采用旋转矩阵表示刀尖点路径中相邻两线段之间的空间位置关系,建立刀尖点空间位置 路径转接光顺模型;设光顺后的刀尖点空间位置路径由插入的光顺曲线和余留位置路径 组成,使在参数插补过程中,刀轴位移方向通过曲线参数跟随刀尖点位置运动,利用五 次b样条曲线对余留位置曲线进行余留直线段或余留圆弧段的重新参数化。
8.进一步地,包括如下步骤:
9.步骤1,建立刀尖点路径g2转接光顺模型;分别对直线段转接光顺控制点及圆弧段 转接光顺控制点进行求解以及误差的解析控制;
10.步骤2,设置刀尖点空间位置路径转接光顺误差,分别进行空间直线段与直线段转接 光顺、空间直线段与圆弧段转接光顺、空间圆弧段与圆弧段转接光顺;
11.步骤3,将刀轴方向路径定义在单位球表面上,将转接段圆心角定义成特征参数,依 照空间圆弧段与圆弧段转接光顺方法,进行刀轴方向路径转接误差与特征参数的求解;
12.步骤4,给定一系列离散刀位点,使刀轴位移方向通过曲线参数跟随刀尖点位置运动, 利用五次b样条曲线对余留位置曲线进行余留直线段或余留圆弧段的重新参数化,实现 刀轴角速度、角加速度在跨段处连续;在刀尖点路径与刀轴方向路径两者转接光顺及参 数同步之后,结合设置的约束条件,进行速度规划,生成实际加工所需要的插补点。
13.进一步地,还包括如下步骤:
14.步骤5,对刀尖点空间位置路径中空间直线段与圆弧段g2转接光顺进行仿真分析。
15.进一步地,还包括如下步骤:
16.步骤6,利用五自由度混联机器人加工平台,验证加工刀具路径g2转接光顺方法的 加工精度和加工效率。
17.进一步地,步骤1中,利用三次b样条曲线,实现跨段处刀尖点路径的g2连续。
18.进一步地,步骤1包括如下分步骤:
19.步骤1.1,在给定转接长度下,对应刀尖点路径中的两直线段转接,建立如下刀尖点 路径g2转接光顺模型,对两直线段转接光顺控制点进行解析求解;
[0020][0021][0022][0023]
步骤1.2,在给定转接长度下,对应刀尖点路径中的两圆弧段转接,建立如下刀尖点 路径g2转接光顺模型,对两圆弧段转接光顺控制点进行解析求解;
[0024]
[0025][0026][0027][0028]
式中,
[0029]
p(u)为三次b样条曲线方程;
[0030]
d
i
为三次b样条曲线各个控制点;
[0031]
n
i,3
(u)为定义在节点矢量u=(0,0,0,0,0.5,1,1,1,1)上的三次b样条基函数;
[0032]
p
i
(u)为样条曲线;
[0033]
p
l,i 1
(u)为余留直线段;
[0034]
p
c,i 1
(u)为余留圆弧曲线;
[0035]
m
e,i
为余留圆弧曲线p
c,i 1
(u)在点d
4,i
(u=0)切线的单位方向矢量;
[0036]
c
i 1
为圆弧段的圆心坐标;
[0037]
d
4,i
为样条曲线p
i
(u)和余留圆弧曲线p
c,i 1
(u)的连接点;
[0038]
r
i 1
为圆弧段的半径长度。
[0039]
进一步地,步骤2中,转接点处的空间位置误差定义成原始位置路径段到光顺路径 段的豪斯道夫距离。
[0040]
进一步地,步骤2包括如下分步骤:
[0041]
步骤2.1,定义空间转接光顺误差为:
[0042]
ε
p,i
=||p
i
‑
p
i
(u)||
[0043]
式中,
[0044]
ε
p,i
为空间转接光顺误差,其等于原始位置路径段到光顺路径段的豪斯道夫距离;
[0045]
p
i
为原始位置路径的拐角点;
[0046]
p
i
(u)为三次b样条曲线路径点;
