1.本发明属于液压技术领域,具体涉及一种快速增压液压缸活塞杆差动回退的液压系统及控制方法。
背景技术:
2.申请人的先前申请的专利号zl201420551432.7的现有新型快速增压液压缸的液压系统为双泵供油的快速运动回路,此种液压回路有一个高压油泵、一个低压油泵在新型快速增压液压缸活塞杆的快速前进时两个油泵同时做功,当活塞杆工进时只有高压油泵做功以达到节能的目的,当两个油泵同时向前腔供油时活塞杆回退。此种液压系统能使活塞杆快速前进而回退未有明显加速;在电机功率和油泵排量不变或降低的情况下,设计一种使活塞杆回退速度加快增加液压缸的工作效率且更加的节能的液压系统是很一项技术革新。
技术实现要素:
3.本发明目的是针对上述存在的问题和不足,提供一种快速增压液压缸活塞杆差动回退的液压系统及控制方法,其能够实现液压缸活塞杆的快速前进和差动回退,提高作业效率,并且能够节省能耗,优化液压缸的各个不同阶段的控制回路,提高实用性。
4.为实现上述目的,所采取的技术方案是:一种快速增压液压缸活塞杆差动回退的液压系统,用于快速增压液压缸的动作驱动,所述快速增压液压缸包括:缸体,所述缸体的前端设置有前封头,缸体的后端设置有后封头;第一活塞杆,所述第一活塞杆设置在所述缸体内,所述第一活塞杆的前端设置有第一活塞,所述第一活塞杆的后端与后封头固定连接,在所述第一活塞杆中部设置有中心流道,所述后封头上设置有与所述中心流道连通的第一油口;以及第二活塞杆,所述第二活塞杆匹配套设在所述缸体与第一活塞杆之间,所述第二活塞杆的后端设置有第二活塞,所述第二活塞的内壁和外壁分别与所述第一活塞杆和缸体内腔滑动密封配合,所述第二活塞杆的前端外壁与所述前封头匹配滑动密封配合;所述第二活塞杆的前端内壁与所述第一活塞匹配滑动密封配合;位于所述第一活塞前部的所述第二活塞杆内腔为第一腔体,位于第一活塞杆外壁与第二活塞杆内壁之间的腔体为第二腔体,位于第二活塞杆外壁与缸体内壁之间的腔体为第三腔体,位于所述第二活塞后部的腔体为第四腔体,所述第二活塞杆后端设置有连通孔,所述第二腔体和第三腔体通过所述连通孔连通,所述后封头或缸体后部设置有与所述第四腔体连通的充液油口,所述缸体前端侧壁上开设有与第三腔体连通的第二油口,且所述第二腔体和第三腔体的有效作用面积之和大于所述第一腔体的有效作用面积;所述快速增压液压缸活塞杆差动回退的液压系统包括:油箱;
驱动泵,所述驱动泵包括高压泵和低压泵;主油管路,所述高压泵的出液口和低压泵的出液口分别通过第一单向阀和第二单向阀与所述主油管路连通;第一方向控制阀,所述第一油口通过第一分支管路和第一方向控制阀与所述主油管路连通;第二方向控制阀,所述第二油口通过第二分支管路和第二方向控制阀与所述主油管路连通;第三方向控制阀,所述充液油口通过第三分支管路和第三方向控制阀与所述主油管路连通;第四方向控制阀,所述第二油口通过第四方向控制阀与油箱连通;充液阀,所述充液油口通过第四分支管路和充液阀与油箱连通;卸荷阀,所述第一油口通过卸荷阀与油箱连接;以及控制单元,所述控制单元控制所述高压泵、低压泵和各控制阀动作;所述低压泵出液口与油箱之间设置有第一溢流阀,在所述主油管路上设置有压力传感器,所述控制单元接收所述压力传感器的信号,并控制所述第一溢流阀动作。
5.根据本发明快速增压液压缸活塞杆差动回退的液压系统,优选地,所述驱动泵为双联油泵。
