描述
1.本发明涉及用于对数控机床上的热导致的位置变化进行补偿的方法和装置,尤其涉及基于特征图对数控机床上的热导致的位置变化进行补偿或校正。
背景技术:
2.在现有技术中,已知的是,当在机床上加工工件时,机床上的热致位置误差会对加工精度产生重大影响。因此,原则上,特别是在加工工件时,需要例如通过机床的控制装置中的主动温度控制和/或补偿来减少机床上的与温度相关的位置变化或减少该位置变化对加工精度的影响。
3.这里,一种选择是机床或机床环境的主动温度控制或冷却,旨在减少对机床的温度影响;例如参见公开号为de 10 2014 202 878 a1的德国专利。
4.另一种选择是机床的控制装置中的补偿,例如在机床的控制装置处执行机器轴的位置目标值的温度相关的校正。这在现有技术中是可能的,例如,通过测量机床上温度传感器处的温度,其中测量的温度用于通过计算公式计算校正参数,通过校正参数在机床的控制装置处实时校正或调整目标轴的位置;例如参见公开号为de 10 2010 003 303 a1的德国专利。
5.此外,在公开号为de 10 2015 115 838 a1的德国专利中,提议使用具有神经网络的评估单元对加工机器进行温度补偿。
6.在机床的控制装置处的机床轴的位置目标值的温度相关的校正的一种更新颖的方法是称为基于图像的机床位置变化的校正或补偿,例如参见于2017年3月9日在第三届萨克森自动化日发表的以下这篇文章:kennfeldbasierte korrektur thermischer positionierfehler an werkzeugmaschinen"by c.naumann,fraunhofer institute for machine tools and forming technology
‑
iwu
‑
,chemnitz;verbundinitiative maschinenbau sachsen
‑
vemas
‑
,chemnitz:digitalisierung in der produktion.3.tag der automation 2017:09.2017。
7.上述这篇文章描述了基于特征图的机床热定位误差的校正。文章的“摘要”部分描述了:“机床上的热致定位误差可能对加工精度产生重大影响,从而影响机床的产品质量和盈利能力。热致误差可能占机器的总误差的75%。减少这些误差的方法从建设性措施到使用低膨胀系数材料,再到基于模型的热致误差的校正。工业中用于减少热弹性误差的措施例如是机床的热对称设计或实现机床的热稳定状态。为此,通常在热源区域冷却机器或对机器进行加热,直到其达到热稳定(已达到“工作温度”)。另一项举措是对环境进行空气调节,以创造恒定的条件。所述方法显著增加了能源需求,导致盈利能力下降。作为一种无需额外的能源需求的基于模型的方法,相关校正被用于工业部门。相关模型在机器结构中选定的温度测量点和在作用点(工具中心点,tcp)处的位移之间进行调节。基于图像的校正代表了这种相关方法。借助特征图,直接将机床表面温度和当前轴结构映射到工具中心点处
的位移。可以通过来自测量或热弹性仿真的数据设定特征图,然后可以在线使用特征图,并在处理过程中将特征图集成到控制中。在概述了热弹性校正和补偿策略之后,这篇文章介绍了基于图像的校正。讨论了该方法的步骤和优缺点,最后通过实验在演示器上证明了该方法的功能。”8.从简单、高效、准确和/或用户友好的机床温度补偿的基本需求出发,并从根据上述现有技术的基于图像或模型的机床温度补偿的优点出发,本发明的目的是提供对机床的改进的温度补偿。
技术实现要素:
9.为了实现上述目标,根据独立权利要求提出了用于对数控机床中的热导致的位置变化进行补偿的方法和装置。从属权利要求涉及优选的或特别有利的示例性实施例。
10.根据示例性方面,提出了一种用于对数控机床上的热导致的位置变化进行补偿的方法,包括:提供描述在机床的控制装置上的机床温度特性的特征图,通过机床上的一个或多个温度传感器确定一个或多个温度值,根据所确定的一个或多个温度值和所提供的特征图确定机床的控制装置上的一个或多个补偿参数,并根据所确定的一个或多个补偿值对机床上的与温度相关的位置变化进行补偿。