[0047]
步骤2.2,对空间直线段与直线段进行转接光顺;
[0048]
步骤2.3,对空间直线段与圆弧段进行转接光顺;
[0049]
空间直线段与圆弧段进行转接光顺时,将转接段长度和圆心角定义成特征参数;用 姿态矩阵r
i
描述直线段和圆弧段的相对位置关系,表示为:
[0050]
m
s,i
=r
i
m
e,i
[0051]
其中m
e,i
为控制点d
4,i
处的单位切矢量,m
s,i
为点p
i
到点p
i 1
的单位方向矢量;d
4,i
为 样条曲线p
i
(u)和圆弧段曲线的连接点;
[0052]
根据转接光顺误差的定义表达式建立如下特征参数之间的关系表达式:
[0053][0054]
式中,
[0055]
r
i 1
为圆弧段路径半径长度;
[0056]
l
s,i
为直线段转接长度;
[0057]
c
s,i
为直线段转接比例系数;
[0058]
θ
e,i
为圆弧段转接路径所对应的圆心角大小;
[0059]
以误差变化规律分析为基础,对于特征参数进行求解;
[0060]
步骤2.4:对空间圆弧段与圆弧段进行转接光顺;空间圆弧段与圆弧段转接光顺时, 将转接段长度与圆心角定义成特征参数,采用三个姿态角定义姿态矩阵t
i
,
[0061]
[t
s,i
,b
s,i
,n
s,i
]=t
i
[t
e,i
,b
e,i
,n
e,i
];
[0062]
b
s,i
=n
s,i
×
t
s,i
;
[0063]
b
e,i
=n
e,i
×
t
e,i
;
[0064]
式中,
[0065]
t
s,i
为圆弧段在点p
i
处的切矢量;
[0066]
n
s,i
为圆弧段点p
i
到圆心角的单位方向矢量;
[0067]
t
e,i
为圆弧段在点p
i
处的切矢量;
[0068]
n
e,i
为圆弧段点p
i
到圆心角的单位方向矢量;
[0069]
根据转接光顺误差的定义表达式建立特征参数{θ
s,i
,θ
e,i
∈(0,π/2]}与光顺误差ε
p,i
之 间的关系表达式,同时以误差变化规律分析为基础,对于特征参数进行解析求解。
[0070]
本发明还提供了一种空间路径g2转接光顺设备,包括存储器和处理器,所述存储器 用于存储计算机程序;所述处理器,用于执行所述计算机程序并在执行所述计算机程序 时实现上述的空间路径g2转接光顺方法步骤。
[0071]
本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机 程序,其特征在于:该计算机程序被处理器执行时,实现上述的空间路径g2转接光顺方 法步骤。
[0072]
本发明具有的优点和积极效果是:
[0073]
本发明所提方法综合考虑直线—直线、直线—圆弧和圆弧—圆弧等三类空间位置相 接形式,能够实现误差解析控制。
[0074]
本发明通过插入三次b样条作为光顺曲线,分别建立了直线段和圆弧段等路径基本 单元的g2连续转接光顺模型,提出了一种解析的控制点构造方法。
[0075]
本发明提出了一种基于余留位置路径再参数化的参数同步策略,该方法能保证同步 后的刀具路径g2连续,相关算法可作为独立于机器人数控系统的前置处理模块。
路径g2转接光顺方法的加工精度和加工效率等有效性。
[0095]
进一步地,步骤1中,可利用三次b样条曲线,实现跨段处刀尖点路径的g2连续。
[0096]
进一步地,步骤1可包括如下分步骤:
[0097]
步骤1.1,可在给定转接长度下,对应刀尖点路径中的两直线段转接,建立如下刀尖 点路径g2转接光顺模型,对两直线段转接光顺控制点进行解析求解;