6.根据本发明快速增压液压缸活塞杆差动回退的液压系统,优选地,所述快速增压液压缸活塞杆差动回退的液压系统还包括阀块,各控制阀集成布设在所述阀块上。
7.根据本发明快速增压液压缸活塞杆差动回退的液压系统,优选地,所述充液油口经第三分支管路、第三方向控制阀和第一方向控制阀后与所述主油管路连通。
8.根据本发明快速增压液压缸活塞杆差动回退的液压系统,优选地,所述高压泵出液口与油箱之间设置有第二溢流阀,所述主油管路上还设置有压力表。
9.一种快速增压液压缸控制方法,利用上述的快速增压液压缸活塞杆差动回退的液压系统进行快速增压液压缸的驱动动作,所述快速增压液压缸的动作控制回路具体包括快速前进控制回路、慢速前进控制回路、前进做功控制回路和快速后退差动控制回路;所述快速前进控制回路具体包括以下步骤:第一方向控制阀、第四方向阀和充液阀打开,第二方向控制阀、第三方向控制阀和卸荷阀闭合,液压油经驱动泵、主油管路和第一方向控制阀、第一油口进入第一腔体,第四腔体通过充液阀进油,第二腔体和第三腔体中的液压油经第四方向控制阀回流至油箱,由此实现快速增压液压缸的活塞杆快速前进动作;所述慢速前进控制回路具体包括以下步骤:第一方向控制阀、第三方向控制阀和第四方向控制阀打开,第二方向控制阀、充液阀和卸荷阀关闭,此时液压油经驱动泵和主油管路后,通过第一方向控制阀和第三方向控制阀分别进入第一腔体和第四腔体,第二腔体和第三腔体中的液压油经第四方向控制阀回流至油箱,由此实现快速增压液压缸的活塞杆慢速前进动作;所述前进做功控制回路具体包括以下步骤:随着所述慢速前进控制回路的持续动作,活塞杆的不断伸出且活塞杆承受的压力逐渐增大,当主油管路内的压力超过第一溢流阀的设定压力时,压力传感器发出信号,低压泵卸荷,高压泵做功,直至设定压力;
所述快速后退差动控制回路具体包括以下步骤:当快速增压液压缸需要进行回退动作时,第一方向控制阀、第二方向控制阀和充液阀打开,第三方向控制阀、第四方向控制阀和卸荷阀关闭,第一腔体、第二腔体和第三腔体均同主油管路连通,在相同的压力下,所述第二腔体和第三腔体的有效作用面积之和大于所述第一腔体的有效作用面积,第一腔体中的液压油流向第二腔体和第三腔体,形成活塞杆后退时的差动状态,第四腔体的液压油经充液阀回流至油箱。
10.根据本发明快速增压液压缸控制方法,优选地,还包括保压卸荷控制回路,所述保压卸荷控制回路具体包括以下步骤:在活塞杆停止动作时,对第一方向控制阀、第二方向控制阀、第三方向控制和第四方向控制关闭,系统处于保压状态;保压结束后,卸荷阀打开。
11.采用上述技术方案,所取得的有益效果是:本技术能够实现液压缸活塞杆的快速前进和差动回退,提高作业效率,并且能够节省能耗,优化液压缸的各个不同阶段的控制回路,提高实用性。本技术通过多个方向控制阀的布置,从而合理区分控制回路,优化油液路线,并根据第二腔体和第三腔体在进行工作时的有效作用面积大于第一腔体在进行工作时的有效作用面积,实现差动回退状态。本技术能够根据液压缸在动作过程中的不同阶段进行行进速度调控,根据不同阶段对于前进速度和活塞杆承载压力的不同,通过快速前进控制回路、慢速前进控制回路、前进做功控制回路和快速后退差动控制回路实现一个周期的动作,其中根据保压时间还设置保压卸荷控制回路,以便于降低能耗,优化产品的性能,此外本技术根据活塞杆承受的压力进行驱动泵的选择,减少能耗,优化低压泵和高压泵的配合,避免超出设定载荷,实现整体结构的稳定性,提高安全性和实用性。