11.根据本发明,一种用于对数控机床上的热导致的位置变化的方法,尤其是基于图像的方法,其特征在于,通过计算机实现的神经网络对所提供的特征图(或特征曲线地图)进行调整,具体是通过特征图而不是直接通过神经网络进行温度补偿。
12.换言之,根据本发明特别优选地提出的是,基于特征图(即,基于图像的机床的热致定位误差的校正)对机床的控制装置进行温度补偿,通过神经网络至少一次或几次地调整特征图。
13.这具有协同优势,其在于,基于所提供的特征图,可高效且用户友好,且极其快速,且准确地对机床的控制装置实时执行温度补偿,其中,根据需要,通过训练神经网络或通过已训练的神经网络,例如基于fe(有限元)仿真创建的特征图是最佳的。
14.根据本发明,可提出一种用于调整描述数控机床的温度特性的特征图的方法,其作为用于补偿机床上的热导致的位置变化的示例,所述方法包括:通过计算机实现的神经网络调整所提供的特征图。
15.下面讨论本发明的其它示例性方面或示例性实施例和优选实施例。
16.在一些优选示例性实施例中,可在机床运行期间,特别是在机床工作过程中实时确定神经网络的输入数据。
17.在一些优选示例性实施例中,神经网络的输入数据可包括来自机床的传感器的传感器数据和/或从机床的传感器的传感器数据计算得到的输入数据。
18.在一些优选示例性实施例中,根据神经网络的输出数据调整或更新特征图。在进一步优选示例性实施例中,神经网络的输出数据可以规定经调整或更新的特征图。
19.在一些优选示例性实施例中,调整特征图可以包括:将控制装置当前提供的特征图的至少一部分读取到神经网络中;将输入数据(尤其包括来自机床的传感器的传感器数据)读入神经网络;和/或确定神经网络上的经调整或更新的特征图的至少一部分的网络结构。
20.在一些优选示例性实施例中,可以特别基于所确定的网络结构来调整或更新控制装置提供的特征图。
21.在一些优选示例性实施例中,可借助计算机实现的神经网络(尤其优选定期)重复地执行对所提供的特征图的调整。
22.在一些优选示例性实施例中,神经网络可控制机床的控制装置提供的特征图。
23.在一些优选示例性实施例中,可将来自机床的一个或多个温度传感器的传感器值传输到神经网络,该传感器值作为神经网络的输入数据,用以调整所提供的特征图。
24.在一些优选示例性实施例中,可将来自机床的一个或多个位置传感器的传感器值传输到神经网络,该传感器值作为神经网络的输入数据,用以调整所提供的特征图。
25.在一些优选示例性实施例中,机床的一个或多个位置传感器可输出其感测到的机床的线性轴和/或旋转轴的实际值。
26.在一些优选示例性实施例中,可将机床的线性轴和/或旋转轴的目标值从控制装置传输到神经网络,该目标值作为神经网络的输入数据,用以调整所提供的特征图。
27.在一些优选示例性实施例中,可将在机床上执行的位置测量方法的位置测量值传输到神经网络,该位置测量值作为神经网络的输入数据,用以调整所提供的特征图。
28.在一些优选示例性实施例中,可通过一个或多个测量探头对机床执行位置测量方法。此外,另外或可选地,可通过一个或多个电磁测量装置和/或一个或多个光学测量装置,特别是通过激光测量装置和/或相机装置对机床执行该位置测量方法。
29.在一些优选示例性实施例中,可基于机床的一个或多个fe模型和/或fe仿真提供描述机床的温度特性的特征图。
30.在一些优选示例性实施例中,可将神经网络集成到机床的控制装置中。
31.在一些优选示例性实施例中,可将神经网络集成到连接到机床的控制装置的控制计算机中。
32.在一些优选示例性实施例中,可将神经网络集成到连接到机床的控制装置的中央服务器中。
33.在一些优选示例性实施例中,可将中央服务器连接到机床的多个控制装置。
34.在一些优选示例性实施例中,中央服务器可包括多个神经网络。每个神经网络可以优选地与机床中的其中一个相关联,和/或多个神经网络可以彼此进行通信。
35.在一些优选示例性实施例中,该方法还可包括:基于特征图的特征图条目确定位移图。
