1.本发明属于大型货运机着陆轨迹控制技术领域,特别涉及一种大型货运无人机着陆轨迹控制方法。
背景技术:
2.大型货运无人机着陆阶段,随着减速和地面高度的下降,其轨迹控制是关系到飞机安全的重要因素之一,现有的着陆轨迹控制方法,由于其轨迹精度有限,对于大型货运飞机,特别是大型货运无人机等载货前后重量差异大,对着陆轨迹要求高,现有的轨迹控制方法往往不能满足其实际安全需要,针对上述问题,本发明提供了一种新的着陆轨迹控制方法,实现轨迹精度更高,能有效提高大型货运无人机着陆的安全性。
技术实现要素:
3.本发明的目的在于提供一种大型货运无人机着陆轨迹控制方法,实现轨迹精度更高,能有效提高大型货运无人机着陆的安全性。
4.为实现上述目的,本发明采用以下技术方案:
5.一种大型货运无人机着陆轨迹控制方法,其特征在于,所述方法包括以下步骤:
6.s1)预设计大型货运无人机着陆轨迹的三个阶段:深下滑段、拉起段和浅下滑段;
7.s2)确定主要轨迹参数及几何关系,主要轨迹参数包括深下滑角、浅下滑角、拉起段纵向高度、深下滑段结束点坐标,深下滑段、拉起段和浅下滑段对应轨迹的几何关系参考高度剖面为:
8.深下滑段,h
s
=tanγ1(x
‑
x0),γ1为深下滑角,x0为深下滑段与地面航道的交点,拉起段,x
e
为拉起段起始点位置,h
d
为拉起段高度差,σ为拉起段衰减率,浅下滑段,h
q
=tanγ2(x
‑
x
d
),γ2为浅下滑角,x
d
是触地点坐标;
9.s3)参数确定,深下滑角确定,深下滑段倾角变化率为0,可得参考升力系数确定深下滑角γ1,浅下滑角的选择,要避免下降过快导致超出荷载限制;
10.s4)建立大型货运无人机空气动力学模型,升力系数、阻力系数气动力方程为:
[0011][0012]
c
l
为升力系数,c
d
为阻力系数,δ为襟翼偏角;
[0013]
s5)结合大型货运无人机的运动学与动力学方程,确认大型货运无人机运动状态,根据大型货运无人机运动状态设定着陆轨迹;
[0014]
s6)着陆轨迹优化,对于设定的着陆轨迹,通过设计纵向着陆控制方程,求解有界解,利用反馈输出,产生状态轨迹,实现对着陆轨迹优化;
[0015]
s7)着陆轨迹检测确认,通过高速摄像获取序列图像,获取特征位点坐标,并对特征位点进行初步定位,并通过图像像素灰度值设置,对图像进行预处理,设定阈值,进行边缘检测,采用hough变换进一步定位,并计算特征位点的变化量,计算出大型货运无人机的运动参数,进一步解算得到大型货运无人机的实际运动轨迹各项参数,对实际着落轨迹实现确认。
[0016]
进一步地,s1)所述深下滑段为一段类直线轨迹,所述类直线轨迹起始于平飞阶段结束点,所述类直线段结束于所述拉起段开始点,所述拉起段,通过调整襟翼构型,调整大型货运无人机纵向姿态,大型货运无人机由低头改为抬头状态,并进入所述浅下滑段,所述浅下滑段起始于拉起段结束点,结束于大型货运无人机触地点。
[0017]
进一步地,s2)所述深下滑角为所述深下滑段轨迹延长线与水平航道之间的夹角,所述浅下滑角为浅下滑段轨迹与水平航道之间的夹角,所述拉起段纵向高度为大型货运无人机拉起段轨迹在竖直平面上投影距离。
[0018]
进一步地,s5)所述的动力方程为:
[0019][0019]
m,v分别表示大型货运无人机的质量与速度,γ表示航迹倾角,h表示高度,x表示航道方向水平位置,d、l分别表示受到的阻力与升力。
[0020]
进一步地,s6)所述纵向着陆控制方程为:
[0021]
y
d
(t)=cx
d
(t),y
d
(t)为优化输出轨迹。
[0022]
进一步地,s6)所述求解有界解的过程,对于大型货运无人机着陆轨迹,其高度和地速的输出方程,定义确定内部动态函数ε(t)=[q,θ]
t
,求解转换矩阵,对于中的变量,求得其原状态变量的线性转换关系,得到转换矩阵t,进而通过新旧坐标转换,求出有界解ε
