1.本发明涉及智能机器人技术领域,尤其是涉及一种搬运机器人。
背景技术:
2.随着物联网技术的发展以及人工成本的不断提高,起重搬运逐渐向自动化和智能化方向靠拢。同时随着智能技术不断发展,给物流企业也带来了很大的转变。智能搬运机器人有着承重大,运输效率高,自动化程度高,安全性高等特点,可以更好地帮助企业简化生产运输过程。目前智能搬运机器人技术应用到装卸搬运领域,是物流系统中最基本的功能单元之一,不仅能提高仓储物流的搬运效率,减轻人的体力劳动,而且可以优化资源,提高效益,具有十分广阔的发展前景和良好的经济效益。
3.申请号为cn201710911124.9的中国发明专利公开了一种门式搬运机器人,其包括机器人脚轮、龙门支架、底盘以及夹紧装置,通过该专利技术可以取代人工搬运。然而,该搬运机器人一次只能搬运一件货物,当需要搬运多件货物时,搬运机器人需要往返多次,搬运效率较低。
技术实现要素:
4.有鉴于此,有必要提供一种搬运机器人,用以解决现有的搬运机器人一次只能搬运一件货物、搬运效率较低的技术问题。
5.为了实现上述目的,本发明提供了一种搬运机器人,包括框架、行走机构、转动机构、抓取机构、起升机构及平移机构;
6.所述行走机构与所述框架连接且用于驱动所述框架移动;
7.所述转动机构包括转盘及转动驱动件,所述转盘转动设置于所述框架上,所述转动驱动件与所述转盘连接且用于驱动所述转盘转动;
8.所述抓取机构用于抓取货物;
9.所述起升机构与所述抓取机构连接且用于驱动所述抓取机构做升降运动;
10.所述平移机构固定安装于所述框架上,所述平移机构与所述起升机构连接且用于驱动所述起升机构平移。
11.优选地,所述行走机构包括若干个滚动件,各个所述滚动件均包括万向轮及滚动驱动电机,所述万向轮连接于所述框架的下端,所述滚动驱动电机与所述万向轮连接且用于驱动所述万向轮转动。
12.优选地,所述转动机构还包括若干个用于放置所述货物的旋转叶片,各个所述旋转叶片均水平设置,各个所述旋转叶片沿所述转盘的周向固定于所述转盘上。
13.优选地,所述旋转叶片上形成有用于对所述货物进行限位的限位凸起。
14.优选地,所述转动驱动件包括安装板、蜗轮、蜗杆及转动驱动电机,所述安装板固定于所述框架上,所述蜗轮固定于所述转盘上,所述蜗杆转动设置于所述安装板上,所述蜗杆与所述蜗轮啮合,所述转动驱动电机与所述蜗杆连接且用于驱动所述蜗杆转动。
15.优选地,所述抓取机构包括固定板、导向杆、两个夹手及抓取驱动件,所述固定板与所述起升机构连接,所述导向杆固定于所述固定板上,两个所述夹手均滑动设置于所述导向杆上,所述抓取驱动件与两个所述夹手连接且用于驱动两个所述夹手相互靠近或相互远离。
16.优选地,所述抓取驱动件包括转动杆、两个连接杆及抓取驱动电机,所述转动杆的中端转动设置于所述固定板上,两个所述连接杆的一端分别与两个所述夹手铰接,两个所述连接杆的另一端分别与所述转动杆的两端铰接,所述抓取驱动电机与所述转动杆连接且用于驱动所述转动杆转动。
17.优选地,所述起升机构包括载板、起升电机、绕线筒、拉绳及限位杆,所述载板与所述平移机构连接,所述载板上开设有限位孔,所述起升电机固定安装于所述载板上,所述绕线筒同轴固定于所述起升电机的输出轴上,所述拉绳的一端绕设于所述绕线筒上,所述拉绳的另一端与所述固定板固定连接,所述限位杆滑动插设于所述限位孔内,所述限位杆的下端与所述固定板固定连接。
18.优选地,所述平移机构包括主动轮、从动轮、同步带及平移电机,所述主动轮及所述从动轮均转动设置于所述框架上,所述同步带闭合设置,所述同步带的一端绕设于所述主动轮上,所述同步带的另一端绕设于所述从动轮上,所述同步带与所述载板固定连接,所述平移电机与所述主动轮连接且用于驱动所述主动轮转动。