36.以下通过对附图的描述和解释描述了上述各个方面和特征的优点及更具体的实现方式以及其它方面及其优点,对附图的描述和解释不具有任何限制性。附图的简要说明
37.图1示出了根据本发明示例性实施例的用于对机床进行温度补偿的特征图kf的示意性示例图。
38.图2示出了根据本发明示例性实施例的用于对机床进行温度补偿的多个特征图的示意性示例图。
39.图3示出了用于对机床进行温度补偿的基于图像的方法的示意图。
40.图4示出了用于对特征图进行更新的神经网络的应用的示意图,该特征图用于对
机床进行温度补偿的基于图像的方法。
41.图5以示例方式示出了根据本发明示例性实施例的系统的示意图,该系统用于对一个或多个机床的一个或多个特征图进行调整。优选实施例和附图的详细说明
42.在下文中,参考附图详细描述本发明的示例或示例性实施例。附图中相同或相似的元件可以用相同的附图标记进行表示,但有时也用不同的附图标记进行表示。
43.应注意,本发明并不以任何方式受限于或局限于下面描述的示例性实施例及其实现特征,而是还包括对示例性实施例作出的修改,尤其是那些通过修改所述示例的特征或通过组合所述示例的单个特征或多个特征而包括在独立权利要求保护范围内的特征。
44.机床的热弹性效应是当前造成机床定位误差的主要原因之一。除了摩擦和加工过程产生的热量输入外,与环境的热交换也不容忽视。为了确定这些热流以及由此导致的温度和变形图,可能需要对流体和结构力学进行复杂的耦合仿真。特别是,由于环境条件以及传热系数不断变化,两种仿真的耦合使得使用移动部件进行瞬态仿真计算变得困难。
45.为了减少机床上的热致位置误差,工业上广泛采用的措施是使机床处于热稳定状态。为此,通常可以在热源区域中对机床进行冷却或预热直至机床被加热至热稳定(即达到“工作温度”)。另一种可能的措施是对环境进行空气调节,以创造恒定的条件。所述方法显著增加了能源需求,从而导致盈利能力下降。
46.另一方面,基于模型或基于图像的校正方法不需要任何额外的能量输入。在工业部门,相关校正被用作基于模型的方法。基于图像的模型通常在机器结构中选定的温度测量点和在作用点例如工具位置(通常也称为工具中心点或tcp)的位移之间进行调整。
47.近来提出了基于图像的校正方法;例如参见下面这篇文章:"kennfeldbasierte korrektur thermischer positionierfehler an werkzeugmaschinen"by c.naumann,fraunhofer institute for machine tools and forming technology
‑
iwu
‑
,chemnitz;verbundinitiative maschinenbau sachsen
‑
vemas
‑
,chemnitz:digitalisierung in der produktion.3rd saxon day of automation 2017:march 9th,2017.
48.在基于特征图的校正方法的情况下,温度补偿基于指示机器的温度特性的至少一个特征图。
49.特征图可被视为数据结构,尤其是回归模型,该特征图指示或表示从一个或多个输入变量到一个或多个输出变量的映射。在从输入变量映射到输出变量的情况下,其也可称作特征曲线。
50.特征曲线是两个相互依赖的物理量的图形表示,这两个物理量例如是部件、组件或设备的特征。该特征曲线可以在二维坐标系中显示为曲线。
51.特征曲线图,或简称特征图,例如可以以多个特征图的形式或在三维坐标系中表示作为进一步输入变量的函数的多个特征图。
52.特征曲线的一个例子是流过二极管的电流对电压的依赖性。如果进一步将二极管的温度添加为参数,则该特征曲线成为由多条电流
‑
电压特征曲线组成的特征曲线图,该多条电流
‑
电压特征曲线与特定温度相关联。在控制工程中,特征曲线描述系统的静态特性。在实践中,特征曲线尤其用于定义工作点,用以确定特征曲线的某个点的线性近似值。特征曲线还可用于确定部件的功率损耗或校正传感器的信号输出。
