器人对教育而言具有更多的价值。
3.目前用于教育的避障机器人的结构过于复杂,开发以及制造的成本过高,同时又复杂的逻辑的更导致了相关机器人的操作繁琐,且避障机器人在逃跑过程中的运动轨迹随机,不可预测危险,使得机器人在逃跑过程中容易撞击障碍物,造成机器人以及物品损伤。
4.因此缺乏的避障保护系统,降低了教育型机器人的趣味性,从而限制了教育机器人的教学效果,因此急需一种新型智能避障机器人,提高避障机器人操作的便捷性,以及提高避障机器人的趣味性。
技术实现要素:
5.为解决上述技术问题,本实用新型提供了一种新型智能避障机器人。
6.本实用新型解决其技术问题所采用的技术方案是:
7.一种新型智能避障机器人,包括机架,所述机架内设置有驱动机构、电源机构和控制机构;
8.所述驱动机构用于带动机架移动,所述驱动机构包括驱动件与支撑件,所述驱动件用于驱动支撑件动作;
9.所述电源机构用于对驱动机构与控制机构提供电能,所述电源机构包括内部电源组件与外部电源组件;
10.所述控制机构包括控制组件与检测组件,所述检测组件用于收集外部信号并传送给控制组件,所述检测组件包括前端检测件与后端检测件,所述前端检测件至少包括一个前端检测传感器,所述后端检测件至少包括一个后端检测传感器;
11.所述机架上还设有供检测组件进行安装的安装机构,所述安装机构包括供前端检测传感器进行安装处理的检测立架。
12.优选的,所述安装机构还包括设置在检测立架上用于对前端检测传感器与后端检测传感器进行调节固定处理的调节板,所述调节板可拆卸设置在检测立架上;
13.所述检测立架竖直设置在机架顶部,所述检测立架上设有供调节板进行可拆卸安装的安装孔。
14.优选的,所述调节板设置为l型,l型所述调节板上设有供前端检测传感器与后端检测传感器穿设的固定孔,所述前端检测传感器与调节板均设有多个;
15.所述控制组件设置为控制器,所述前端检测传感器与后端检测传感器均与控制器连接。
16.优选的,所述检测组件还包括急停组件,所述急停组件包括前急停开关与后急停开关,所述前急停开关固定设置在机架侧壁上,所述前急停开关和后急停开关均与控制器连接。
17.优选的,所述安装机构还包括供后急停开关进行安装的急停安装件,所述急停安装件包括水平设置的安装架,所述安装架设置在机架一侧且与机架固定连接,所述后急停开关设置在安装架上远离机架一侧。
18.优选的,所述驱动件包括设置在机架上的直流电机,所述直流电机上设有驱动轴,所述驱动件还包括设置在驱动轴上的驱动齿轮;
19.所述支撑件包括多个驱动轮,多个所述驱动轮转动连接在机架底部,所述支撑件还包括设置在驱动轮上的转轴,所述转轴通过齿轮与驱动齿轮啮合连接。
20.优选的,所述支撑件还包括设置在安装架底部的万向支撑轮,所述万向支撑轮铰接在安装架的底壁上;
21.优选的,所述内部电源组件包括内电池组以及供内电池组进行安装处理的电池壳。
22.优选的,所述外部电源组件用于连接外部电源给内部电池组进行充电处理,所述外部电源组件包括变压模块与充电模块。
23.本实用新型的有益效果:
24.1、将多个检测传感器设置在检测立架上,分别对避障机器人的前进方向与后退方向进行检测处理,并将检测的信号传送给控制机构,由控制机构对检测的信号进行分析,并控制直流电机进行转动,实现直流电机的正转与反转,达到避障机器人自动避障的效果。
25.2、利用多个检测传感器的设置,提高避障机器人对外部的检测范围,提高避障机器人对外部环境检测效果,以及提高避障机器人在教学过程中的使用效果,达到教学目的;