d
(t),得到内部动态方程,进而得到优化的状态轨迹。
[0023]
进一步地,所述优化的状态轨迹为:
[0024][0025]
进一步地,s7)所述解算,其方法为利用摄像机数据,结合大型货运无人机着陆参数数学模型,获取每帧图片上特征点的空间坐标的精确解,然后将特征点的空间坐标转换到大型货运无人机跑道坐标系下,获得跑道坐标系下高精度的坐标信息,根据不同特征点的坐标信息,输出轨迹曲线。
[0026]
本发明具有以下有益效果:
[0027]
本发明通过对大型货运无人机着陆轨迹的预设计、参数确认、轨迹优化及检测确认,使得设计的着陆轨迹与实际着陆轨迹之间一致性更高,着陆轨迹的实际应用操作性更强,能有效的提高大型货运无人机着陆的安全性;建立货运无人机空气动力学模型,构建升力系数、阻力系数气动力方程时将襟翼偏角纳入模型之中,使得襟翼对大型货运无人机着陆轨迹的调控作用与实际影响效果更为接近,更有利于着陆轨迹设计的准确性;轨迹优化
过程通过设计纵向着陆控制方程,求解有界解,利用反馈输出,产生状态轨迹,实现对着陆轨迹优化,该优化方法对于同类轨迹设计和控制也具有一定的启示意义;轨迹检测确认过程,对实际着陆轨迹进行跟踪计算,并与设计轨迹进行对比,进一步验证了设计轨迹的可行性和有效性,可极大的提高大型货运无人机着陆的安全性。
附图说明
[0028]
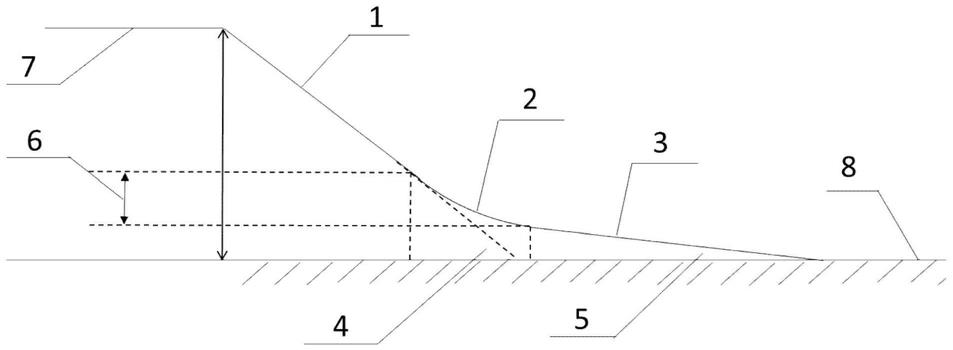
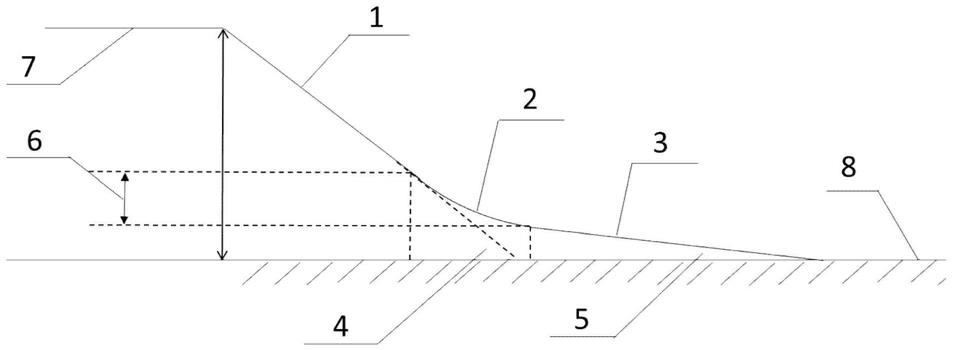
图1:一种大型货运无人机着陆轨迹示意图;
[0029]
图中各标号为:深下滑段
‑
1,拉起段
‑
2,浅下滑段
‑
3,深下滑角
‑
4,浅下滑角
‑
5,拉起段纵向高度
‑
6,进场平飞段
‑
7,触地滑跑段
‑
8。
具体实施方式
[0030]
下面结合附图和实施例对本专利的技术方案作进一步说明。
[0031]
实施例1
[0032]
如图所示,设计大型货运无人机着陆轨迹的三个阶段:深下滑段1、拉起段2和浅下滑段3;
[0033]
主要轨迹参数包括深下滑角4、浅下滑角5、拉起段纵向高度6、深下滑段结束点坐标,深下滑段1、拉起段2和浅下滑段3对应轨迹的几何关系,深下滑段,h
s
=tan γ1(x
‑
x0),γ1为深下滑角,x0为深下滑段与地面航道的交点,x为所在位点对应地面位置,拉起段,x
e
为拉起段起始点位置,h
d
为拉起段高度差,σ为拉起段衰减率,浅下滑段,h
q
=tan γ2(x
‑
x
d
),γ2为浅下滑角,x
d
是触地点坐标,x为所在位点对应地面位置;
[0034]
深下滑段1为一段类直线轨迹,所述类直线轨迹起始于进场平飞段7结束点,所述类直线段结束于所述拉起段2开始点,所述拉起段2,通过调整襟翼构型,调整大型货运无人机纵向姿态,无人机由低头改为抬头状态,并进入所述浅下滑段3,所述浅下滑段3起始于拉起段2结束点,结束于大型货运无人机触地点。所述深下滑角4为所述深下滑段1轨迹延长线与水平航道之间的夹角,所述浅下滑角5为浅下滑段3轨迹与水平航道之间的夹角,所述拉起段纵向高度6为大型货运无人机拉起段轨迹在竖直平面上投影距离。
[0035]
实施例2
[0036]
参数确定,深下滑角确定,大型货运无人机深下滑段倾角变化率为0,可得参考升力系数mg为所受重力,q为动压,s表示飞机机翼的参考面积,从而确定深下滑角γ1,其他参数γ2(浅下滑角),浅下滑角的选择,要避免下降过快导致超出荷载限制,拉起段纵向高度选择需要保证拉起段有一个比较合适的下降速率,触地点坐标是随着跑道实际长度进行调整和变化;
[0037]
建立大型货运无人机空气动力学模型,升力系数、阻力系数气动力方程为:
[0038][0039]
q为动压,ρ为空气密度,x为空气流速,
c
l