53.对于基于图像的校正或温度补偿,特征图可理解为一组输入变量到一维位移或一维补偿参数的连续映射。最重要的输入变量通常是机器结构上和机器结构中的温度(例如,通过设置在机器结构中的传感器位置,例如设置在机床的床身上、机床的可移动部件上、机床的可旋转部件或可枢转部件上的一个或多个温度传感器记录或测量的温度)以及可选的机器轴的位置数据。
54.由于在一些示例性实施例中,可在位移校正中寻找位置变化(例如,在tcp位置的与温度相关的位置变化)的3维或6维校正向量,可以为这些校正向量中的每一个创建不同的映射,或者可以提供具有多个输出变量的多维映射。
55.在进一步的示例性实施例中,可以使用一个或多个替代变量替代位置变化作为输出变量,并且如果需要,使用下游模型将这些变量转换为位移。
56.示例性实施例涉及在行业中结合神经网络的特征图的新应用。
57.目前,在示例性实施例中,可以借助fe(有限元)网格来表示机器或机床。
58.除了先前使用的传感数据或传感器值(例如,温度值)之外,来自控制装置的数据或参数也可用于进一步的示例性实施例中的fe分析。
59.例如,这类控制数据可以是来自控制(例如,驱动控制:电流控制、速度控制、位置控制)、监控、诊断和/或电机、机械和/或位置检测(例如,机床驱动器的电机电流或电机功率)的数据。
60.根据一些示例性实施例,从分析机器或机床的一个或多个fe(有限元)模型开始通过数据处理方法或基于计算机的仿真对机器进行完整分析,可以生成或计算优选描述机器或机床的温度特性的一个或多个特征图。
61.在进一步的示例性实施例中,除了基于fem(有限元法)的仿真计算一个或多个特征图之外,或者作为基于fem的仿真计算一个或多个特征图的替代方案,还可以基于机床(即所谓的虚拟机床或数字孪生)的计算机仿真来计算、确定和/或调整特征图。另外或可选地,还可以基于在测试操作中的机床实验测定来确定和/或调整特征图。
62.这里,特征图是n维映射的示例,该n维映射可用作回归模型和/或与插值法或外插法结合使用。
63.在一些示例性实施例中,特征可以是表格或矩阵的形式,并且可以为可能的输入数据(例如,一个或多个输入变量)指定输出数据(例如,一个或多个输出变量),或者可以将一个或多个输入变量值映射到一个或多个输出变量值。
64.除了指示温度信息的输入数据之外,例如,可以指示来自机床上的温度传感器的一个或多个温度值,还可以使用进一步的输入数据或输入变量。该输入数据或输入变量还可能包括来自机床和/或机床附近的空气湿度传感器和/或空气压力传感器的测量值。
65.此外,该输入数据或输入变量还可包括位置传感器值(例如,来自机床的可移动部件,比如线性轴、转轴和/或枢轴上的位置测量仪器)和/或来自机床的控制装置的参数。
66.从机床的控制装置中获取的参数或由机床的控制装置确定或评估的参数可能包括:例如,机床的轴的目标位置值、机床的轴的经确定的实际位置值、速度(例如主轴速度)、电机电流、电机功率,等等。
67.此外,其它传感器值也可用作输入变量,这些传感器值可以是比如压力测量值(例如,机床的液压和/或气动系统中的压力值,机床的冷却回路系统中的压力值,等等),振荡
或振动测量值(例如,来自振荡或振动传感器的振荡或振动测量值),力测量值(例如,来自力传感器、应变计传感器的力测量值,等),扭矩测量值(例如,来自扭矩传感器或基于力测量值的计算的扭矩测量值),有功功率值,加速度测量值(例如,来自加速度传感器),结构声值(例如,来自结构声传感器),等等。
68.在一些示例性实施例中,例如,可以通过评估传感器和/或控制数据,基于输入的输入变量将用于温度位移的控制内补偿的校正项或一个或多个校正参数在时间上离散的部分重复或周期性地传输到机床的控制装置,其中机床的控制装置可随后使用传输的校正项或一个或多个校正参数来执行温度补偿,例如通过基于传输的校正项或一个或多个校正参数调整机床的一个或多个可移动部件的目标位置(例如,机床的线性轴、旋转轴和/或枢轴),从而执行温度补偿。
69.根据示例性实施例,优选地,还实现了可以使用新数据更新特征图的神经网络结构。