附图说明
12.为了更清楚地说明本发明实施例的技术方案,下文中将对本发明实施例的附图进行简单介绍。其中,附图仅仅用于展示本发明的一些实施例,而非将本发明的全部实施例限制于此。
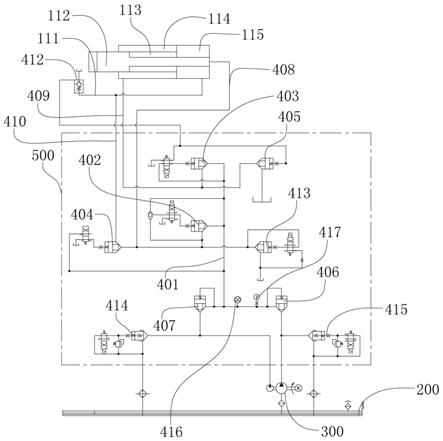
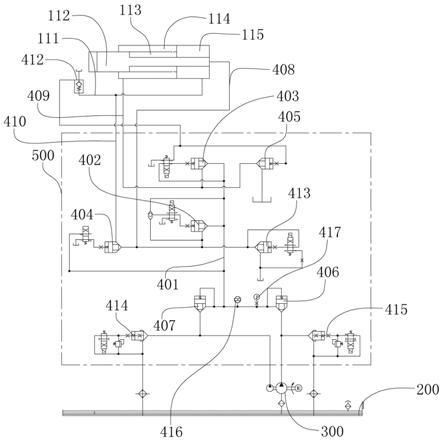
13.图1为根据本发明实施例的快速增压液压缸活塞杆差动回退的液压系统图。
14.图2为根据本发明实施例的快速增压液压缸不同动作阶段的控制阀开启闭合图表。
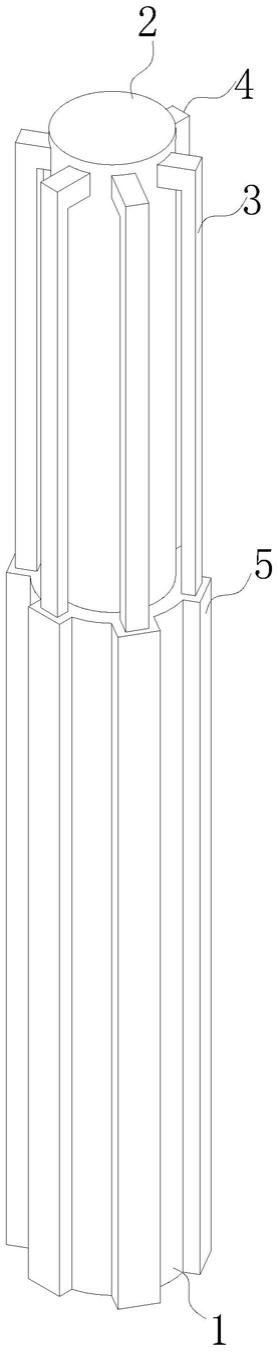
15.图3为根据本发明实施例的快速增压液压缸的结构示意图之一,其示出了处于收缩状态下的快速增压液压缸的结构示意图。
16.图4为根据本发明实施例的快速增压液压缸的结构示意图之二,其示出了处于快速伸出状态下的快速增压液压缸的结构示意图。
17.图5为根据本发明实施例的快速增压液压缸的结构示意图之三,其示出了处于慢速伸出状态下的快速增压液压缸的结构示意图。
18.图6为根据本发明实施例的快速增压液压缸的结构示意图之四,其示出了处于前进做功状态下的快速增压液压缸的结构示意图。
19.图7为根据本发明实施例的快速增压液压缸的结构示意图之五,其示出了处于差动回退状态下的快速增压液压缸的结构示意图。
20.图中序号:
100为快速增压液压缸、101为缸体、102为第一活塞杆、103为第二活塞杆、104为前封头、105为后封头、106为中心流道、107为第一油口、108为第一活塞、109为第二活塞、110为第二油口、111为充液油口、112为第一腔体、113为第二腔体、114为第三腔体、115为第四腔体、116为连通孔;200为油箱;300为驱动泵;401为主油管路、402为第一方向控制阀、403为第二方向控制阀、404为第三方向控制阀、405为第四方向控制阀、406为第一单向阀、407为第二单向阀、408为第一分支管路、409为第二分支管路、410为第三分支管路、411为第四分支管路、412为充液阀、413为卸荷阀、414为第一溢流阀、415为第二溢流阀、416为压力表、417为压力传感器;500为阀块;600为物料。
具体实施方式
21.下文中将结合本发明具体实施例的附图,对本发明实施例的示例方案进行清楚、完整地描述。除非另作定义,本发明使用的技术术语或者科学术语应当为所属领域内具有一般技能的人士所理解的通常意义。
22.在本发明的描述中,需要理解的是,“第一”、“第二”的表述用来描述本发明的各个元件,并不表示任何顺序、数量或者重要性的限制,而只是用来将一个部件和另一个部件区分开。
23.应注意到,当一个元件与另一元件存在“连接”、“耦合”或者“相连”的表述时,可以意味着其直接连接、耦合或相连,但应当理解的是,二者之间可能存在中间元件;即涵盖了直接连接和间接连接的位置关系。
24.应当注意到,使用“一个”或者“一”等类似词语也不必然表示数量限制。“包括”或者“包含”等类似的词语意指出现该词前面的元件或物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