、为升力系数,c
d
、、为阻力系数,δ为襟翼偏角,π为常熟,ar为展弦比,e为梯形比。
[0040]
结合大型货运无人机的运动学与动力学方程,结合大型货运无人机的运动学与动力学方程,其中m、v表示质量与速度,γ表示航迹倾角,h表示高度,x表示沿着跑道方向的位置,s表示飞机机翼的参考面积,q表示动压,确认大型货运无人机运动状态,根据大型货运无人机运动状态设定着陆轨迹。
[0041]
实施例3
[0042]
着陆轨迹优化,对于设定的着陆轨迹,通过设计纵向着陆控制方程,求解有界解,利用反馈输出,产生状态轨迹,实现对着陆轨迹优化;
[0043]
纵向着陆控制方程为:
[0044]
y
d
(t)=cx
d
(t),x
d
(t)为状态变量,u
d
(t)为输入变量,a、b为常数,y
d
(t)为优化输出轨迹。t
→
∞时,x(t)
→
x
d
(t),y(t)
→
y
d
(t),实现对输出的精确跟踪,寻找系统内部的有界解;
[0045]
对于飞机着陆轨迹,高度h和地速vg
[0046]
输出方程:
[0047][0048]
定义:y
i
(t)表示i维输出量,从状态变量确定内部动态函数为:
[0049]
ε(t)=[q,θ]
t
,q为俯仰角速率,θ为俯仰角,求解转换矩阵t。
[0050]
对于中的变量,求得其原状态变量x(t)的线性转换关系,得到转换矩阵t。
[0051]
在新坐标系中表示x(t)和u(t),求y
i
(t)的新旧坐标系转换,x(t)为:
[0052][0053]
求出有界解ε
d
(t),
[0054]
结合:
[0055][0056][0057]
和
[0058][0059]
x(t)表示为:
[0060]
[0061]
可得:
[0062][0063]
得到内部动态方程,进而可得期望的状态轨迹:
[0064]
实现优化着陆轨迹设计。
[0065]
实施例4
[0066]
着陆轨迹检测确认,通过高速摄像获取序列图像,获取特征位点坐标,并对特征位点进行初步定位,并通过图像像素灰度值设置,对图像进行预处理,设定阈值,进行边缘检测,采用hough变换进一步定位,并计算特征位点的变化量,计算出大型货运无人机的运动参数,进一步解算得到飞机的实际运动轨迹各项参数,对实际着落轨迹实现确认。
[0067]
所述解算,其方法为利用摄像机数据,结合大型货运无人机着陆参数数学模型,获取每帧图片上特征点的空间坐标的精确解,然后将特征点的空间坐标转换到大型货运无人机跑道坐标系下,获得跑道坐标系下高精度的坐标信息,根据不同特征点的坐标信息,输出轨迹曲线。
[0068]
根据设在飞机上特征位点的机体坐标(x
a
,y
a
,z
a
),通过旋转及平移等变换,获得在跑道坐标系中坐标(x
b
,y
b
,z
b
)。
[0069]
根据转换矩阵r及平移参数(x
j
,y
j
,z
j
),可计算出飞机的运动轨迹。
[0070]
摄像机在物方空间的六个外方位元素通过光束法平差算法求得,根据角元素组成的旋转矩阵,算出特征点在机体坐标系的空间坐标,得到飞机着陆轨迹数据,进而得到飞机的实际运动轨迹。通过轨迹确认,可进一步确保了大型货运无人机着陆轨迹的设计的安全性和可靠性,为更多可能着陆轨迹的设计提供了一种验证和优化的方法。轨迹检测确认结果显示,本发明设计的着陆轨迹与实际着陆轨迹高度一致,实际深下滑角及浅下滑角与设计着陆角度偏差<0.2
°
,在触地时的高度误差在0.3m以下,实现了轨迹设计基本无偏差,本发明公开的轨迹控制方法极大的提高了大型货运无人机着陆轨迹设计的有效性,对大型货运无人机着陆的安全性有着重要意义。
[0071]
以上实施例对本发明所公开的一种大型货运无人机着陆轨迹控制方法,进行了进一步阐述和说明,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。