70.可优选地从机床的实际加工或运行期间(例如,在机床的实验测试运行期间和/或机床的实际加工过程中)确定神经网络的新训练或输入数据,并且另外或可选地,也可以从计算机实现的机床仿真中确定神经网络的新训练或输入数据,例如在虚拟机床上和/或基于机床的数字孪生确定神经网络的新训练或输入数据。
71.可以结合来自fe分析、机床(虚拟机床或数字孪生)的计算机仿真和/或机床的实验操作的数据,使用神经网络生成更新、调整或优化特征图的新数据。
72.在示例性实施例中,特别优选的是,神经网络不直接影响对机床进行的实际温度补偿方法,由于优选地通过机床的控制装置基于一个或多个特征图对机床执行实际温度补偿方法,可以通过神经网络对特征图进行一次或数次调整或优化,甚至对特征图进行重复调整或优化。
73.优选地,神经网络对基于图像的校正不产生直接影响,但却控制或影响特征图,因此神经网络仅对温度补偿有间接影响。特别优选地,基于一个或多个特征图对机床执行基于图像的校正,通过神经网络调整或优化特征图。
74.在一些示例性实施例中,用于神经网络的更新的输入数据可以记录在机床的安装位置,并可以自动更新特征图。
75.一个优点是抗波动影响。此外,本发明允许显著改进机器或机器操作对新环境条件,例如在新安装地点的适应性。此外,还有一个优点就是可以进一步地减小位移误差,并且可以实现更高的制造精度。
76.一些示例性实施例的基础是提供一个或多个描述机床的温度特性的特征图。这可能包括,例如:选择输入数据或输入变量(例如,温度、轴位置等),定义输入变量的极限值(例如,温度、位置;最大值和/或最小值),离散输入变量(例如,特征地图网格的定义),选择核心或基本函数(“核心函数”),优化传感器,和/或收集数据,等等。
77.在一些示例性实施例中,可基于数据处理过程或仿真(例如,fe或fem仿真或分析)来计算(例如,基于最小二乘法)一个或多个特征图。在一些示例性实施例中,可以基于虚拟机床的数据处理过程或仿真,或者基于机床的数字孪生和/或基于测试操作中的机床的实验测定另外地或可选地计算或确定一个或多个特征图。
78.然后,例如可以通过将特征图传输至机床的控制装置来提供一个或多个经计算或
确定的特征图。
79.为实现通过神经网络对特征图进行调整,可以将特征图或特征图中的条目作为神经网络的输入数据,并将其从机床的控制装置传输到神经网络,并且可以将特征图或特征图的至少一部分读入神经网络。此外,可从机床、机床的传感器和/或机床的的控制装置读取新数据或输入变量。优选地,然后基于神经网络的网络结构更新或调整特征图和/或特征图中的至少一个或多个条目。
80.在一些优选示例性实施例中,神经网络的网络结构基于径向基函数和/或其它插值函数(例如,线性和非线性回归方法)。
81.根据示例性实施例的连续学习补偿算法优选地基于神经网络和/或插值函数(例如,线性和/或非线性回归方法、径向基函数、多项式基函数等)。此外,可以集成遗传算法,用以独立地调整插值函数的插值支撑点。
82.用于调整或优化特征图的神经网络可包括例如通过基于数据库、测量数据和/或仿真数据的数据采集的学习算法(例如,通过基于虚拟机床的仿真或基于机床的数字孪生生成合成输入变量)。
83.本发明的示例性实施例优选地涉及一种特别是借助于神经网络描述基于机床结构的热致位移误差的连续学习补偿算法的,基于图像的方法。
84.该补偿方法的连续扩展特别优选地涉及在机床加工期间和/或在机床的可移动部件或轴的位置设置期间的机床负载情况的描述。
85.在一些优选示例性实施例中,机床的控制装置可以自动识别处理方法,并且可以使用适当的特征图对处理方法进行校正,例如,通过为不同的处理方法分别提供相应的特征图并通过神经网络对这些特征图进行调整或优化。
86.此外,在进一步的示例性实施例中,可以调整或优化传感器布置以改进对控制的反馈。这还允许通过改进的传感器布置进行预测状态的估计。
87.图1示出了根据本发明示例性实施例的用于对机床进行温度补偿的特征图kf的示意性示例图。