[0098][0099][0100][0101]
步骤1.2,可在给定转接长度下,对应刀尖点路径中的两圆弧段转接,建立如下刀尖 点路径g2转接光顺模型,对两圆弧段转接光顺控制点进行解析求解;
[0102][0103][0104][0105][0106]
式中,
[0107]
p(u)为三次b样条曲线方程;
[0108]
d
i
为三次b样条曲线各个控制点;
[0109]
n
i,3
(u)为定义在节点矢量u=(0,0,0,0,0.5,1,1,1,1)上的三次b样条基函数;
[0110]
p
i
(u)为样条曲线;
[0111]
p
l,i 1
(u)为余留直线段;
[0112]
p
c,i 1
(u)为余留圆弧曲线;
[0113]
m
e,i
为余留圆弧曲线p
c,i 1
(u)在点d
4,i
(u=0)切线的单位方向矢量;
[0114]
c
i 1
为圆弧段的圆心坐标;
[0115]
d
4,i
为样条曲线p
i
(u)和余留圆弧曲线p
c,i 1
(u)的连接点;
[0116]
r
i 1
为圆弧段的半径长度。
[0117]
进一步地,步骤2中,转接点处的空间位置误差可定义成原始位置路径段到光顺路 径段的豪斯道夫距离。
[0118]
进一步地,步骤2可包括如下分步骤:
[0119]
步骤2.1,可定义空间转接光顺误差为:
[0120]
ε
p,i
=||p
i
‑
p
i
(u)||
[0121]
式中,
[0122]
ε
p,i
为空间转接光顺误差,其等于原始位置路径段到光顺路径段的豪斯道夫距离;
[0123]
p
i
为原始位置路径的拐角点;
[0124]
p
i
(u)为三次b样条曲线路径点;
[0125]
步骤2.2,对空间直线段与直线段进行转接光顺;
[0126]
步骤2.3,对空间直线段与圆弧段进行转接光顺;
[0127]
空间直线段与圆弧段进行转接光顺时,可将转接段长度和圆心角定义成特征参数; 用姿态矩阵r
i
描述直线段和圆弧段的相对位置关系,可表示为:
[0128]
m
s,i
=r
i
m
e,i
[0129]
其中m
e,i
为控制点d
4,i
处的单位切矢量,m
s,i
为点p
i
到点p
i 1
的单位方向矢量;d
4,i
为 样条曲线p
i
(u)和圆弧段曲线的连接点。
[0130]
可根据转接光顺误差的定义表达式建立如下特征参数之间的关系表达式:
[0131][0132]
式中,
[0133]
r
i 1
为圆弧段路径半径长度;
[0134]
l
s,i
为直线段转接长度;
[0135]
c
s,i
为直线段转接比例系数;
[0136]
θ
e,i
为圆弧段转接路径所对应的圆心角大小;
[0137]
以误差变化规律分析为基础,对于特征参数进行求解;
[0138]
步骤2.4:对空间圆弧段与圆弧段进行转接光顺;空间圆弧段与圆弧段转接光顺时, 可将转接段长度与圆心角定义成特征参数,可采用三个姿态角定义姿态矩阵t
i
,
[0139]
[t
s,i
,b
s,i
,n
s,i
]=t
i
[t
e,i
,b
e,i
,n
e,i
];
[0140]
b
s,i
=n
s,i
×
t
s,i
;
[0141]
b
e,i
=n
e,i
×
t
e,i
;
[0142]
式中,
[0143]
t
s,i
为圆弧段在点p
i
处的切矢量;
[0144]
n
s,i
为圆弧段点p
i
到圆心角的单位方向矢量;
[0145]
t
e,i
为圆弧段在点p
i
处的切矢量;
[0146]
n
e,i