19.优选地,所述平移机构还包括导轨及滑块,所述导轨固定于所述框架上且与所述同步带平行,所述滑块滑动设置于所述导轨上,所述滑块与所述载板固定连接。
20.与现有技术相比,本发明提出的技术方案的有益效果是:通过抓取机构、起升机构及平移机构的配合,将多个货物依次抓取到转盘上,通过转动驱动件驱动转盘转动从而使转盘上堆放的货物被均匀摆放,通过行走机构带动整个装置在货物堆放处和卸货处往复移动,本发明提供的搬运机器人每次往复时,可一次性输送多个货物,大大提高了货物的装卸效率。
附图说明
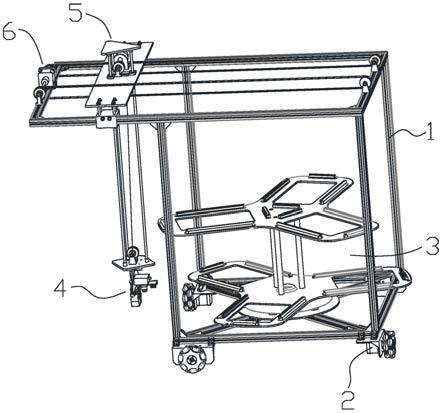
21.图1是本发明提供的搬运机器人的一实施例的使用状态示意图;
22.图2是图1中的搬运机器人的立体结构示意图;
23.图3是图2中的行走机构的立体结构示意图;
24.图4是图2中的转动机构的立体结构示意图;
25.图5是图4中的转动机构在另一个视角的立体结构示意图;
26.图6是图2中的抓取机构的立体结构示意图;
27.图7是图6中的抓取机构在另一个视角的立体结构示意图;
28.图8是图2中的起升机构的立体结构示意图;
29.图9是图2中的平移机构的立体结构示意图;
30.图中:1
‑
框架、2
‑
行走机构、3
‑
转动机构、4
‑
抓取机构、5
‑
起升机构、6
‑
平移机构、7
‑
货物、21
‑
滚动件、211
‑
万向轮、212
‑
滚动驱动电机、31
‑
转盘、32
‑
转动驱动件、321
‑
安装板、322
‑
蜗轮、323
‑
蜗杆、33
‑
旋转叶片、331
‑
限位凸起、41
‑
固定板、42
‑
导向杆、43
‑
夹手、44
‑
抓取驱动件、441
‑
转动杆、442
‑
连接杆、443
‑
抓取驱动电机、51
‑
载板、52
‑
起升电机、53
‑
绕线
筒、54
‑
拉绳、55
‑
限位杆、61
‑
主动轮、62
‑
从动轮、63
‑
同步带、64
‑
平移电机、65
‑
导轨、66
‑
滑块。
具体实施方式
31.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
32.请参照图1和图2,本发明提供了一种搬运机器人,包括框架1、行走机构2、转动机构3、抓取机构4、起升机构5及平移机构6。
33.所述行走机构2与所述框架1连接且用于驱动所述框架1移动。所述转动机构3包括转盘31及转动驱动件32,所述转盘31转动设置于所述框架1上,所述转动驱动件32与所述转盘31连接且用于驱动所述转盘31转动。
34.所述抓取机构4用于抓取货物。所述起升机构5与所述抓取机构4连接且用于驱动所述抓取机构4做升降运动。所述平移机构6固定安装于所述框架1上,所述平移机构6与所述起升机构5连接且用于驱动所述起升机构5平移。
35.在使用时,通过行走机构2将框架1移动到货物7的堆放处,并使抓取机构4对准某一个货物7,然后通过起升机构5带动抓取机构4下降,使抓取机构4接触到该货物7,之后通过抓取机构4抓取该货物7,然后通过起升机构5带动抓取机构4上升,通过平移机构6带动起升机构5平移到转盘31的上方,再使抓取机构4释放货物7,货物7落到转盘31,然后继续通过同样的方法将下一个货物7抓取到转盘31上,直到转盘31上被堆满(为避免转盘31上货物堆放不均匀,在接收货物7时,可转动转盘31),再通过行走机构2将整个装置移动到预定卸货处,然后将转盘31上的货物以此卸载到卸货处。
36.本发明通过抓取机构4、起升机构5及平移机构6的配合,将多个货物7依次抓取到转盘31上,通过转动驱动件32驱动转盘31转动从而使转盘31上堆放的货物被均匀摆放,通过行走机构2带动整个装置在货物堆放处和卸货处往复移动,本发明提供的搬运机器人每次往复时,可一次性输送多个货物7,大大提高了货物7的装卸效率。