25.应注意到,“上”、“下”、“左”、“右”等指示方位或位置关系的术语,仅用于表示相对位置关系,其是为了便于描述本发明,而不是所指装置或元件必须具有特定的方位、以特定的方位构造和操作;当被描述对象的绝对位置改变后,则该相对位置关系也可能相应的改变。
26.参见图1
‑
图7,本技术公开了一种快速增压液压缸活塞杆差动回退的液压系统,用于快速增压液压缸100的动作驱动,本技术的快速增压液压缸与申请人在先申请的专利号zl201420551432.7的现有新型快速增压液压缸专利中的结构基本相同,但仍存在不同点,对于本技术所公开的快速增压液压缸的具体结构进行进一步详细的说明。
27.具体地,本技术中快速增压液压缸100包括缸体101、第一活塞杆102和第二活塞杆103,在缸体的前端设置有前封头104,缸体的后端设置有后封头105;第一活塞杆102设置在所述缸体101内,所述第一活塞杆102的前端设置有第一活塞108,所述第一活塞杆102的后端与后封头105固定连接,在所述第一活塞杆102中部设置有中心流道106,所述后封头105上设置有与所述中心流道106连通的第一油口107;所述第二活塞杆103匹配套设在所述缸
体101与第一活塞杆102之间,所述第二活塞杆103的后端设置有第二活塞109,所述第二活塞109的内壁和外壁分别与所述第一活塞杆108的外壁和缸体101的内腔滑动密封配合,所述第二活塞杆109的前端外壁与所述前封头104匹配滑动密封配合;所述第二活塞杆103的前端内壁与所述第一活塞108匹配滑动密封配合;位于所述第一活塞108前部的所述第二活塞杆103内腔为第一腔体112,位于第一活塞杆102外壁与第二活塞杆103内壁之间的腔体为第二腔体113,位于第二活塞杆103外壁与缸体101内壁之间的腔体为第三腔体114,位于所述第二活塞109后部的腔体为第四腔体115,所述第二活塞杆103后端设置有连通孔116,所述第二腔体113和第三腔体114通过所述连通孔116连通,所述后封头105或缸体101后部设置有与所述第四腔体115连通的充液油口111,所述缸体101前端侧壁上开设有与第三腔体114连通的第二油口110,且所述第二腔体113和第三腔体114的有效作用面积之和大于所述第一腔体112的有效作用面积,有效作用面积的改变能够以便于在回退时形成差动状态,进而提高快速增压液压缸的动作效率。
28.在上述结构的基础上,对液压控制系统进行进一步的优化,使得各个不同阶段的控制回路得以稳定、高效进行,具体地,本技术的快速增压液压缸活塞杆差动回退的液压系统包括油箱200、驱动泵300、主油管路401、第一方向控制阀402、第二方向控制阀403、第三方向控制阀404、第四方向控制阀405、充液阀412、卸荷阀413和控制单元,所述驱动泵300包括高压泵和低压泵;所述高压泵的出液口和低压泵的出液口分别通过第一单向阀406和第二单向阀407与所述主油管路401连通;所述第一油口107通过第一分支管路408和第一方向控制阀402与所述主油管路401连通;所述第二油口110通过第二分支管路409和第二方向控制阀403与所述主油管路401连通;所述充液油口111通过第三分支管路410和第三方向控制阀404与所述主油管路401连通;所述第二油口110通过第四方向控制阀405与油箱200连通;所述充液油口111通过第四分支管路411和充液阀412与油箱200连通;所述第一油口107通过卸荷阀413与油箱200连接;所述控制单元控制所述高压泵、低压泵和各控制阀动作;所述低压泵出液口与油箱之间设置有第一溢流阀414,在所述主油管路401上设置有压力传感器417,所述控制单元接收所述压力传感器417的信号,并控制所述第一溢流阀414动作。