26.3、将急停组件设置在避障机器人上,在使得避障机器人在逃脱中触碰其他障碍物后,急停开关将会对应触发信号传送给控制器,控制器将快速调整直流电机的转动方向,进一步实现避障的效果。
附图说明
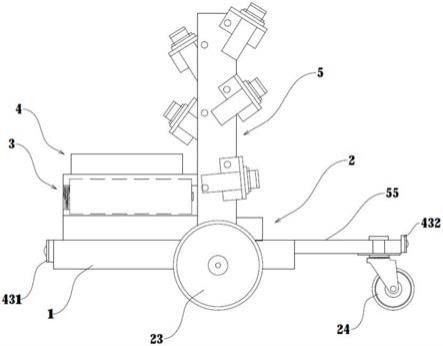
27.图1为本技术实施例的整体结构示意图;
28.图2为本技术实施例的驱动机构以及检测机构的局部结构示意图;
29.图3为本技术实施例的调节板的俯视图;
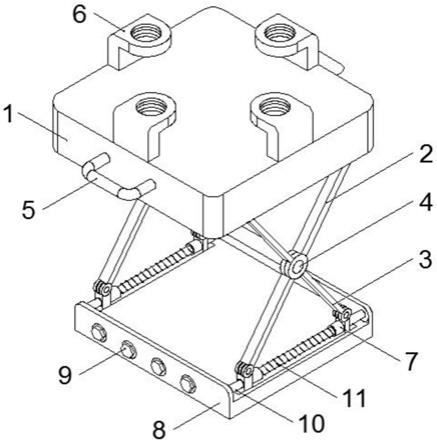
30.图4为本技术实施例的急停安装件的局部结构示意图;
31.图5为本技术实施例的控制机构的组成框图。
32.其中,1、机架;2、驱动机构;21、驱动件;22、支撑件;23、驱动轮;24、万向支撑轮;3、电源机构;31、内部电源组件;33、内电池组;34、电池壳;4、控制机构;41、控制组件;42、检测组件;421、前端检测传感器;422、后端检测传感器;43、急停组件;431、前急停开关;432、后急停开关;411、控制器;5、安装机构;51、检测立架;52、调节板;53、安装孔;54、急停安装件;55、安装架;56、固定孔。
具体实施方式
33.为了加深对本实用新型的理解,下面将结合附图和实施例对本实用新型做进一步详细描述,该实施例仅用于解释本实用新型,并不对本实用新型的保护范围构成限定。
34.实施例
35.参考图1和图2,为本实用新型公开的一种新型智能避障机器人,包括机架1,机架1上设有驱动机构2、电源机构3、控制机构4以及安装机构5,驱动机构2用于带动机架1移动,驱动机构2包括用于支撑机架1的支撑件22以及用于驱动支撑件22移动的驱动件21,电源机构3用于对驱动机构2和控制机构4提供电能;控制机构4用于检测检测机架1的周围环境信号并接收信号进行分析,安装机构5包括竖直设置在机架1上的检测立架51,安装机构5供零部件进行安装。
36.参考图1和图2,控制机构4包括对外部环境进行检测处理的检测组件42,还包括对检测组件42进行信号分析处理的控制组件41,以及包括对避障机器人进行急停处理的急停组件43。检测组件42包括前端检测件与后端检测件,前端检测件用于对避障机器人的前进方向进行信号检测处理,并将检测的信号传送给控制组件41;后端检测件用于对避障机器人后退方向进行检测处理,同时将检测的信号传送给控制组件41。
37.参考图2和图3,前端检测件至少包括一个前端检测传感器421,具体的前端检测传感器421设置有三个,三个前端检测传感器421设置在检测立架51上,且三个前端检测传感器421分别用于对准避障机器人前进方向的上中下三个方位。检测立架51上设有用于安装多个前端检测传感器421的调节板52,多个调节板52可拆卸设置在检测立架51的侧壁上。检测立架51上设有供多个调节板52进行安装处理的安装孔53,且多个安装孔53上中下均匀分布,调节板52设置为l型,同时在调节板52上设有多个供前端检测传感器421进行安装的固定孔56,将前端检测传感器421穿设在固定孔56中,利用多个前端检测传感器421提高检测范围与检测精度,减小避障机器人在行动过程中遇到的障碍。
38.后端检测件至少包括一个后端检测传感器422,具体的后端检测传感器422设置有三个,三个后端检测传感器422均安装在调节板52上,且多个后端检测传感器422用于检测避障机器人后端的信号,且三个后端检测传感器422对应三个前端检测传感器421设置。