37.为了具体实现行走机构2的功能,请参照图2和图3,在一优选的实施例中,所述行走机构2包括若干个滚动件21,各个所述滚动件21均包括万向轮211及滚动驱动电机212,所述万向轮211连接于所述框架1的下端,所述滚动驱动电机212与所述万向轮211连接且用于驱动所述万向轮211转动,本实施例中,万向轮211为福来轮,其可全方位移动。
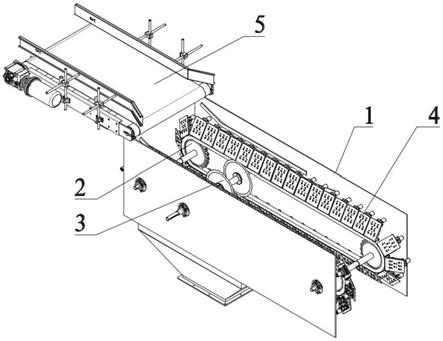
38.为了便于在转盘31上摆放更多货物7,请参照图1、图2、图4和图5,在一优选的实施例中,所述转动机构3还包括若干个用于放置所述货物7的旋转叶片33,各个所述旋转叶片33均水平设置,各个所述旋转叶片33沿所述转盘31的周向固定于所述转盘31上,本实施例中,一个旋转叶片33上可放置一个货物7,同时,旋转叶片33设计为双层结构并相互错开,从而可放置更多货物7。
39.为了防止旋转叶片33上的货物7从旋转叶片33上滑落,请参照图1、图2、图4和图5,在一优选的实施例中,所述旋转叶片33上形成有用于对所述货物7进行限位的限位凸起331。
40.为了具体实现转动驱动件32的功能,请参照图2
‑
图5,在一优选的实施例中,所述转动驱动件32包括安装板321、蜗轮322、蜗杆323及转动驱动电机(未示出),所述安装板321
固定于所述框架1上,所述蜗轮322固定于所述转盘31上,所述蜗杆323转动设置于所述安装板321上,所述蜗杆323与所述蜗轮322啮合,所述转动驱动电机与所述蜗杆323连接且用于驱动所述蜗杆323转动,在需要转动转盘31时,转动驱动电机带动蜗杆323转动,蜗杆323带动蜗轮322转动,蜗轮322带动转盘31转动。
41.为了具体实现抓取机构4的功能,请参照图2、图6和图7,在一优选的实施例中,所述抓取机构4包括固定板41、导向杆42、两个夹手43及抓取驱动件44,所述固定板41与所述起升机构5连接,所述导向杆42固定于所述固定板41上,两个所述夹手43均滑动设置于所述导向杆42上,所述抓取驱动件44与两个所述夹手43连接且用于驱动两个所述夹手43相互靠近或相互远离,从而实现抓取功能。
42.为了具体实现抓取驱动件44的功能,请参照图2、图6和图7,在一优选的实施例中,所述抓取驱动件44包括转动杆441、两个连接杆442及抓取驱动电机443,所述转动杆441的中端转动设置于所述固定板41上,两个所述连接杆442的一端分别与两个所述夹手43铰接,两个所述连接杆442的另一端分别与所述转动杆441的两端铰接,所述抓取驱动电机443与所述转动杆441连接且用于驱动所述转动杆441转动,本实施例中,连接杆442的形状为圆弧形,从而可避免连接杆442在特定位置转动受阻,在使用时,抓取驱动电机443带动转动杆441转动,转动杆441经由两个连接杆442带动两个所述夹手43相互靠近或相互远离,从而实现抓取功能。
43.为了具体实现起升机构5的功能,请参照图2和图8,在一优选的实施例中,所述起升机构5包括载板51、起升电机52、绕线筒53、拉绳54及限位杆55,所述载板51与所述平移机构6连接,所述载板51上开设有限位孔,所述起升电机52固定安装于所述载板51上,所述绕线筒53同轴固定于所述起升电机52的输出轴上,所述拉绳54的一端绕设于所述绕线筒53上,所述拉绳54的另一端与所述固定板41固定连接,所述限位杆55滑动插设于所述限位孔内,所述限位杆55的下端与所述固定板41固定连接,在使用时,通过起升电机52带动绕线筒53转动,从而使拉绳54在绕线筒53的缠绕圈数增加或减少,以调节固定板41的高度,而限位杆55的作用是防止固定板41发生横向摆动。