29.进一步地,本技术中的驱动泵300为双联油泵,其包含有一高压、一低压,通过电机驱动动作。
30.快速增压液压缸活塞杆差动回退的液压系统还包括阀块500,各控制阀集成布设在所述阀块500上,从而形成一个整体的阀体总成。为了便于各个阀在阀体中的布置,也便于各管路在阀体中的布置,尽可能多的共用部分管路。
31.进一步地,充液油口经第三分支管路410、第三方向控制阀404和第一方向控制阀402后与所述主油管路401连通。即将第三分支管路和第三方向控制阀连接在第一方向控制阀的后端的出油端口处,由此当第三方向控制阀导通时,还需要第一方向控制阀的导通才能与主油管路连通。
32.进一步地,本技术的高压泵出液口与油箱200之间设置有第二溢流阀415,能够起到保护作用,当主油管路油液压力过大时,通过溢流卸荷,所述主油管路401上还设置有压力表416,更便于直观的进行观察主油管路中的压力。
33.本技术还公开了一种快速增压液压缸活塞杆差动回退的控制方法,利用上述的快速增压液压缸活塞杆差动回退的液压系统进行快速增压液压缸的驱动动作,所述快速增压
液压缸的动作控制回路具体包括快速前进控制回路、慢速前进控制回路、前进做功控制回路和快速后退差动控制回路。
34.其中,快速前进控制回路具体包括以下步骤:第一方向控制阀402、第四方向阀405和充液阀412打开,第二方向控制阀403、第三方向控制阀404和卸荷阀413闭合,液压油经驱动泵300进入主油管路401,在经过第一方向控制阀402、第一油口107进入第一腔体112,第四腔体115通过充液阀412直接从油箱中进油,第二腔体113和第三腔体114中的液压油经第四方向控制阀405回流至油箱200,由此实现快速增压液压缸100的活塞杆快速前进动作。
35.本技术中的慢速前进控制回路具体包括以下步骤:第一方向控制阀402、第三方向控制阀404和第四方向控制阀405打开,第二方向控制阀403、充液阀412和卸荷阀413关闭,此时液压油经驱动泵300进入主油管路401后,在通过第一方向控制阀402和第三方向控制阀404分别进入第一腔体112和第四腔体115中,第二腔体113和第三腔体114中的液压油经第四方向控制阀405回流至油箱200,由此实现快速增压液压缸100的活塞杆慢速前进动作。
36.本技术中的前进做功控制回路具体包括以下步骤:随着慢速前进控制回路的持续动作,活塞杆的不断伸出且活塞杆承受的压力逐渐增大,当主油管路401内的压力超过第一溢流阀414的设定压力时,压力传感器417发出信号,第一溢流阀得电,低压泵本体的出油口的液压油经溢流阀回流至油箱,由于低压泵和高压泵是双联泵,同轴驱动,因此此时低压泵为是空转状态,低压泵卸荷,高压泵继续做功,直至设定压力。