39.参考图1和图2,控制组件41设置为控制器411,控制器411用于接收前端检测件与后端检测件的检测信号,并根据检测信号进行判断,最后输送命令控制驱动机构2动作,实现避障处理的功能。前端检测传感器421与后端检测传感器422均与控制连接,控制器411优选为型号为stc8h1k16控制芯片,多个检测传感器检测到周围物体信号时,前端检测传感器421或者后端检测传感器422上感应头的输入信号由高频变为低频信号,并将信号传送给控制器411,由控制器411完成信号处理控制电机正反转,实现避障机器人自动避障的效果。
40.参考图1和图2,急停组件43包括前急停开关431与后急停开关432,前急停开关431设置在机架1的侧壁上,前急停开关431可以设置多个,将多个前急停开关431设在机架1的侧壁上,在避障机器人在逃脱中触碰到障碍物后,前急停开关431将会触发信号传送给控制器411,由控制器411输送信号给电机反转,电机反转带动机架1向相反方向移动,实现避障处理。
41.参考1和图4,安装机构5还包括供后急停开关432进行安装的急停安装件54,急停安装件54包括与机架1固定连接的安装架55,后急停开关432设置在安装架55上远离机架1
的一侧,利用后急停开关432进一步提高避障机器人的避障处理功能。
42.参考图1和图2,驱动件21包括设置在机架1上的直流电机,直流电机上设有转动连接的转动轴,转动轴上设有同轴心的驱动齿轮,直流电机在接收到信号后,驱动转动轴转动,转动轴上的驱动齿轮跟随转动,进入由驱动齿轮带动支撑件22转动,实现避障机器人的移动功能。驱动组件还包括驱动模块,驱动模块与电源模块连接,电源经过驱动模块转化后将电信号传送给直流电机,由直流电机带动驱动轮23转动,实现避障机器人的移动。
43.支撑件22包括多个转动设置驱动轮23,以及连接多个驱动轮23的转轴,转轴转动设置在机架1的底部,且转轴通过齿轮与驱动齿轮齿纹啮合连接。支撑件22还包括设置在安装架55底部的万向支撑轮24,万向支撑轮24铰接在安装架55的底壁上,利用万向支撑轮24的设置提高避障机器人转弯的灵活性。
44.电源机构3包括内部电源组件31与外部电源组件,内部电源组件31包括设置在机架1上的内电池组33以及供内电池组33进行安装的电池壳34,外部电源组件用于内部电池组充电,包括连接外部电源充电模块以及对外部电源进行变压处理的变压模块。利用外部电源组件接通电源并对内电池组33进行充电,提高避障机器人的能力。
45.参考图1至图5,避障机器人在移动过程中,多个前端检测传感器421与后端检测传感器422对避障机器人的外部环境进行检测处理。多个前端检测传感器421与后端检测传感器422实时的将检测信号传送给控制器411,利用控制器411对检测信号进行检测分析。当物体接近检测传感器的探头处20cm
‑
40cm时,检测传的输入信号由高电平变为低电平,控制器411内接受到低电平信号后,向驱动模块发出动作指令,使得直流电机由正转变为反转,进而实现自动避障处理的效果。
46.同时避障机器人在逃脱中触碰到障碍物,障碍物触碰到前急停开关431或后急停开关432的触发信号,触发信号立刻传送到控制器411,由控制器411发送信号给驱动模块,进而调整直流电机的移动方向,实现避障功能。
47.上述实施例不应以任何方式限制本实用新型,凡采用等同替换或等效转换的方式获得的技术方案均落在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。