44.为了具体实现平移机构6的功能,请参照图2和图9,在一优选的实施例中,所述平移机构6包括主动轮61、从动轮62、同步带63及平移电机64,所述主动轮61及所述从动轮62均转动设置于所述框架1上,所述同步带63闭合设置,所述同步带63的一端绕设于所述主动轮61上,所述同步带63的另一端绕设于所述从动轮62上,所述同步带63与所述载板51固定连接,所述平移电机64与所述主动轮61连接且用于驱动所述主动轮61转动,从而使载板51发生平移。
45.为了提高载板51平移过程的稳定性,请参照图2和图9,在一优选的实施例中,所述平移机构6还包括导轨65及滑块66,所述导轨65固定于所述框架1上且与所述同步带63平行,所述滑块66滑动设置于所述导轨65上,所述滑块66与所述载板51固定连接,从而通过导轨65与滑块66的配合,使载板51的平移过程更为稳定。
46.为了更好地理解本发明,以下结合图1
‑
图9来对本发明提供的搬运机器人的工作过程进行详细说明:在使用时,通过滚动驱动电机212驱动万向轮211转动,从而将框架1移动到货物7的堆放处,并使抓取机构4对准某一个货物7,然后通过起升机构5带动抓取机构4下降,使两个夹手43到达该货物7的两侧,之后通过抓取驱动电机443带动两个夹手43相互
靠近,从而夹紧货物7,然后通过起升电机52带动带动绕线筒53转动,从而经由拉绳54带动货物7上升,通过平移电机64带动同步带63转动,从而使载板51横向移动,从而将货物7平移到转盘31的上方,再使两个夹手43释放货物7,货物7落到旋转叶片33上,然后继续通过同样的方法将下一个货物7抓取到下一个旋转叶片33上,直到各个旋转叶片33上均被堆满(可转动转盘31,使各个旋转叶片33依次到达接收位置,从而便于操作),再通过行走机构2将整个装置移动到预定卸货处,然后将转盘31上的货物以此卸载到卸货处。
47.需要指出的是,为了实现货物7的自动搬运,需要本装置还具备视觉识别功能,具体实现方法如下:
48.抓取机构4上安装有视觉识别模块,视觉识别模块可选用openmv摄像头模块或k210摄像头模块,其中openmv摄像头模块是一个低成本、功能强大的机器视觉模块,利用micropython编程语言进行代码的编写,内含各种各样的程序模块,比如人脸识别、边缘检测、色块追踪等等,摄像头与内置芯片合为一体;k210摄像头模块是一种国产芯片,可以实现诸多功能比如:图像识别、语音识别等等,用途更广泛,搭载摄像头后即可实现图像识别功能。k210同样是使用micropython语言编写程序,其中的函数库大部分都是参考openmv移植而来,几乎与openmv没有区别。因此,在图像识别方面,二者的功能相同。
49.由于机器的视觉与人眼视觉不同,在使用程序时需要根据环境的明亮程度调整颜色的阈值,即设定颜色标准,使得摄像头能够准确地识别出“它眼中的”颜色。摄像头模块还需要与主控板(单片机)进行通讯,使得摄像头模块处理完毕的数据能够传输到主控板,从而让主控板可以实现下一步的动作。
50.具体操作方法是在货物7上贴上红色、蓝色的圆形、方形、三角形的标记,通过openmv摄像头模块对形状与颜色的特定识别,分辨出红色、蓝色的圆形、方形、三角形。在颜色识别方面,通过阈值选择,调用颜色识别函数,即可实现。在形状识别方面,我们调用利用霍夫变换进行圆识别,利用四元检测算法来识别矩形,通过识别线段与判断内角和是否为180
°
来实现三角形的识别。
51.通过视觉识别模块可实现视觉识别功能,使得本装置可自动识别需要搬运的货物,从而实现自动搬运。
52.以上所述仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。