37.当做功完成后,活塞杆需要回退至初始状态,本技术中的快速后退差动控制回路具体包括以下步骤:当快速增压液压缸需要进行回退动作时,第一方向控制阀402、第二方向控制阀403和充液阀412打开,第三方向控制阀404、第四方向控制阀405和卸荷阀413关闭,第一腔体112、第二腔体113和第三腔体114均同主油管路401连通,在相同的压力下,所述第二腔体113和第三腔体114的有效作用面积之和大于所述第一腔体112的有效作用面积,第一腔体112中的液压油流向第二腔体113和第三腔体114,形成活塞杆后退时的差动状态,第四腔体115的液压油经充液阀412回流至油箱200。
38.进一步地,在活塞杆伸出至设定位置,需要持续保压一段时间,因此本技术还包括保压卸荷控制回路,保压卸荷控制回路具体包括以下步骤:在活塞杆停止动作时,对第一方向控制阀402、第二方向控制阀403、第三方向控制404和第四方向控制405关闭,系统处于保压状态;保压结束后,卸荷阀413打开。在正常工作情况下,保压卸荷控制回路工作是在前进做功控制回路和快速后退差动控制回路之间实施的动作工序。
39.以上五个工序使得整个快速增压液压缸的动作实现一个周期的循环动作,可以进行下一个周期循环动作的开始,如图3
‑
图7所示,示出了相应的工序中的结构图。
40.进一步地,针对不同的阀体进行进一步的说明,上述结构中,第一溢流阀414和第二溢流阀415均为电磁插装溢流阀,第一单向阀406和第二单向阀407为插装单向阀,卸荷阀413为电磁插装卸荷阀,第一方向控制阀402、第二方向控制阀403和第三方向控制阀404为电磁插装方向控制阀,第四方向控制阀405为插装方向控制阀。
41.在不同的阶段,电磁控制阀的动作方式具体如图2所示,此时第三方向控制阀需要经过第一方向控制阀后接入主流管路,且第三方向控制404此时是得电闭合断电导通,而第一溢流阀414、第二溢流阀415、第一方向控制阀402、第二方向控制阀403和卸荷阀413均为得电导通断电闭合,据此电磁控制阀得电和启闭情况进行整个动作过程的进一步说明:
快速前进控制回路中,第一溢流阀414、第二溢流阀415、第一方向控制阀402和第三方向控制阀404得电,第一溢流阀414和第二溢流阀415起压,第一方向控制阀402打开,第三方向控制阀404闭合,第四方向控制阀405打开,充液阀412打开,第二方向控制阀403和卸荷阀413未得电,处于闭合状态。
42.慢速前进控制回路中,第一溢流阀414、第二溢流阀415、第一方向控制阀402得电,第一溢流阀414和第二溢流阀415起压,第一方向控制阀402、第三方向控制阀404和第四方向控制阀405打开,第二方向控制阀403、充液阀412和卸荷阀413关闭。
43.前进做功控制回路中,其在慢速前进控制回路的基础上,第一溢流阀414处于泄压状态,从而使得低压泵空转。
44.保压卸荷控制回路中,各阀体均处于闭合状态实现保压,当需要泄压时,卸荷阀得电,泄压。
45.快速后退差动控制回路中,各电磁控制的阀体均得电,仅卸荷阀为断电状态。
46.上文已详细描述了用于实现本发明的较佳实施例,但应理解,这些实施例的作用仅在于举例,而不在于以任何方式限制本发明的范围、适用或构造。本发明的保护范围由所附权利要求及其等同方式限定。所属领域的普通技术人员可以在本发明的教导下对前述各实施例作出诸多改变,这些改变均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。