为圆弧段点p
i
到圆心角的单位方向矢量;
[0147]
可根据转接光顺误差的定义表达式建立特征参数{θ
s,i
,θ
e,i
∈(0,π/2]}与光顺误
差ε
p,i
之间的关系表达式,可同时以误差变化规律分析为基础,对于特征参数进行解析求解。
[0148]
本发明还提供了一种空间路径g2转接光顺设备实施例,该设备包括存储器和处理器, 所述存储器用于存储计算机程序;所述处理器,用于执行所述计算机程序并在执行所述 计算机程序时实现上述的空间路径g2转接光顺方法步骤。
[0149]
本发明还提供了一种计算机可读存储介质实施例,所述计算机可读存储介质存储有 计算机程序,其特征在于:该计算机程序被处理器执行时,实现上述的空间路径g2转接 光顺方法步骤。
[0150]
下面以本发明的一个优选实施例来进一步说明本发明的工作流程及工作原理:
[0151]
步骤1:建立刀尖点路径g2转接光顺模型:
[0152]
步骤1.1:直线段转接光顺控制点求解
[0153]
利用三次b样条曲线,实现跨段出刀尖点路径的g2连续。
[0154][0155]
如图1所示,图中,l
i 1
和l
r,i 1
分别表示原始和余留路径段的长度,l
e,i
和l
s,i 1
表示转 接段长度。将点p
i
到点p
i 1
的单位方向矢量记作m
e,i
,将点p
i 1
到点p
i
的单位方向矢量记 作m
s,i 1
。为保证样条曲线p
i
(u)和直线段p
l,i 1
(u)在连接点d
4,i
处g2连续,应满足关系:
[0156][0157][0158]
通过上述方程的求解,在给定转接长度l
e,i
和l
s,i 1
时,就可以确定转接曲线p
i
(u)的控 制点{d
2,i
,d
3,i
,d
4,i
}以及转接曲线p
i 1
(u)的控制点{d
0,i 1
,d
1,i 1
,d
2,i 1
}的解析表达式。
[0159]
步骤1.2:圆弧段转接光顺控制点求解
[0160]
同步骤1.1,利用三次b样条曲线,实现跨段出刀尖点路径的g2连续。如图2所示, 将圆弧段的圆心角、弧长、圆心和半径分别记作γ
i 1
、l
i 1
、c
i 1
和r
i 1
。θ
e,i
和θ
s,i 1
分别表 示转接段对应的圆心角。使样条曲线p
i
(u)和直线段p
l,i 1
(u)在连接点d
4,i
处g2连续,应满 足与步骤1.1相同关系,同时对于圆弧段:
[0161][0162][0163]
记m
e,i
为余留圆弧曲线p
c,i 1
(u)在点d
4,i
(u=0)切线的单位方向矢量。
[0164]
通过方程的求解,在给定圆弧半径r
i 1
和圆心角θ
s,i 1
时,就可以确定转接曲线p
i
(u)的 控制点{d
2,i
,d
3,i
,d
4,i
}以及转接曲线p
i 1
(u)的控制点{d
0,i 1
,d
1,i 1
,d
2,i 1
}的解析表达式。
[0165]
步骤2:空间位置路径转接光顺:
[0166]
步骤2.1:空间转接光顺误差的定义
[0167]
转接点处的空间位置误差定义成原始位置路径段到光顺路径段的豪斯道夫距离,则 光顺误差可表示为:
[0168]
ε
p,i
=||p
i
‑
p
i
(u)||
[0169]
步骤2.2:空间直线与直线段转接光顺
[0170]
根据已有文献的方法进行直线与直线转接光顺误差与特征参数之间的关系表达式, 并对相关特征参数进行求解。
[0171]
步骤2.3:空间直线与圆弧段转接光顺
[0172]
直线段与圆弧段转接光顺过程,将转接段长度/圆心角{l
