技术特征:
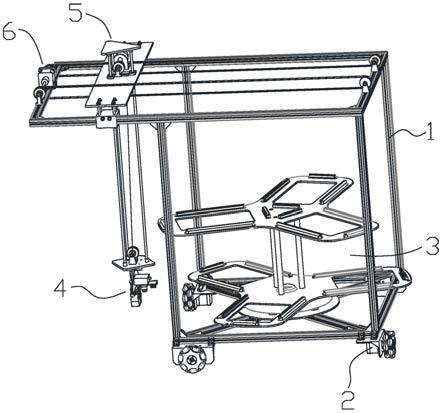
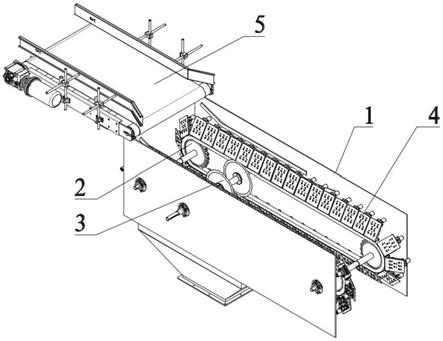
1.一种搬运机器人,其特征在于,包括框架、行走机构、转动机构、抓取机构、起升机构及平移机构;所述行走机构与所述框架连接且用于驱动所述框架移动;所述转动机构包括转盘及转动驱动件,所述转盘转动设置于所述框架上,所述转动驱动件与所述转盘连接且用于驱动所述转盘转动;所述抓取机构用于抓取货物;所述起升机构与所述抓取机构连接且用于驱动所述抓取机构做升降运动;所述平移机构固定安装于所述框架上,所述平移机构与所述起升机构连接且用于驱动所述起升机构平移。2.根据权利要求1所述的搬运机器人,其特征在于,所述行走机构包括若干个滚动件,各个所述滚动件均包括万向轮及滚动驱动电机,所述万向轮连接于所述框架的下端,所述滚动驱动电机与所述万向轮连接且用于驱动所述万向轮转动。3.根据权利要求1所述的搬运机器人,其特征在于,所述转动机构还包括若干个用于放置所述货物的旋转叶片,各个所述旋转叶片均水平设置,各个所述旋转叶片沿所述转盘的周向固定于所述转盘上。4.根据权利要求3所述的搬运机器人,其特征在于,所述旋转叶片上形成有用于对所述货物进行限位的限位凸起。5.根据权利要求1所述的搬运机器人,其特征在于,所述转动驱动件包括安装板、蜗轮、蜗杆及转动驱动电机,所述安装板固定于所述框架上,所述蜗轮固定于所述转盘上,所述蜗杆转动设置于所述安装板上,所述蜗杆与所述蜗轮啮合,所述转动驱动电机与所述蜗杆连接且用于驱动所述蜗杆转动。6.根据权利要求1所述的搬运机器人,其特征在于,所述抓取机构包括固定板、导向杆、两个夹手及抓取驱动件,所述固定板与所述起升机构连接,所述导向杆固定于所述固定板上,两个所述夹手均滑动设置于所述导向杆上,所述抓取驱动件与两个所述夹手连接且用于驱动两个所述夹手相互靠近或相互远离。7.根据权利要求6所述的搬运机器人,其特征在于,所述抓取驱动件包括转动杆、两个连接杆及抓取驱动电机,所述转动杆的中端转动设置于所述固定板上,两个所述连接杆的一端分别与两个所述夹手铰接,两个所述连接杆的另一端分别与所述转动杆的两端铰接,所述抓取驱动电机与所述转动杆连接且用于驱动所述转动杆转动。8.根据权利要求6所述的搬运机器人,其特征在于,所述起升机构包括载板、起升电机、绕线筒、拉绳及限位杆,所述载板与所述平移机构连接,所述载板上开设有限位孔,所述起升电机固定安装于所述载板上,所述绕线筒同轴固定于所述起升电机的输出轴上,所述拉绳的一端绕设于所述绕线筒上,所述拉绳的另一端与所述固定板固定连接,所述限位杆滑动插设于所述限位孔内,所述限位杆的下端与所述固定板固定连接。9.根据权利要求8所述的搬运机器人,其特征在于,所述平移机构包括主动轮、从动轮、同步带及平移电机,所述主动轮及所述从动轮均转动设置于所述框架上,所述同步带闭合设置,所述同步带的一端绕设于所述主动轮上,所述同步带的另一端绕设于所述从动轮上,所述同步带与所述载板固定连接,所述平移电机与所述主动轮连接且用于驱动所述主动轮转动。
10.根据权利要求9所述的搬运机器人,其特征在于,所述平移机构还包括导轨及滑块,所述导轨固定于所述框架上且与所述同步带平行,所述滑块滑动设置于所述导轨上,所述滑块与所述载板固定连接。
技术总结
本发明公开了一种搬运机器人,包括框架、行走机构、转动机构、抓取机构、起升机构及平移机构;转动机构包括转盘及转动驱动件,转盘转动设置于框架上,转动驱动件与转盘连接且用于驱动转盘转动;起升机构与抓取机构连接且用于驱动抓取机构做升降运动;平移机构固定安装于框架上,平移机构与起升机构连接且用于驱动起升机构平移。本发明的有益效果是:通过抓取机构、起升机构及平移机构的配合,将多个货物依次抓取到转盘上,通过转动驱动件驱动转盘转动从而使转盘上堆放的货物被均匀摆放,通过行走机构带动整个装置在货物堆放处和卸货处往复移动,本发明提供的搬运机器人每次往复时,可一次性输送多个货物,大大提高了货物的装卸效率。率。率。
技术研发人员:胡志辉 易家乐 石婷 袁建明 罗淮中 李怡函 谭小龙
受保护的技术使用者:武汉理工大学
技术研发日:2021.08.20
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。