88.以示例的方式提供特征图kf,通过这种方式,使得特征图kf包括来自机床的n个温度传感器的多个温度测量值ti和来自机床的位置传感器的多个位置测量值xj,其中,i=1,
…
,n,j=1,
…
,m,该多个温度测量值ti作为输入变量,该位置测量值xj优选地指示机床的m个可移动部件的位置(例如,测量的实际位置),例如指示机床的m个可移动轴的位置。作为替代或除了位置测量值外,还可以使用机床的控制装置的位置目标值或轴目标值。
89.作为输出变量,特征图kf输出,例如校正参数kp,该校正参数kp可被机床的控制装置用作补偿值或用于调整目标位置的校正值,用于校正或补偿机床上的热导致的位置变化。
90.在进一步的示例性实施例中,特征图还可以仅定义来自机床的n个温度传感器的多个温度测量值ti,其中,ti,i=1,
…
,n,该多个温度测量值ti作为输入变量(例如,无位置测量值作为输入变量)。
91.此外,可以使用一个或多个特征图来确定多个校正参数,并且,还可以定义进一步的输入变量。
92.图2示出了根据本发明示例性实施例的用于对机床进行温度补偿的多个特征图
kf1、kf2、kf3,...。
93.以示例的方式提供特征图kf1、kf2、kf3,...,通过这种方式,使得来自机床的n个温度传感器的多个温度测量值ti和来自机床的位置传感器的多个位置测量值xj被合并为输入变量,其中,i=1,
…
,n,j=1,
…
,m。xj优选地指示机床的m个可移动部件的位置(例如,测量的实际位置),例如指示机床的m个可移动轴的位置。
94.除此之外,或者作为替代方案,可以进一步将机床的控制装置的传感器值和/或参数作为输入变量进行读取,这些输入变量比如是机床的可移动部件(例如,机床的线性轴、旋转轴和/或枢轴)的速度的速度值xj。速度值xj优选地表示机床的m个可移动部件的速度(例如,通过测量实际位置的时间相关性),例如表示机床的m个可移动轴的速度。除此之外或作为替代方案,加速度值或加速度测量值也可被合并为输入变量。
95.除此之外,或者作为替代方案,可以进一步将机床的控制装置的传感器值和/或参数读取为输入变量,该输入变量例如是转速值ωk(例如,主轴转速、电机或驱动速度,例如轴驱动的驱动速度,等等)、压力值pq(例如,压力测量值,比如空气压力、机床气动系统中的压力值、机床液压系统中的压力值、机床冷却系统中的压力值),以及例如湿度测量值。
96.特征图kf1、kf2、kf3的每个输出,例如,各个校正参数kp1、kp2或kp3作为输出变量,其可被机床的控制装置用作各自的补偿值或用于调整一个或多个目标位置的各自校正值,用于校正或补偿机床上的热导致的位置变化。这里,校正参数kp1、kp2和kp3分别可以规定可用于机床的各个轴的校正参数,或者规定各个正交方向上的校正参数。具有一个输出变量的特征图kf1、kf2、kf3中的每一个也可被理解为或提供为具有多维输出变量空间的多维特征图,其中可以输出变量向量。
97.图3示出了用于对机床进行温度补偿的基于图像的方法的示意图。
98.在步骤s301中,例如,由机床的的控制装置提供指示或描述机床的温度特性的一个或多个特征图。可能已经在基于fe模型的仿真或分析中生成特征图,并且优选地在机床的控制装置上提供特征图,其作为存储数据结构(例如,作为查找表或查找矩阵)。
99.在步骤s302中,通过示例确定机床的输入数据或输入变量。该输入数据或输入变量优选包括读取自机床的温度传感器的温度测量值。此外,该输入数据或输入变量可能包括读取自与机床的可移动部件(例如,可移动轴)的实际位置相关的位置数据,例如读取自机床的控制装置或机床的位置测量传感器的数据。此外,可读取附加的传感器数据或控制数据(见上文)。
100.在步骤s303中,例如基于输入数据或输入变量并基于所提供的特征图(例如,作为特征图的直接输出变量)和/或从基于特征图的输出变量的进一步计算来确定补偿参数的一个或多个校正参数。
101.在步骤s304中,例如,由机床的控制装置基于所确定的补偿参数的一个或多个校正参数对机床的热引起的位置变化进行温度补偿或校正。