s,i
,θ
e,i
}定义成特征参数。其 中由于空间中直线段与圆弧段具有一定的相对位置关系,如图3所示,所以利用姿态矩 阵r
i
描述直线段和圆弧段的相对位置关系,可以表示为:
[0173]
m
s,i
=r
i
m
e,i
[0174]
其中m
e,i
为控制点d
4,i
处的单位切矢量,m
s,i
为点p
i
到点p
i 1
的单位方向矢量;
[0175]
根据转接光顺误差的定义表达式建立特征参数{l
s,i
,θ
e,i
}之间的关系表达式,
[0176][0177]
同时以误差变化规律分析为基础,对于特征参数进行求解。
[0178]
步骤2.4:空间圆弧与圆弧段转接光顺
[0179]
如图4所示,圆弧段与圆弧段转接光顺过程,将转接段长度/圆心角{θ
s,i
,θ
e,i
∈(0,π/2]} 定义成特征参数,同时由于空间圆弧—圆弧段相接形式复杂多样,需要采用三个姿态角 定义姿态矩阵r
i
[0180]
[t
s,i
,b
s,i
,n
s,i
]=r
i
[t
e,i
,b
e,i
,n
e,i
]
[0181]
根据转接光顺误差的定义表达式建立特征参数{θ
s,i
,θ
e,i
∈(0,π/2]}与光顺误差ε
p,i
之 间的关系表达式,同时以误差变化规律分析为基础,对于特征参数进行求解。
[0182]
步骤3:刀轴方向路径转接光顺:
[0183]
步骤3.1:将刀轴方向路径定义在在单位球表面上,如图5所示,同时可知在单 位球面上的转接光顺类似于步骤2.4中的空间中圆弧段与圆弧段转接光顺,将转接段圆 心角定义成特征参数,根据其这一特点,依据步骤2.4,进行刀轴方向路径转接 误差与特征参数的求解。
[0184]
步骤4:参数同步与轨迹生成:
[0185]
步骤4.1:给定一系列离散刀位点,通过步骤2和步骤3,光顺后的位置路径由插入 的光顺曲线和余留位置路径组成,在参数插补过程中,刀尖点位置被视作主运动,刀轴 方向通过曲线参数跟随刀尖点位置运动,若位置曲线和方向曲线的采用相同的曲线参数 计算插补点,刀轴角速度和角加速度会在跨段处产生跳变。为克服上述问题,提出一种 余留位置曲线再参数化算法,在此基础上利用五次b样条曲线进行余留直线段或余留圆 弧段的
再参数化,能确保方向曲线关于位置曲线弧长参数s的一阶、二阶导数在跨段处连 续,进而实现刀轴角速度、角加速度在跨段处连续。
[0186]
步骤4.2:在位置曲线和方向曲线转接光顺和参数同步之后,结合相应的约束条件, 进行相应的速度规划。
[0187]
步骤4.3:生成实际加工所需要的插补点。
[0188]
步骤5:空间直线圆弧加工路径g2转接光顺仿真分析:
[0189]
步骤5.1:建立包含有空间直线与圆弧段的加工路径,在此原始路径的基础上,利用 步骤2、3和4可得到光顺后的刀具路径。
[0190]
步骤5.2:利用仿真分析得数据进行相应的分析。
[0191]
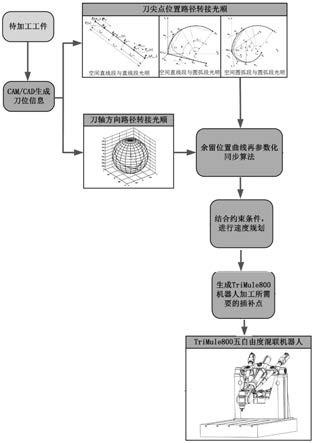
步骤6:空间直线圆弧加工路径g2转接光顺流程如图7所示,利用trimule800五自 由度混联机器人加工平台,验证所提方法的有效性。
[0192]
以上所述的实施例仅用于说明本发明的技术思想及特点,其目的在于使本领域内的 技术人员能够理解本发明的内容并据以实施,不能仅以本实施例来限定本发明的专利范 围,即凡本发明所揭示的精神所作的同等变化或修饰,仍落在本发明的专利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。