102.可优选地,例如周期性地、准连续地(例如,以由机床的控制装置的时钟频率决定的时钟频率离散地)、有规律地、在预定时间、当检测到温度变化时,重复执行步骤s302至s304以进行重复的温度补偿。
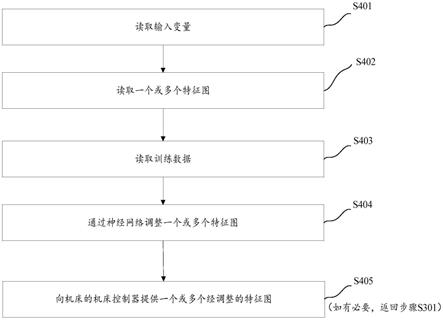
103.图4示出了用于更新特征图的神经网络的应用的示意图,该特征图用于对机床进行温度补偿的基于图像的方法。
104.在步骤s401中,例如通过(例如,从机床的控制装置或通过来自机床的传感器的传感器值的直接传输)读取特征图的输入变量。优选地,读取待更新的特征图的部分或全部输入变量。还可以读取更多的输入变量。可选地或除此之外,也可以从计算机实现的机床仿真(例如,在虚拟机床上或基于机床的数字孪生)生成传感器数据,也即,所谓的合成生成的传感器数据。
105.在步骤s402中,例如,读取特征图或特征图的至少一些条目。为此,读出由机床的控制装置当前提供或存储的特征图或特征图的至少一部分。
106.在步骤s403中,举例来说,可选地读取附加的训练数据。用于训练神经网络的这类训练数据可包括,例如实际测量的位置数据,例如,当在训练步骤中使用附加的夹持的位置测量装置而不是工具(例如,通过测量探头)对机床执行温度补偿时实际测量的位置数据和/或使用附加的位置测量装置(例如,使用激光测量、相机测量等)实际测量的位置数据,旨在将实际位置和目标位置与机床的控制装置的附加的位置测量值进行比较。
107.可选地或除此之外,也可以从计算机实现的机床仿真(例如,在虚拟机床上或基于机床的数字孪生)生成训练数据,或者可以从数据库中检索训练数据,该数据库从多个机床收集历史处理数据。
108.此外,训练数据还可以包括从控制数据读取的数据。
109.在步骤s404中,神经网络(例如,在训练操作之后或训练运行期间的神经网络),也即,例如训练中或已训练的神经网络,被用于至少部分地调整或更新已基于输入数据读取的特征图或提供的特征图,以及可能基于可选的可用训练数据的特征图。
110.在步骤s405中,向机床的控制装置提供经调整或更新的特征图或经调整或更新的特征图的条目。因此,对于根据图3的温度补偿,可以向机床的控制装置提供经调整或更新的特征图或多个经调整或更新的特征图(例如,图3中的步骤s301,或者在图3中的步骤s302至s304的重复执行期间)。
111.图5示意性地示出了例如根据本发明示例性实施例的用于调整一个或多个机床的一个或多个特征图的系统。
112.该系统包括例如具有处理器101的服务器100和存储设备102,在存储设备102上实现或存储可被处理器101执行的神经网络nn。
113.例如,服务器100经由通信网络200(例如,局域网、无线局域网、甚至因特网)连接到机床400的控制装置300。例如,机床400优选包括致动器401(例如,主轴驱动、轮轴驱动等)和传感器402(例如,温度传感器、位置测量传感器、压力传感器、湿度传感器、加速度传感器、振动传感器和/或力传感器等)。
114.控制装置300例如包括处理器301和存储设备302,存储设备302提供或存储有一个或多个特征图kf。处理器301被优选配置为基于特征图kf(例如,根据上述的一个或多个方面及示例)执行温度补偿。
115.例如,服务器100的处理器101被配置为使用神经网络nn来调整或更新控制装置300的特征图kf(例如,根据上述的一个或多个方面及示例)。
116.此外,进一步的控制装置300'和300”及相应的机床400'和400”连接到服务器100,以便能够使用神经网络nn来例如调整或更新多个机床(例如,在不同的安装位置且具有相同设计的机床)的特征图。
117.上文已参考附图详细描述了本发明的示例或示例性实施例及其优点。应再次注意,本发明并不以任何方式受限制或局限于上述示例性实施例及其实现特征,而是进一步包括对示例性实施例作出的修改,尤其是那些通过修改所述示例的特征或通过组合所述示例的单个或多个特征而包括在独立权利要求保护范围内的特征。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。